Active camera stabilization platform
Project focus
- Optimization of the setup (actuators, sensors) of a camera stabilization platform
- Attitude estimation strategy utilizing redundant inertial measurement units
- Design of a nonlinear attitude control strategy
- Implementation and test on a camera stabilization platform prototype
Description
In many movie scenes or video clips, the camera is dynamically moved to change the perspective or to make a more engaging film. Typically, camera cranes, steadycams, cable cams, or helicopter cameras are used in the production of such video sequences. To avoid distracting changes of the line of sight induced by movements of the mobile carrier vehicle, the camera is inertially stabilized. For this task, inertially stabilized platforms (ISPs) with gimbaled assemblies are widely used.
In this project, a new active camera stabilization platform developed by qinematiq was considered. It features a gimbal with three degrees of freedom which is actuated by electric motors in each joint. The orientation of the camera and the handle with respect to the inertial frame is measured utilizing inertial measurement units (IMUs), see Fig. 1.
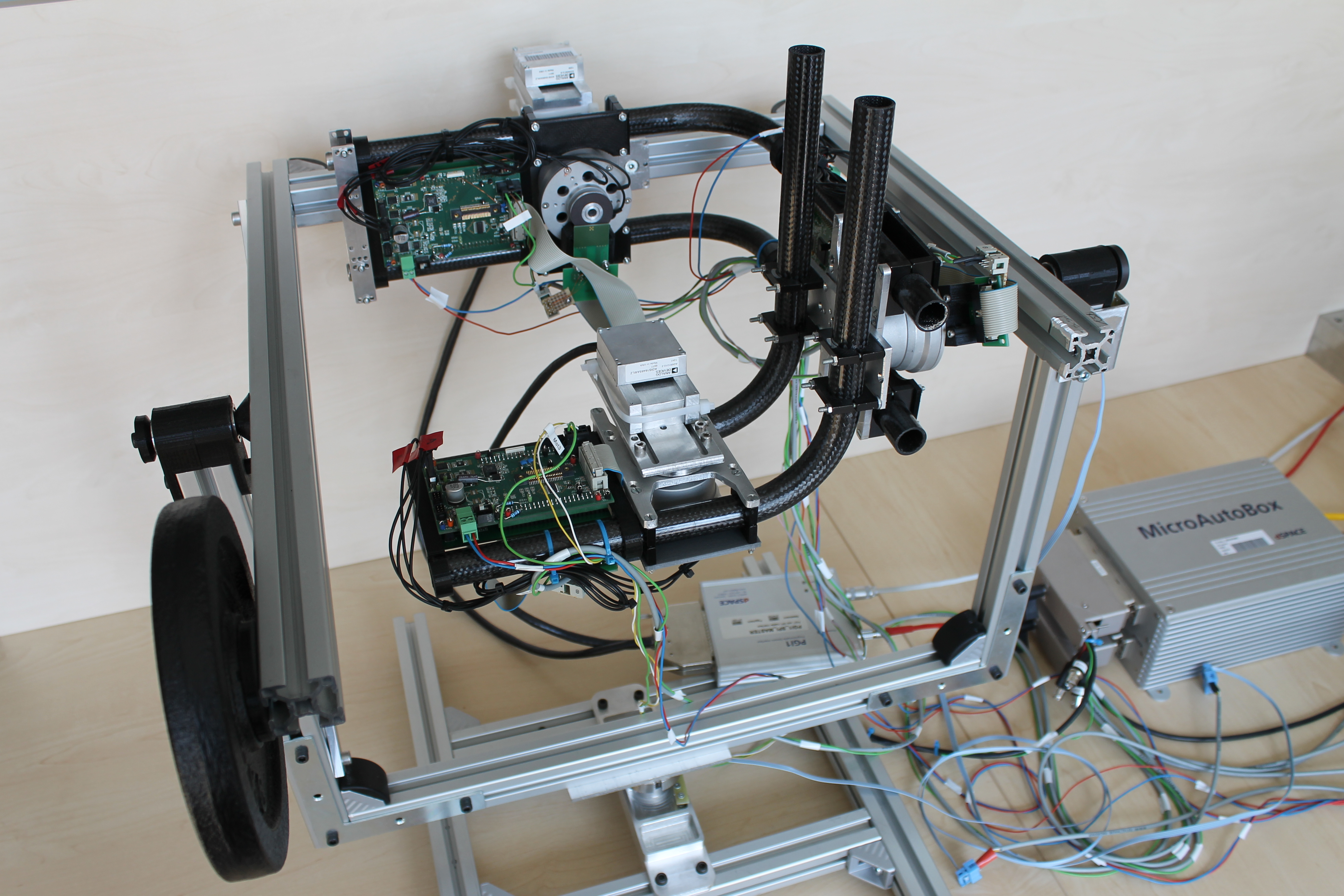
Experimental setup of the camera stabilization platform
The main control task is to control the camera orientation according to a desired orientation which is defined by the camera operator. For this task, a nonlinear flatness-based control strategy was developed, which is based on the estimation of the camera orientation and the orientation of the handle of the platform. In order to obtain these orientations from the measurements of the IMU, a multiplicative extended Kalman filter (MEKF) was developed, which fuses the signals of all sensors of the platform. As an essential step to reach the desired accuracy of the platform, the design and the choice of actuators and sensors of the platform were of immanent importance. The practical feasibility of the overall estimation and control strategy was proven by experiments on a prototype platform.
Selected publications
- F. Königseder, W. Kemmetmüller, and A. Kugi, Attitude Estimation Using Redundant Inertial Measurement Units for the Control of a Camera Stabilization Platform, IEEE Transactions on Control Systems Technology, vol. 24, iss. 5, p. 1837–1844, 2016.
[BibTex] [Download]@Article{Koenigseder16, Title = {Attitude Estimation Using Redundant Inertial Measurement Units for the Control of a Camera Stabilization Platform}, Author = {K{\"o}nigseder, F. and Kemmetm{\"u}ller, W. and Kugi, A.}, Journal = {IEEE Transactions on Control Systems Technology}, Pages = {1837--1844}, Volume = {24}, Year = {2016}, Number = {5}, Doi = {10.1109/TCST.2015.2510324}, ISSN = {1063-6536}, } - F. Königseder, W. Kemmetmüller, and A. Kugi, Modellierung und Regelung einer tragbaren Kamerastabilisierungsplattform, in Tagungsband Mechatronik 2013, Aachen, Germany, 2013, p. 99–104.
[BibTex]@InProceedings{Konigseder13, author = {F. K{\"o}nigseder and W. Kemmetm{\"u}ller and A. Kugi}, title = {{{M}odellierung und {R}egelung einer tragbaren {K}amerastabilisierungsplattform}}, booktitle = {Tagungsband Mechatronik 2013}, year = {2013}, month = {3}, pages = {99--104}, address = {Aachen, Germany}, }
Project partners and funding
Contact
Univ.Prof. Dr.-Ing. Wolfgang KemmetmüllerUniv.-Prof. Dr.techn. Andreas Kugi