Precision actuator selection
Project focus
- Compact high-precision actuators with high vibration isolation capability are defined as “low-stiffness actuators”, and their design guidelines are developed.
- Actuators for high-precision positioning are classified into three categories for analysis and understanding of vibration isolation capability.
- The effectiveness of the guidelines is experimentally demonstrated.
Description
Many applications require positioning with nanometer resolution. They include lithographic equipment for semiconductor and liquid crystal display (LCD) manufacturing and data storage devices such as hard disk drives (HDDs) and optical disk drives (ODDs) (e.g. CD/DVD/Blu-ray), as well as scientific instruments such as atomic force microscopes (AFMs). The achievable positioning resolution of these systems is typically influenced by vibrations transmitted from the floor. Dependent on the vibration sensitivity, external vibration isolation may be required, and the operation sites are restricted. For example, AFMs are typically sensitive to floor vibrations and usually used in a quiet room in spite of the use of external vibration isolators.
The sensitivity of the precision systems to floor vibrations is dependent on their actuator types, mechanical design and control design. Therefore, the relation between mechatronics designs and the floor vibration sensitivity is analyzed in this project. The aim of the analysis and the project is to develop design guidelines of compact precision positioning systems with immunity against floor vibrations, such that they can be operated in vibrational environments without external vibration isolation.
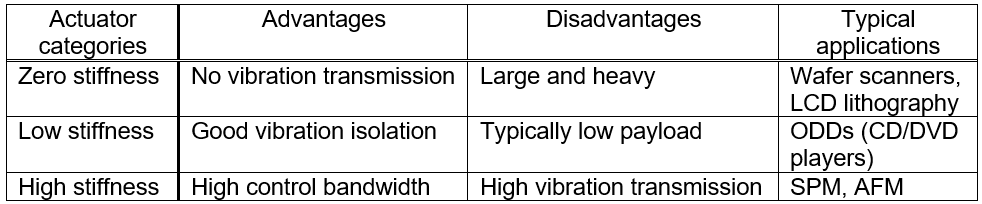
As illustrated in Fig.1, floor vibrations transmit from the base to the mover of the actuators in the precision systems. Therefore, the floor vibration sensitivity can be related to the actuator stiffness k between the mover and base. For the analysis, the high positioning systems are categorized dependent on the stiffness into three groups: high-stiffness, zero-stiffness and low-stiffness actuators, as listed in Table 1.
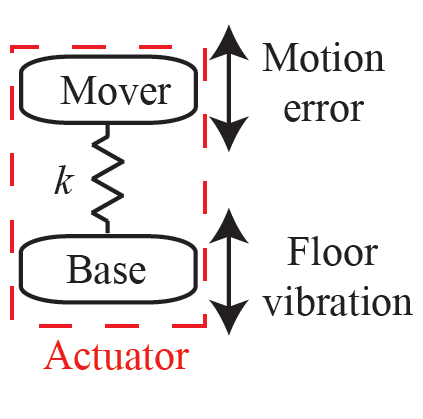
Simplified illustration of an actuator in precision systems
Actuator classification
High stiffness actuators
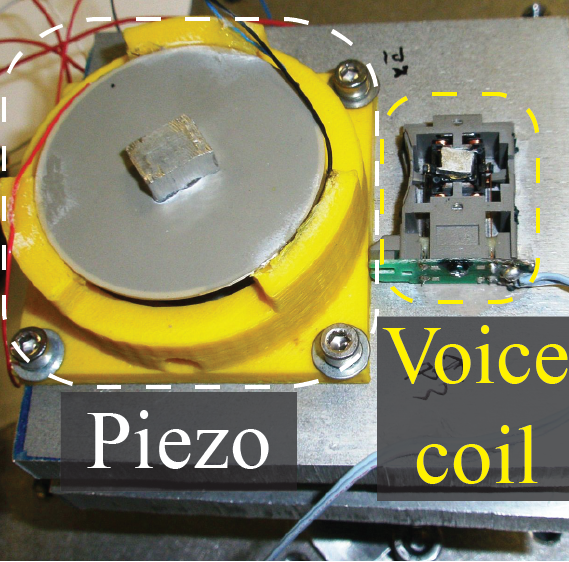
Systems with high-stiffness actuators are realized by using piezoelectric actuators, which have high stiffness between the mover and the base. Piezos have the advantages of easy miniaturization and high bandwidth. For example, piezos are mounted onto Lorentz actuators (voice coil actuators) and applied to HDDs and magnetic tape recording systems. For very high-resolution imaging, an AFM uses piezos for scanning. Piezos’ relatively high force and high stiffness are utilized in a feed drive system for machining. However, the high stiffness of the actuators strongly transmits vibrations from the floor to the mover, degrading the positioning resolution.
