Fast trajectory planning for robotic systems in the presence of obstacles and dynamically moving targets
Project focus
- Fast planning and replanning of trajectories
- Obstacle avoidance, moving targets
- MPC-based trajectory tracking control
Description
This research work addresses the development of new methods for fast path planning in presence of obstacles and moving targets.This is an important topic for various applications in the field of robotics, handling systems and construction machines such as cranes or collaborative robots. Fig. 1 shows the lab-sized experimental setup of the 3D gantry crane. The task is to implement a fast algorithm to re-plan the trajectories for a payload to reach the moving truck while avoiding obstacles.
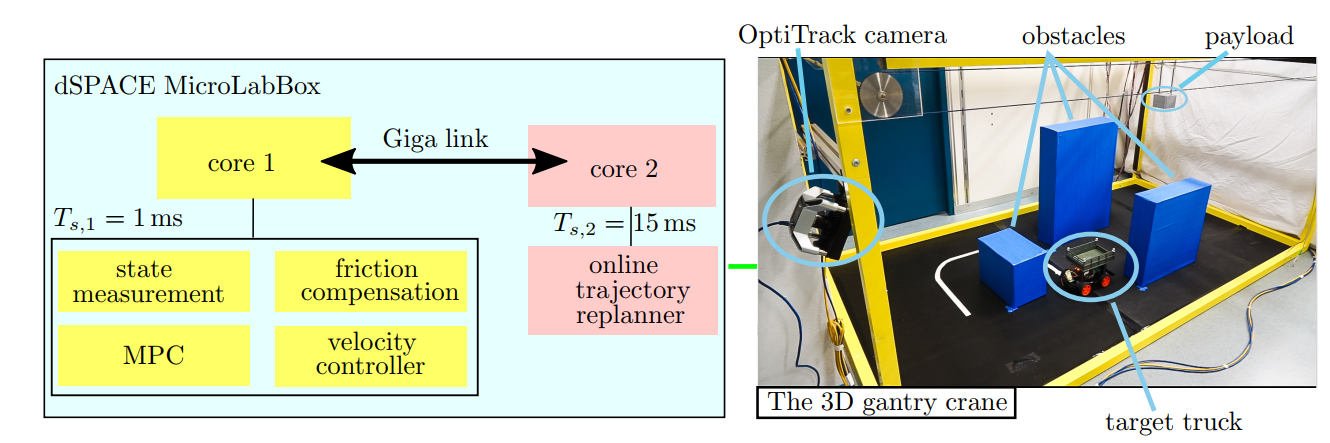
Fig. 1: System overview and experimental setup of the 3D gantry crane
Description
In this research, fast optimization-based trajectory planning algorithms are investigated and implemented in both simulation and experiment. Since optimization of trajectory planning usually takes a long time, it is reasonable to use the suboptimal solutions as the initial guess trajectory then refine the overall solution through iterations. In addition, the proposed algorithm should be able to generate a new trajectory when the target configuration changes by using previously computed suboptimal solutions from a database. In addition, fast trajectory planning must be executed at any time, i.e., the algorithms can be interrupted at any time, but will always lead to reasonable, albeit suboptimal, results. This is an important requirement for the real-time capability of the proposed algorithms.
The focus of this project lies on the efficient trajectory (re)planning, which consists of two steps:
- First, an offline trajectory planner is implemented to setup a time-optimal, collision-free, and dynamically feasible trajectory database that connects all the starting points from a predefined starting subspace to all target points in a target subspace.
- Second, based on linear constrained quadratic programming, the online trajectory replanner utilizes the offline trajectory database to generate an optimal trajectory in real time that accounts for all changes in the target state.
Additionally, a trajectory tracking controller is developed to take into account the dynamic constraints for the gantry crane and to compensate for the possible influence of model inaccuracies, disturbances, and other non-modeled effects.
Video
Selected publications
- M. N. Vu, P. Zips, A. Lobe, F. Beck, W. Kemmetmüller, and A. Kugi, Fast motion planning for a laboratory 3D gantry crane in the presence of obstacles, in Proceedings of the 21st IFAC World Congress, Berlin, Germany, 2020, p. 9508–9514.
[BibTex]@InProceedings{Vu2020, author = {Vu, M.N. and Zips, P. and Lobe, A. and Beck, F. and Kemmetmüller, W. and Kugi, A.}, booktitle = {Proceedings of the 21st IFAC World Congress}, title = {Fast motion planning for a laboratory 3D gantry crane in the presence of obstacles}, doi = {10.1016/j.ifacol.2020.12.2427}, note = {IFAC-PapersOnLine}, number = {2}, pages = {9508--9514}, volume = {53}, address = {Berlin, Germany}, issn = {2405-8963}, month = {06}, year = {2020}, }