Application of Curved Tapes on 3D Objects
Project focus
- Application of pre-cut tapes on freeform 3D surface
- Draping process with a defined normal force
- Traverse a tool along a surface-based path on a freeform 3D surface
Description
Robotic handling of deformable materials like, e. g. textiles, carbon and glass fiber fabrics, foils and paper, has been a challenging task in the industry for a long time, and has received great attention in research recently. Flexible automation on a human level has not yet been fully achieved for many handling tasks like, e. g., grasping, de-stacking and draping. The main challenges for the automated handling of deformable materials are their characteristics, in particular the nonlinear material behavior, the anisotropy, the diverse outer contours, the high dimensionality of the object state, and the wide range of material properties like porosity and density. In this context, many specialized mechatronic gripper solutions were implemented for grasping and transporting. However, high-mix and low-volume tasks require more flexible solutions.
This project presents a flexible approach for impedance-controlled wrinkle-free application of (curved) pre-cut adhesive tapes on freeform 3D surfaces. For this application, a surface-based path following control concept is developed, which provides a local coordinate frame based on the surface normal and the path tangent. Furthermore, the algorithms and solutions emerging from this application also represent a solution for a more general robotic problem, i. e. traversing a tool along a curved path on a freeform 3D surface with defined kinematic constraints.
The tape application process consists of the following steps and is depicted in Fig. 1:
- (a) 2D tape application path: A planar tape application path is created on the shape of the planar tape
- (b) 3D path mapping: The geometry and curvature of the planar tape application path is mapped onto the CAD model of the 3D object, which creates a 3D tape application path.
- (c) Robot starting pose: The tape application process is simulated to determine a suitable starting joint configuration for the robot which results in a collisionfree execution and has a reasonable reserve with respect to the joint limits.
- (d) Preparation and execution: The pre-cut tape is placed in the required starting position on the feed of the application tool and the robot performs the impedance-controlled tape application process.
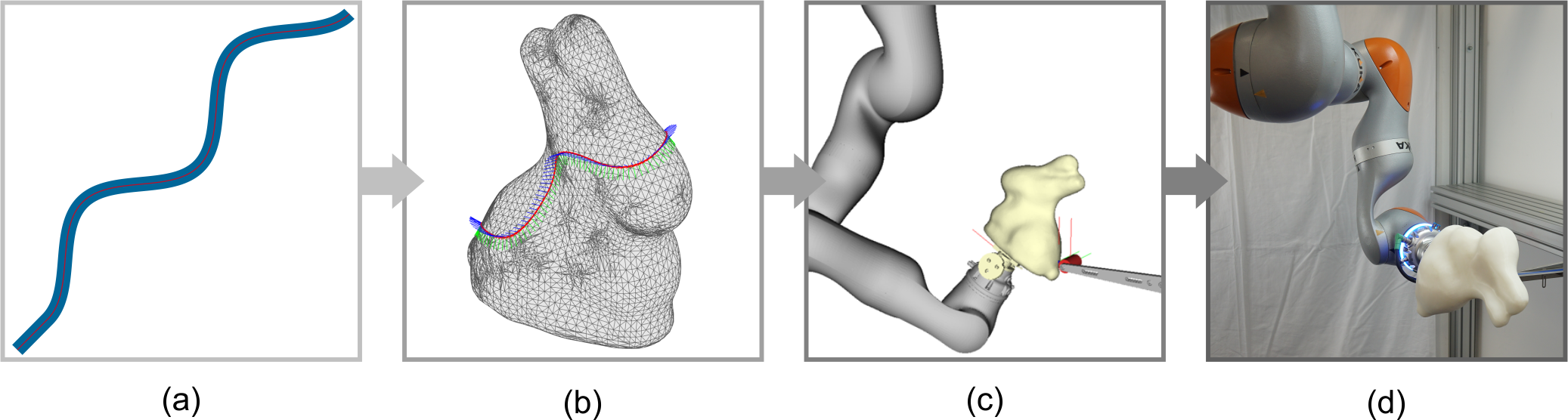
Tape application process overview: (a) 2D tape application path, (b) 3D path mapping, (c) Robot starting pose, (d) Preparation and execution.