Zero-stiffness actuators
Systems with zero-stiffness actuators are realized with Lorentz actuators that can physically decouple the mover from the base. Such actuators are often combined with linear motors and applied to wafer scanners for lithography. Due to the zero stiffness, floor vibrations do not transmit to the mover for high-precision motion control. However, to ensure the zero stiffness, the mover need to be suspended usually by means of air feet or magnetic levitation. Consequently, these systems tend to be heavy and bulky with granite plates and air pumps for pneumatic suspension or with several sensors and actuators for magnetic levitation. Particularly the heavy mover results in a trade-off between the achievable speed and the positioning resolution, commonly known as “Mass dilemma” [Munnig Schmidt et al., “The design of High Performance Mechatronics”, 2014].
Low-stiffness actuators
In the case of low-stiffness actuators, the mover of Lorenz actuators is loosely suspended by flexures with a lowered stiffness. Consequently, the overall system can be compact unlike zero-stiffness actuators. The low stiffness is beneficial to reduce the transmission of floor vibrations, and the residual vibrations are actively isolated by means of feedback control for positioning with high resolution. Low-stiffness actuators are typically found in applications with a low payload, such as ODDs (CD, DVD and Blue-ray players). This might be because supporting a heavy mass is difficult with flexures with a low stiffness.
Table 1: Categories of high precision actuators
Definition and design guidelines of low-stiffness actuators
In comparison of the actuator categories, low-stiffness actuators have advantages that they are compact and have high vibration isolation. To develop design guidelines to construct low-stiffness actuators, they are defined as ones with the transmissibility smaller than 0 dB for all frequencies.
Based on the definition and a mechatronic system model, a design guideline of low-stiffness actuators is developed as follows:
where omega in the left and right hand side denotes the first resonant frequency of the actuator and the crossover frequency of the sensitivity function, respectively. For more details, please see [Ito et al., IEEE TMECH, 21(2), 2016].
Experimental results
In order to verify the proposed design guidelines of low-stiffness actuators, a Lorentz actuator of a CD/DVD pickup is compared as a low-stiffness actuator with a ring-bending piezo as a high-stiffness actuator. Fig. 2 is a photograph of these actuators.
Fig. 3 shows the positioning error of the actuators measured by a high-precision displacement sensor. When step-like disturbances of about 160 nm are given to the actuator base at t=0.01s, the piezo’s mover oscillates within a range of about +/- 200 nm. However, this oscillation can be successfully suppressed to +/- 10 nm by using the Lorentz actuator that satisfies the proposed design guidelines of low stiffness actuators.
In the succeeding projects (e.g. [Ito et at., Mechatronics, 44, 2017][Ito at al., Ultramicroscopy, 186, 2018]), low-stiffness actuators have been successfully applied to atomic force microscopy and high-speed long-stroke positioning, realizing nanometer-resolution positioning in vibrational environments without an external vibration isolator.
