Tracking Evaluation
A Methodology for Performance Evaluation of Model-based Tracking*
Model-based object tracking has become an important means to perform robot navigation and visual servoing tasks. Until today it is still difficult to define robustness parameters which allow the direct comparison of tracking approaches and that provide objective measures of progress achieved with respect to robustness. Particularly, extensive algorithm testing is an obstacle because of the difficulty to extract ground truth. In this paper, we propose a methodology based on the evaluation of a video database which contains real-world image sequences with well-defined movements of modeled objects. It is suggested to set up and extend this database as a benchmark. Moreover, tests of the performance evaluation of the tracking system V4R (Vision for Robotics) are presented.
Video database of real-world image sequences
First image preview | Sequence description | Sequence zipped
 Gray cube moving backwards left | gray_cube1.zip
Gray cube moving backwards left | gray_cube1.zip
 Gray cube moving backwards left | gray_cube2.zip
Gray cube moving backwards left | gray_cube2.zip
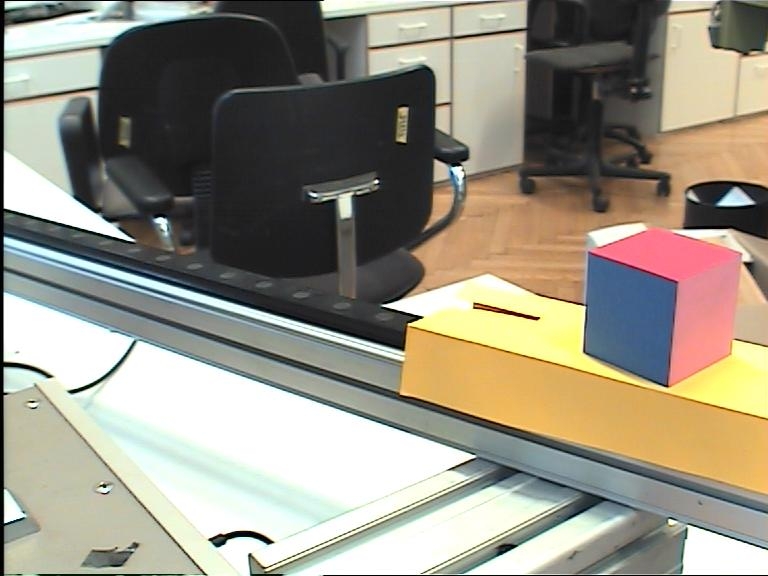 Color cube moving backwards left | color_cube3.zip
