HEAP2019 - 2022
In HEAP we focus on advancing the state-of-the-art for sorting a heap of unknown, irregular objects and provide appropriate benchmarks. Read more →

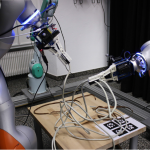
BURG2019 - 2022
In the BURG Project we set out to boost grasping research by focusing on complete tasks and the related object manipulation constraints. Read more →
RoboCoop2018 - 2022
The project is focused on young people and their interest on STEM disciplines (sciences, technology, engineering, mathematics). RoboCoop will organise workshops, where students have the opportunity to get to know robots. Read more →
iBridge2017 - 2019
The iBridge project is a cross-generational project aimed at increasing the interest of children and pupils in the social and cross-cultural research topics and innovation as well as deepening their relationship to science through the application of robotics in the elderly care technologies. Read more →
MMAssist II2017 - 2020
The goal of the project partners in MMAssist II is to research and implement modular, reusable assistance systems for employees in production companies. For that, the project partners will work on the exemplary uses cases Maintenance and Service, Arming of Machines and Simultaneous Handling of Multiple Machines, and Montage to analyze the technical and sozio-economic requirements for assistance systems in these areas. Read more →

RALLI2016 - 2019
Future social robots will need the ability to acquire new tasks and behaviors on the job both through observation and through natural language instruction, for robot designers cannot build in all environmental and task contingencies in typical application domains such as health care settings or people’s homes. In this project, we tackle the critical subproblem of learning new actions and their corresponding words by the artificial system observing how those actions are performed and expressed by humans. Read more →
ACROSSING2016 - 2019
ACROSSING is an innovative research training network funded by the EU H2020 Marie Sklodowska-Curie Actions programme which aims to change the way millions of the older people in Europe live and maintain wellbeing. The project aims to make a critical contribution towards an open smart home technology infrastructure by interlinking disciplines from sensing technologies, context inferences and interaction and considering key principles of social impact, ethics, security and privacy. Read more →
RoboFit2016 - 2019
Over the course of the project RoboFit, classes from all ages visit the institute to listen to a lecture about robotics, to try out robot navigation during a brief workshop, and to see a demo of our robots Romeo or Pepper. Read more →
AssistMe2015 - 2017
AssistMe develops and evaluates during a user-centered multistage process innovative means of interaction for programming and usage of a robot-based assistive system. Central topic is the integration of users in the concept development where the interaction paradigms are defined as well as in the evaluation stage of the developed technology. Read more →
ALOOF2015 - 2017
ALOOF will enable robots to tap into the ever-growing amount of knowledge available on the Web, by learning from there about the meaning of previously unseen objects, expressed in a form that makes them applicable when acting in situated environments. By searching the Web, robots will be able to learn about new objects, their specific properties, where they might be stored and so forth. Read more →