Atomic Force Microscopy capable of vibration isolation (Vibrostop AFM)
Project focus
- Development of an AFM that is capable of vibration isolation, potentially for on-site imaging.
- Mechanical design and motion control to achieve high vibration rejection and isolation.
Description
An atomic force microscope (AFM) can image and inspect a sample surface with high resolution by scanning a probe with a sharp tip over the sample. During scanning, the vertical position of the probe with respect to the sample typically needs to be regulated with nanometer resolution. For the required high resolution, AFMs are sensitive to vibrations transmitted from the floor dependent on their design. Particularly when AFMs are designed to image large samples or when they include relatively heavy components (e.g. stepper motors for user-friendly automated AFMs), they have mechanical resonances at low frequencies. Floor vibration can excite these resonances, creating artifacts on AFM images by changing the probe-sample distance. Therefore, AFMs are usually mounted on vibration isolators and operated in quiet environments. Overall, the vibration sensitivity is a weakness of AFMs, restricting the measurement sites.
In order to enable on-site AFM imaging and inline metrology by overcoming that weakness, vibration isolation is integrated in an AFM in this project. The principle of the vibration isolation along the vertical Z axis is shown in Fig. 1, where an AFM head with a probe is attached to a moving platform that is vertically moved by vibration rejection actuators. These actuators maintain the distance between the AFM probe and the sample such that AFM images can be generated in a vibrational environment. This project focuses on the mechatronic system design of the proposed system, including selection of precision actuators, as well as mechanical component design and motion control.
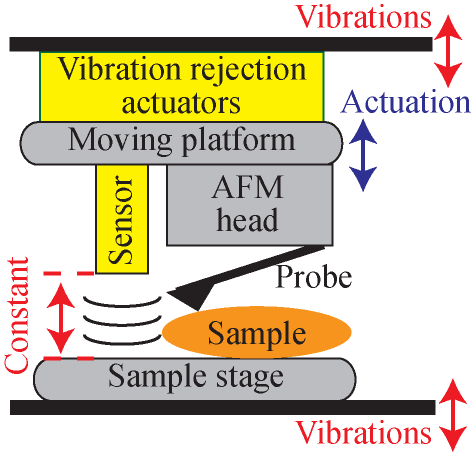
Principle of the vibration isolation integrated in an AFM.
Mechatronic Design
Due to their small size and high linearity without backlash and friction present in typical bearings, Lorentz actuators (voice coil actuators) are selected and guided by leaf spring flexures as the vibration rejection actuators. After they are attached to the moving platform, its frequency response is measured from the control input to the platform position, as shown in Fig. 2.
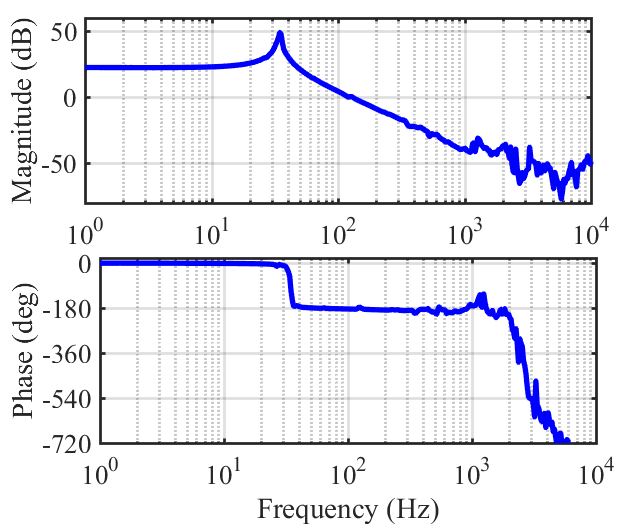
Measured Bode plot of the moving platform from the control input to the resulting platform position [Ito et al., Mechatronics, 44, 2017].
Precision Motion Control
The vibrations between the probe and the sample are detected by the displacement sensor in Fig. 1, and they are rejected by using a feedback controller. When the resulting closed-loop system has a control bandwidth significantly higher than the suspension mode’s frequency, the positioning system attains a high immunity against floor vibrations [Ito et al., IEEE TMECH, 21(2), 2016]. In this case, the suspension mode at 35 Hz can be used to increase the open-loop gain for better vibration rejection. For verification, the sensitivity function is measured as shown in Fig. 3(a), where a deep notch is visible at 35 Hz. This notch is especially beneficial for the moving platform to track the sample.