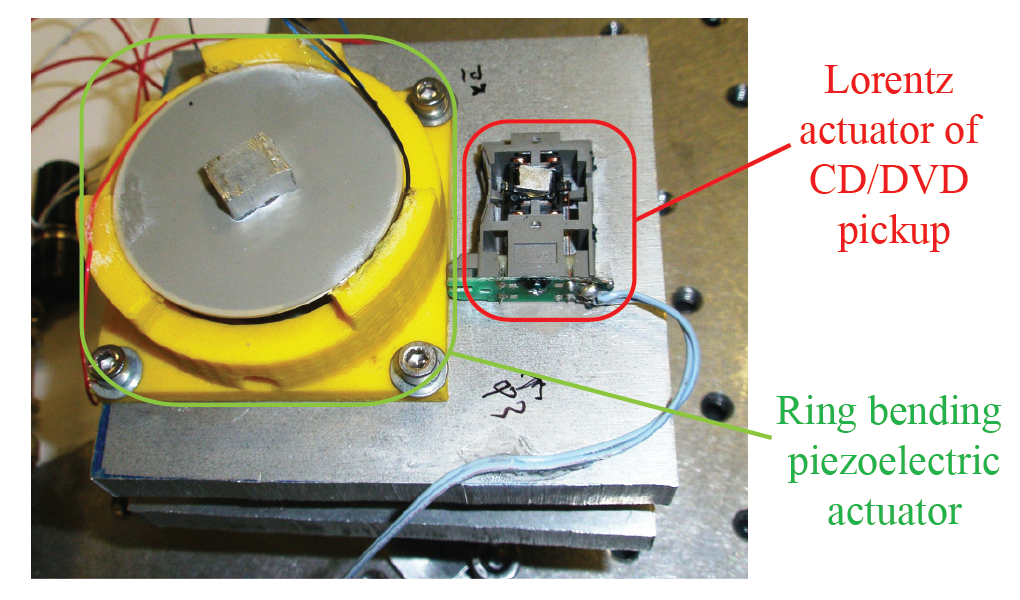
Lorentz actuator of a CD/DVD laser pickup and ring bending piezoelectric actuator, compared to verify the proposed design guidelines of the actuator classification [Ito et al., IEEE TMECH, 21(2), 2016].
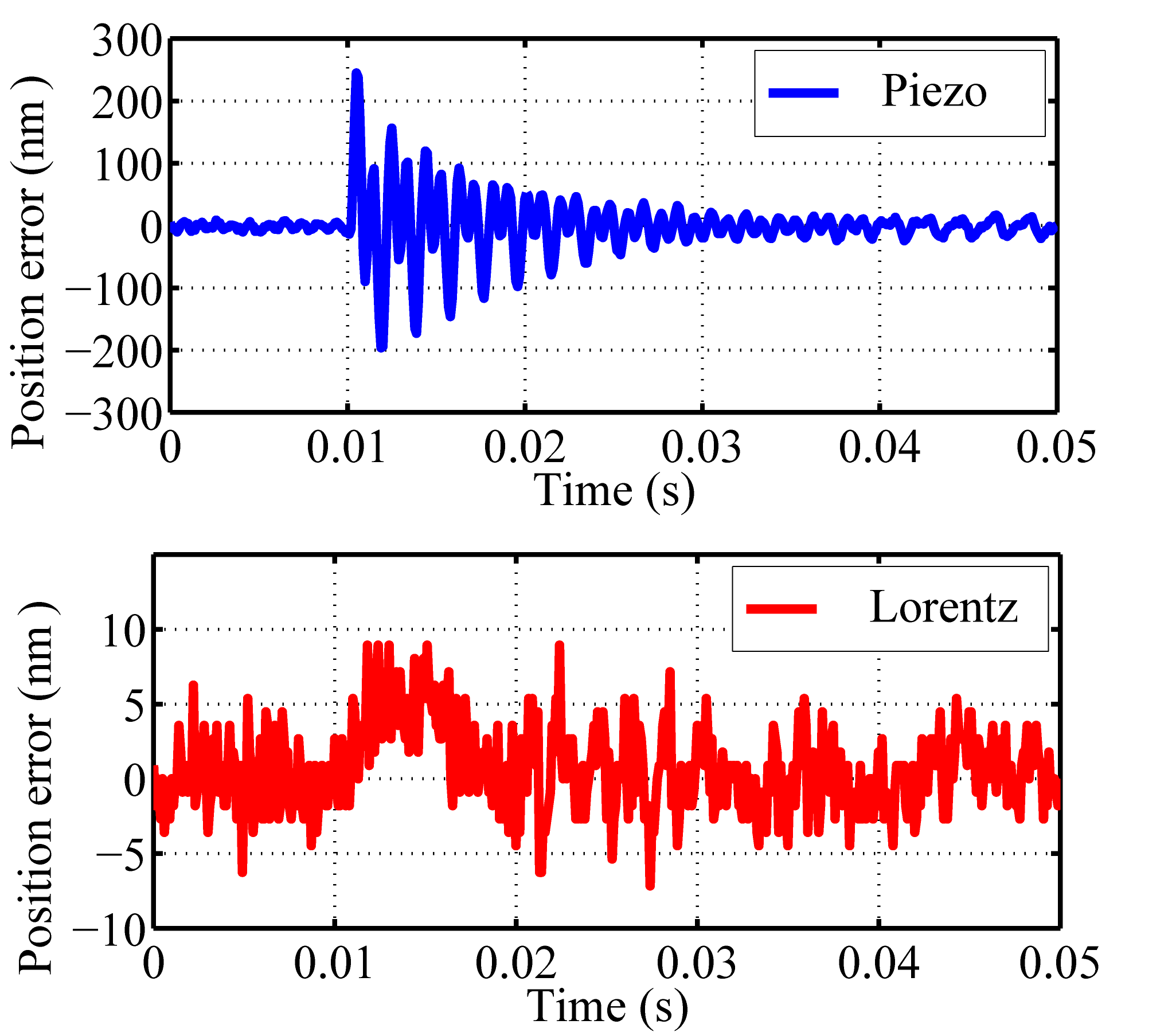
Measured positioning error when step-like disturbances of about 160 nm are applied to the actuator base: (top) ring bending piezo as a high-stiffness actuator and (bottom) Lorentz actuator as a low-stiffness actuator. Please see [Ito et al., IEEE TMECH, 21(2), 2016] for more details.
