
Quality Control of Injection Molding Machines2024 - 2027
Injection molding is the most prominent way to produce components made of plastics. In this research project, control strategies are developed using data-driven models and iterative learning control to ensure stable, high-quality injection molding. The focus lies on automated quality control and cycle time optimization under quality constraints. Read more →
Modeling and High-Precision Control of a Permanent Magnet Linear Synchronous Motor2021 - 2025
An efficient modeling and control approach is being developed in this project for permanent magnet linear motors with arbitrarily curved segments. Based on a highly accurate model, energy-efficient currents are calculated to ensure precise force generation for shuttle movement. By employing a learning-based control method, high-precision position control is achieved in both single- and multi-shuttle operation, even at close or varying distances between shuttles. Read more →
Caring Robots // Robotic Care2022 - 2027
Our aim is to re-imagine robotic technology in care by developing technology that is useful, safe, meaningful, and wanted, through a design process that involves caregivers, people in care, care organizations, and other stakeholders. Read more →

MANiBOT2023 - 2026
Advancing the physical intelligence and performance of roBOTs towards human-like bi-manual objects MANipulation Read more →

TraceBot2021 - 2025
Traceable Robotic Handling of Sterile Medical Products Read more →
iChores2022 - 2025
Intuitive Collaboration with Household Robots in Everyday Settings Read more →
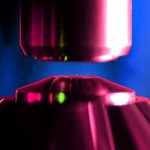
Control of Motional Quantum States for Levitated Particles2023 - 2025
This project aims to generate motional quantum states of mesoscopic, optically levitated particles utilizing real-time algorithms and methods from control theory. By their unrivaled sensitivity, levitated nanoparticles hold promises ranging from commercial sensing applications to the search for new physics. Read more →
Control strategies for quantum fields2022 - 2025
The key motivation of this project is to develop control algorithms that enable essential operations for quantum simulation with sufficient precision for ultra-cold atom experiments. As such we aim at developing tools for two distinct physical situations: the operation of small thermal machines acting on the quantum fields and the controlled, coherent splitting of Bose gases. Read more →

Recycling Heroes2022 - 2024
Recycling Heroes - Anwendung von Citizen Science in Schulen um die Kreislaufwirtschaft in der Elektronikindustrie zu fördern Read more →

Optimization of start times and product sequences in a multi-line hot rolling mill
In a project together with voestalpine Böhler Edelstahl GmbH & Co KG, the start times and sequence of products in multi-line profile rolling plant are optimized. Based on mathematical models for processing times of all relevant plant sections, an algorithm that computes optimal product start times is developed. The algorithm considers the stochastic nature of the actual processing times. Moreover, a combinatoric optimization problem for the product selection and sequence is formulated and solved. Read more →