In addition to the sample tracking, the moving platform must isolate the vibrations from the actuators’ base (i.e. the upper vibrating plate in Fig.1). In order to validate the vibration isolation performance, the transmissibility is simulated based on a nominal plant model, as shown in Fig. 3(b). When the feedback controller is turned off, the response shows a high peak at 35 Hz because the floor vibrations strongly excite the suspension mode. However, this peak can be perfectly trimmed by turning on the feedback controller, which is due to the 35 Hz deep notch in Fig. 3(a). Consequently, the proposed system realizes the transmissibility that is smaller than 0 dB in the entire frequency range for high vibration isolation. Note that realization of such transmissibility is difficult by piezoelectric actuators, which are commonly used in AFMs.
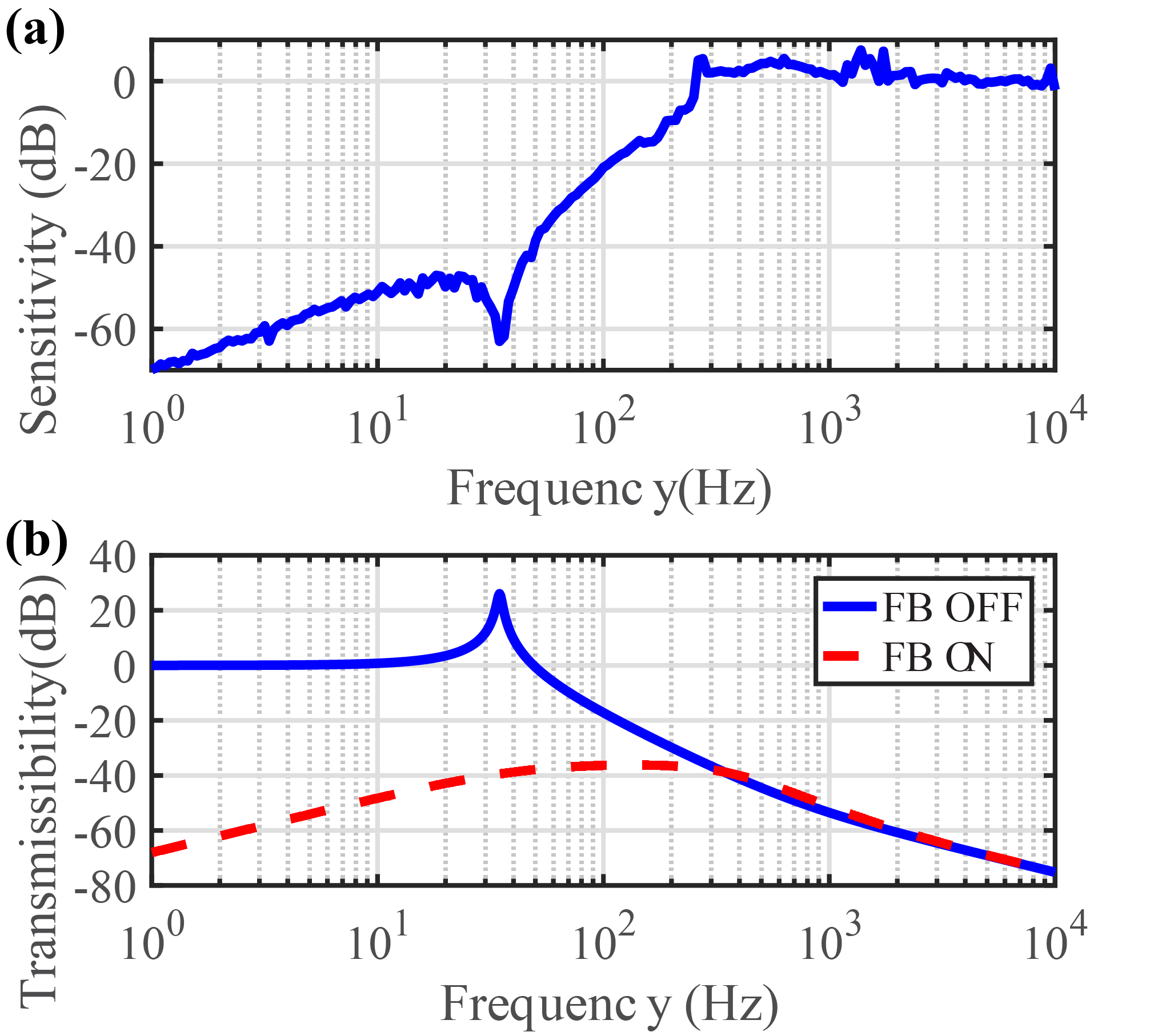
(a) Measured sensitivity function, and (b) simulated transmissibility when the feedback controller is turned off and on [Ito et al., Mechatronics, 44, 2017].
