Precision Motion Systems
Präzisions-Positioniersysteme
Motion control with highest precision at high bandwidths is a prerequisite for a broad variety of applications, such as scanning probe systems as well as for the next generation of lithography machines in semiconductor production, and other systems from high-tech industry.
A typical requirement and challenge for precision motion applications is the need to achieve a wide dynamic range of 5 to 9 orders of magnitude. Here often nanometer precision and bandwidths in the range of several hundred Hertz up to tens of kHz have to be achieved, while the positioning range has to cover hundreds of millimeters and motion speeds on the order of meters per second. Similar demands arise for tracking satellites with ground-based telescopes, where angular speeds of a few degrees per second and a precision better than 200 nano-radians have to be achieved.
For these types of precision mechatronic systems, our research strives to enable maximum performance by integrated mechatronic design. In order to push the current performance limits in terms of precision and bandwidth, our research on precision positioning also covers hardware development and testing of novel actuation and sensor systems, dual actuation and over-actuation, modern materials, and control hardware in combination with the integrated mechatronic design approach. In this course, we utilize and develop novel system designs and analysis methods, such as dynamic error budgeting, to optimize the motion system and the interrelation of control methods and the mechatronic hardware. On the control side, we utilize and develop modern control methods such as model-based, data-driven, and self-learning approaches that are tailored to the specific mechatronic system.
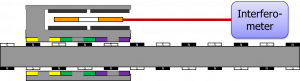
Dual actuation allows for positioning with nanometer precision over a positioning range of several hundred millimeters, by combining a zero stiffness actuator for the short stroke movement at nanometer precision with a conventional linear motor for the coarse positioning.
The research on precision mechatronics and precision motion control is of particular interest for the high-tech industry in Europe, where we also cooperate with various industrial partners in Austria as well as internationally.