Color cube moving backwards left | color_cube3.zip
 Color cube moving backwards left | color_cube4.zip
Color cube moving backwards left | color_cube4.zip
 Color cube moving towards right | color_cube5.zip
Color cube moving towards right | color_cube5.zip
 Color cube moving towards right | color_cube6.zip
Color cube moving towards right | color_cube6.zip
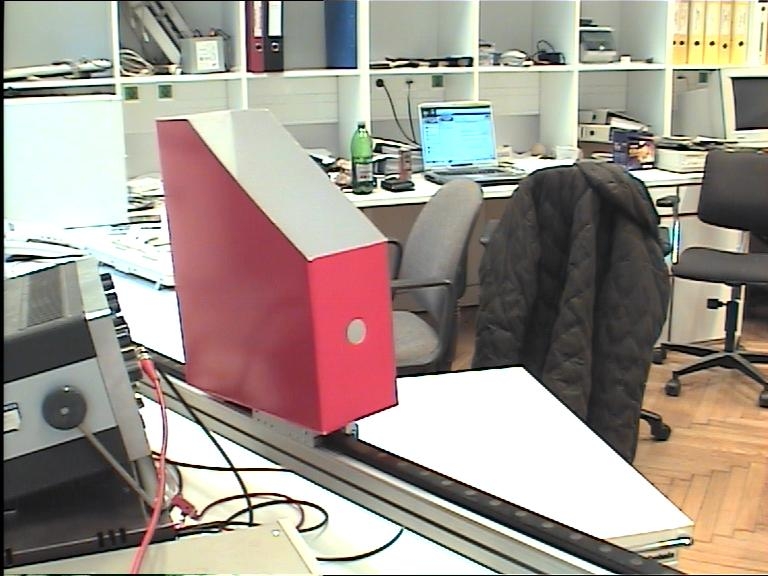
 Magazine box moving backwards left | magazine_box7.zip
Magazine box moving backwards left | magazine_box7.zip
Magazine box moving backwards left | magazine_box8.zip
 Magazine box moving towards right | magazine_box9.zip
Magazine box moving towards right | magazine_box9.zip
 Magazine box moving towards right | magazine_box10.zip
Magazine box moving towards right | magazine_box10.zip
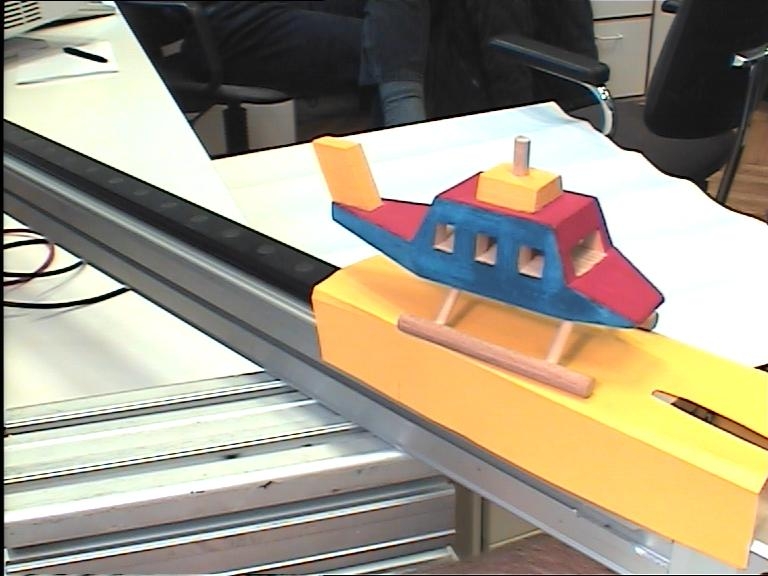 Toy copter moving backwards left | toy_copter11.zip
Toy copter moving backwards left | toy_copter11.zip
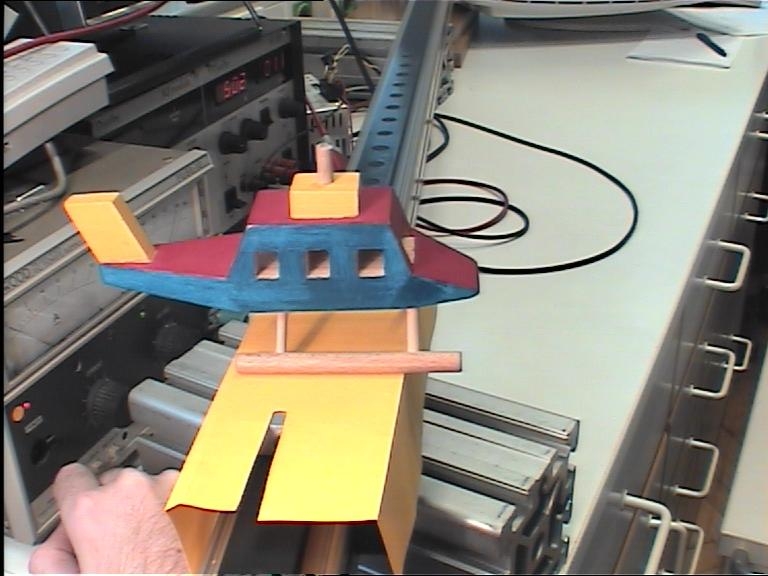 Toy copter moving backwards right | toy_copter12.zip
Toy copter moving backwards right | toy_copter12.zip
 Toy copter moving backwards right | toy_copter13.zip
Toy copter moving backwards right | toy_copter13.zip
* This work has been supported by the EU-Project ActIPret under grant IST-2001-32184.