Scientific Imaging and Metrology Systems
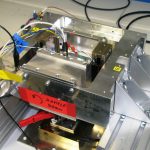
For an experimental demonstration, the proposed AFM system is operated without external vibration isolation on the fourth floor of a building directly under which the subway runs. According to the Vibration Criterion [Amick et al., SPIE, 5933, Aug. 2005], the environment is not suitable for high resolution imaging systems .
Fig. 4 shows images of a calibration grating with a height of 114 nm. When the feedback control is turned off (Fig.4(a)), the sample features are not clearly visible due to the grainy stripes resulting from the floor vibrations although they might be roughly guessed. However, by turning on the feedback controller in Fig. 4(b), the circular features can be clearly distinguished. Overall, the experimental results successfully demonstrate the effectiveness of the proposed AFM system that enables AFM imaging in vibrational environment.
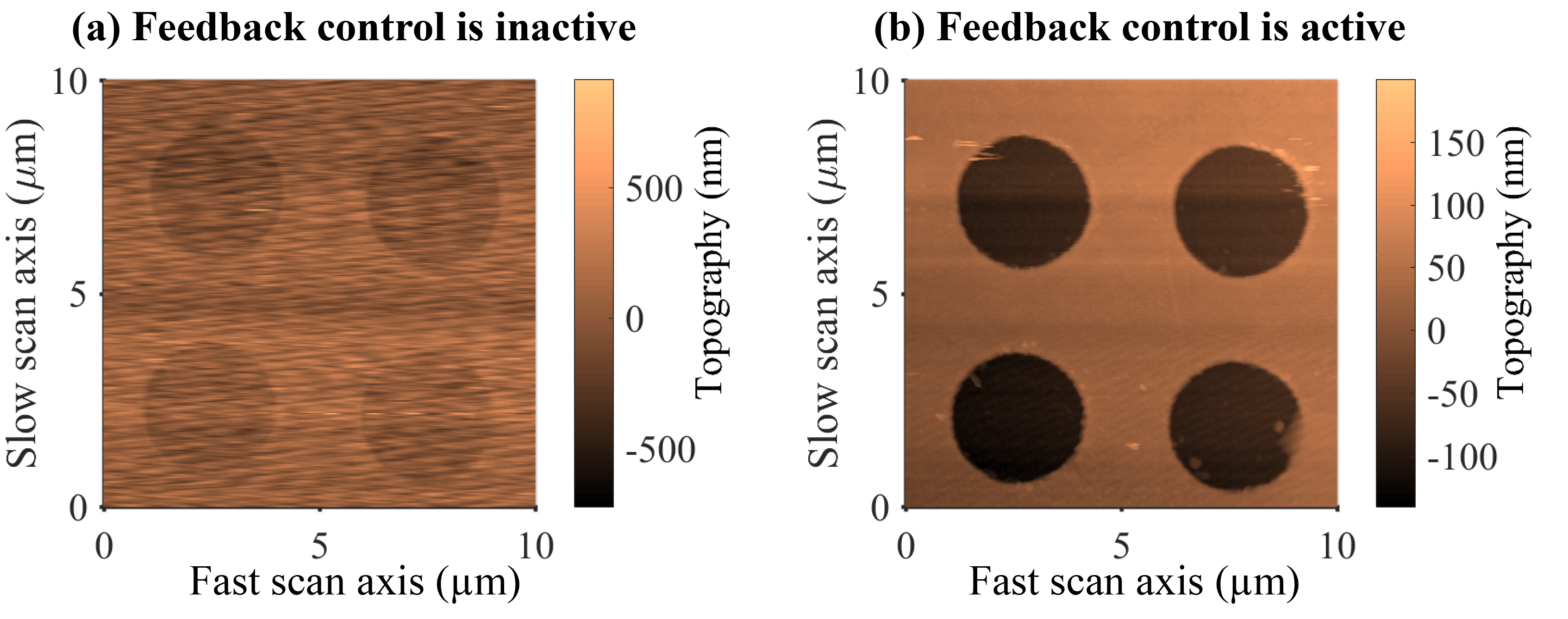
Topography images generated by the proposed AFM system when the feedback controller is (a) turned off and (b) turned on. See [Ito et al., Mechatronics, 44, 2017] for more results and analysis.
Applications
- In-line and on-line metrology
- On-site atomic force microscopy (e.g. during field trips)
Related publications
- S. Ito and G. Schitter, Atomic Force Microscopy Capable of Vibration Isolation with Low-stiffness Z-axis Actuation, Ultramicroscopy, vol. 186, 2018.