Applications
- Vibration isolation
- Dual stage actuators
- Nanopositioning stages
- Data storage devices (e.g. HDDs, CD/DVD)
- In-line and on-line metrology
- Atomic force microscopy
Related publications
Journal articles
- S. Ito, S. Unger, and G. Schitter, Vibration isolator carrying atomic force microscope’s head, Mechatronics, vol. 44, p. 32–41, 2017.
[BibTex] [Download]@Article{TUW-259386, Title = {Vibration isolator carrying atomic force microscope's head}, Author = {Ito, Shingo and Unger, Severin and Schitter, Georg}, Journal = {Mechatronics}, Year = {2017}, Pages = {32--41}, Volume = {44}, Doi = {10.1016/j.mechatronics.2017.04.008}, }
- S. Ito and G. Schitter, Comparison and Classification of High-precision Actuators Based on Stiffness Influencing Vibration Isolation, IEEE/ASME Transactions on Mechatronics, vol. 21(2), 2016.
[BibTex] [Download]@Article{TUW-241933, Title = {Comparison and Classification of High-precision Actuators Based on Stiffness Influencing Vibration Isolation}, Author = {Ito, Shingo and Schitter, Georg}, Journal = {IEEE/ASME Transactions on Mechatronics}, Year = {2016}, Volume = {21(2)}, Doi = {10.1109/TMECH.2015.2478658}, Keywords = {Motion control, actuators, vibrations}, Numpages = {10}, }
- S. Ito, J. Steininger, and G. Schitter, Low-stiffness Dual Stage Actuator for Long Rage Positioning with Nanometer Resolution, Mechatronics, vol. 29, p. 46–56, 2015.
[BibTex] [Download]@Article{TUW-240765, Title = {Low-stiffness Dual Stage Actuator for Long Rage Positioning with Nanometer Resolution}, Author = {Ito, Shingo and Steininger, J{\"u}rgen and Schitter, Georg}, Journal = {Mechatronics}, Year = {2015}, Pages = {46--56}, Volume = {29}, Doi = {10.1016/j.mechatronics.2015.05.007}, }
Selected conference publications
- S. Ito, F. Cigarini, S. Unger, and G. Schitter, Flexure design for precision positioning using low-stiffness actuators, in Proceedings of the 7th IFAC Symposium on Mechatronic Systems, 2016, p. 200–205.
[BibTex]@InProceedings{TUW-251121, Title = {Flexure design for precision positioning using low-stiffness actuators}, Author = {Ito, Shingo and Cigarini, Francesco and Unger, Severin and Schitter, Georg}, Booktitle = {Proceedings of the 7th IFAC Symposium on Mechatronic Systems}, Year = {2016}, Note = {Posterpr{\"a}sentation: 7th IFAC Symposium on Mechatronic Systems {\&} 15th Mechatronics Forum International Conference, Loughborough (Vereinigte K{\"o}nigreich); 2016-09-05 -- 2016-09-08}, Pages = {200--205}, Doi = {10.1016/j.ifacol.2016.10.548}, Keywords = {Flexure, Lorentz actuator, voice coil motor, precision positioning} }
Project partners
Funding
Contact
MAS, Dr.techn. Shingo ItoUniv.-Prof. Dipl.-Ing. Dr.sc.techn. Georg Schitter