Infrastructure
Laboratories
The offices and main laboratories of our research group are located in TUW’s Campus Gußhaus (Gußhausstraße 27-29, A-1040 Wien) within the CD04 hallway. We currently operate a “Manipulation Lab” in room CD0432, a “Locomotion Lab” in room CD0428, as well as a “Field Robotics Lab” in room CFU145. The Locomotion Lab and the Field Robotics Lab are equipped with an Optitrack Motion Capture System.



Robot Systems
Manipulators
 |
3x Franka Research 3
7DoF torque-controlled manipulator arm by Franka Robotics |
 |
2x Kinova Gen3
7 DoF torque-controlled manipulator arm, equipped with Robotiq Gripper |
 |
1x Duatic DynaArm
6 DoF quasi-direct-drive manipulator |
 |
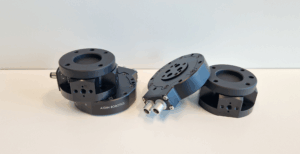
VSA Cubes from qbRobotics
Modular actuators based on anthagonistic actuation principle. |
Integrated Systems
 |
Dual arm manipulator
Dual arm manipulation setup based on two 7DoF torque-controlled manipulator arms, mounted on a vertical torso joint. |
 |
Suspended Aerial Manipulator
Suspended aerial manipulator equipped with a Kinova Gen 3 robot arm for research on maintenance and inspection. |
 |
Mobile Manipulator system
Mobile manipulator system equipped with a Kinova Gen 3 robot, a 6DOF force/torque sensor, and a Gripper for research on mobile manipulation and teleoperation. |
Humanoids
 |
Kangaroo robbot by PAL Robotics
Adult sized humanoid robot for research on agile locomotion. |
 |
BRUCE by Westwood Robotics
Small scale humanoid robot for research and education. |
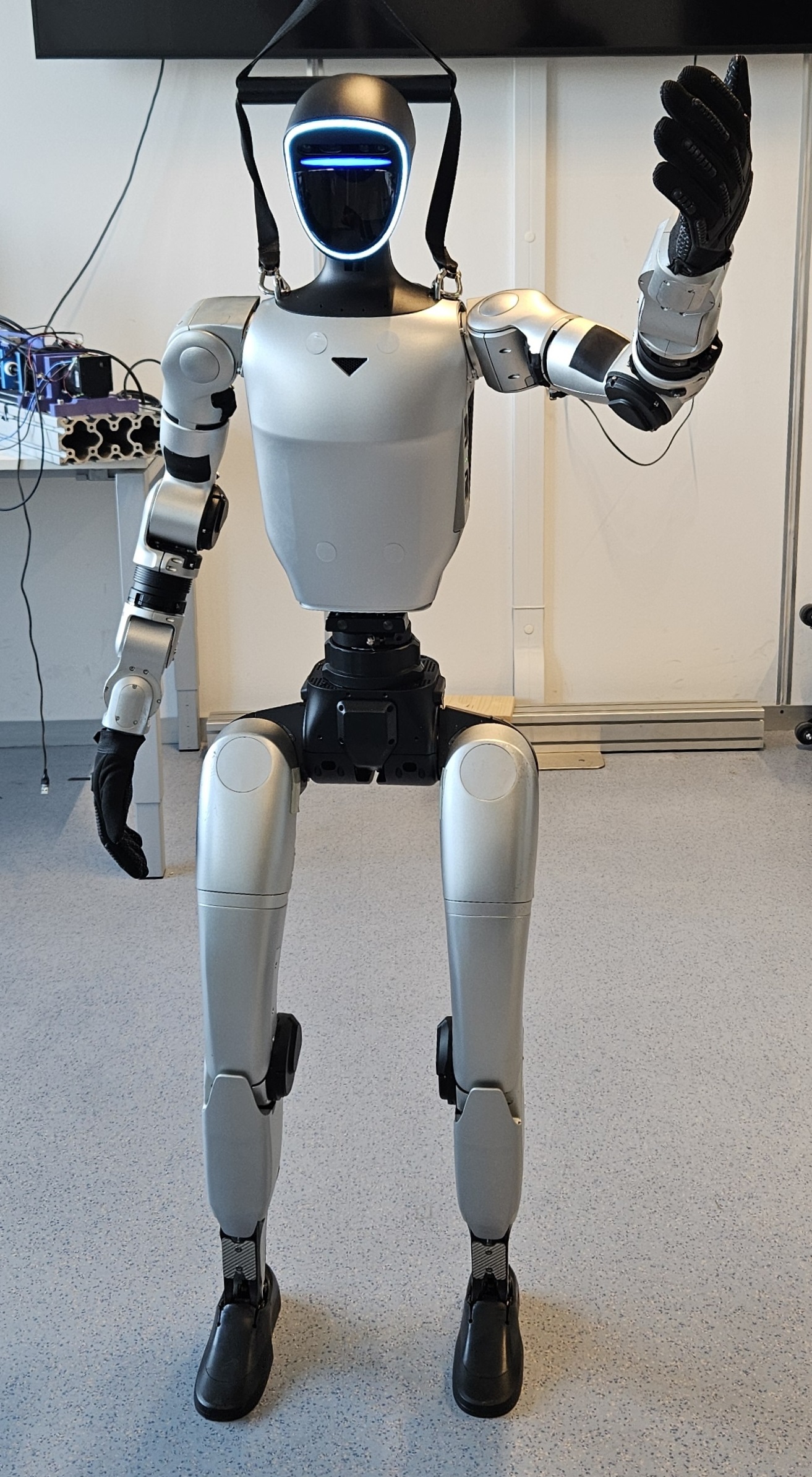 |
G1 by Unitree
Medium to full size humanoid robot. |
Hands and Grippers
 |
2x Allegro Hands V5 by Wonik Robotics
Dexterous robot hands in right and left handed configuration. |
 |
2x Robotiq Grippers
Two fingered grippers. |
Mobile Robots
 |
LYNX from Husarion
Mobile platform for indoor and outdoor use. |
Force/Torque Sensors
 |
4x 6-axis Force/Torque Sensors from AIDIN Robotics (2x AFT 200) and BOTA Systems (2x SENSONE) |
Haptic devices
 |
Inverse.3 from Haply |
Motion Capture Systems
 |
2x Optitrack Motion Camera System
Two systems with XX Prime 13 and 8 Prime 22 cameras |
3D Printers
 |
Raise 3D Pro3 Plus |
 |
Creality K2 Plus Combo |