[BibTex] [Download]@Article{TUW-263910, author = {Ito, Shingo and Schitter, Georg}, title = {Atomic Force Microscopy Capable of Vibration Isolation with Low-stiffness Z-axis Actuation}, journal = {Ultramicroscopy}, year = {2018}, volume = {186}, doi = {10.1016/j.ultramic.2017.12.007}, keywords = {Atomic force microscopy, Vibration isolation, Voice coil actuators, Robust control}, numpages = {9}, }
- S. Ito and G. Schitter, Optimal Fail-Safe Motion Using Dynamic Brake for Lorentz-actuated AFM, in Proceedings of the 2018 15th International Workshop on Advanced Motion Control (AMC), 2018.
[BibTex] [Download]@InProceedings{TUW-268843, author = {Ito, Shingo and Schitter, Georg}, title = {Optimal Fail-Safe Motion Using Dynamic Brake for Lorentz-actuated AFM}, booktitle = {Proceedings of the 2018 15th International Workshop on Advanced Motion Control (AMC)}, year = {2018}, note = {Vortrag: 2018 15th International Workshop on Advanced Motion Control (AMC), Tokyo (Japan); 2018-03-09 -- 2018-03-11}, numpages = {6}, }
- S. Ito, S. Unger, and G. Schitter, Vibration isolator carrying atomic force microscope’s head, Mechatronics, vol. 44, p. 32–41, 2017.
[BibTex] [Download]@Article{TUW-259386, Title = {Vibration isolator carrying atomic force microscope's head}, Author = {Ito, Shingo and Unger, Severin and Schitter, Georg}, Journal = {Mechatronics}, Year = {2017}, Pages = {32--41}, Volume = {44}, Doi = {10.1016/j.mechatronics.2017.04.008}, }
- S. Ito and G. Schitter, Comparison and Classification of High-precision Actuators Based on Stiffness Influencing Vibration Isolation, IEEE/ASME Transactions on Mechatronics, vol. 21(2), 2016.
[BibTex] [Download]@Article{TUW-241933, Title = {Comparison and Classification of High-precision Actuators Based on Stiffness Influencing Vibration Isolation}, Author = {Ito, Shingo and Schitter, Georg}, Journal = {IEEE/ASME Transactions on Mechatronics}, Year = {2016}, Volume = {21(2)}, Doi = {10.1109/TMECH.2015.2478658}, Keywords = {Motion control, actuators, vibrations}, Numpages = {10}, }
- S. Ito, J. Steininger, and G. Schitter, Low-stiffness Dual Stage Actuator for Long Rage Positioning with Nanometer Resolution, Mechatronics, vol. 29, p. 46–56, 2015.
[BibTex] [Download]@Article{TUW-240765, Title = {Low-stiffness Dual Stage Actuator for Long Rage Positioning with Nanometer Resolution}, Author = {Ito, Shingo and Steininger, J{\"u}rgen and Schitter, Georg}, Journal = {Mechatronics}, Year = {2015}, Pages = {46--56}, Volume = {29}, Doi = {10.1016/j.mechatronics.2015.05.007}, }
- S. Ito, F. Cigarini, S. Unger, and G. Schitter, Flexure design for precision positioning using low-stiffness actuators, in Proceedings of the 7th IFAC Symposium on Mechatronic Systems, 2016, p. 200–205.
[BibTex]@InProceedings{TUW-251121, Title = {Flexure design for precision positioning using low-stiffness actuators}, Author = {Ito, Shingo and Cigarini, Francesco and Unger, Severin and Schitter, Georg}, Booktitle = {Proceedings of the 7th IFAC Symposium on Mechatronic Systems}, Year = {2016}, Note = {Posterpr{\"a}sentation: 7th IFAC Symposium on Mechatronic Systems {\&} 15th Mechatronics Forum International Conference, Loughborough (Vereinigte K{\"o}nigreich); 2016-09-05 -- 2016-09-08}, Pages = {200--205}, Doi = {10.1016/j.ifacol.2016.10.548}, Keywords = {Flexure, Lorentz actuator, voice coil motor, precision positioning} }
Project partners
Funding
Contact
MAS, Dr.techn. Shingo ItoUniv.-Prof. Dipl.-Ing. Dr.sc.techn. Georg Schitter
Project Staff
MAS, Dr.techn. Shingo ItoDipl.-Ing. Severin Unger
Dott. mag. Fabio Busnelli
Dipl.-Ing. Stefan Pirker
Dipl.-Ing. Daniel Neyer