The surface-based path following control concept is demonstrated on a 3D-printed object, as shown in Fig. 2: The paths of the pre-cut tapes in (a) are mapped onto the discrete surface of the 3D object in (b). The tape application result is depicted in (c).
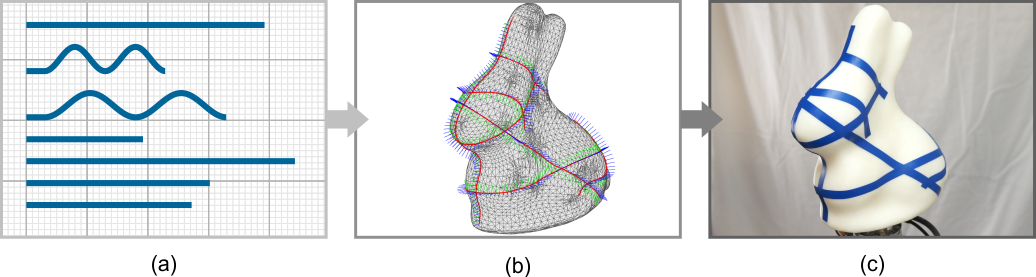
Experimental results of the tape application process on a 3D-printed object: (a) Pre-cut tapes (b) Projected paths on 3D object (c) Completed tape application
Videos
Selected publications
- T. Weingartshofer, M. Schwegel, C. Hartl-Nesic, T. Glück, and A. Kugi, Collaborative Synchronization of a 7-Axis Robot, in Proceedings of the 8th IFAC Symposium on Mechatronic Systems MECHATRONICS 2019, Vienna, Austria, 2019, pp. 507-512.
[BibTex]@InProceedings{Weingartshofer2019, author = {Weingartshofer, T. and Schwegel, M. and Hartl-Nesic, C. and Gl\"uck, T. and Kugi, A.}, title = {Collaborative Synchronization of a 7-Axis Robot}, booktitle = {Proceedings of the 8th IFAC Symposium on Mechatronic Systems MECHATRONICS 2019}, year = {2019}, volume = {52}, number = {15}, month = {9}, pages = {507-512}, doi = {10.1016/j.ifacol.2019.11.726}, address = {Vienna, Austria}, issn = {2405-8963}, } - C. Hartl-Nesic, B. Bischof, T. Glück, and A. Kugi, Pfadfolgeregelung mit Konzepten für den Pfadfortschritt: Ein Assemblierungsszenario, at – Automatisierungstechnik, vol. 68, iss. 1, p. 44–57, 2020.
[BibTex]@Article{Hartl-Nesic2020, author = {Hartl-Nesic, Christian and Bischof, Bernhard and Gl{\"u}ck, Tobias and Kugi, Andreas}, title = {Pfadfolgeregelung mit Konzepten für den Pfadfortschritt: Ein Assemblierungsszenario}, journal = {at -- Automatisierungstechnik}, year = {2020}, volume = {68}, number = {1}, pages = {44--57}, issn = {2196-677X}, doi = {10.1515/auto-2019-0114}, } - C. Hartl-Nesic, Surface-Based Path Following Control on Freeform 3D Objects, A. Kugi, K. Schlacher, and W. Kemmetmüller, Eds., Düren: Shaker Verlag, 2020, vol. 49.
[BibTex]@Book{HartlNesic2020, author = {Hartl-Nesic, C.}, title = {Surface-Based Path Following Control on Freeform 3D Objects}, editor = {A. Kugi and K. Schlacher and W. Kemmetm\"uller}, isbn = {978-3-8440-7637-0}, publisher = {Shaker Verlag}, series = {Modellierung und Regelung komplexer dynamischer Systeme}, volume = {49}, address = {D\"uren}, organization = {Institute f{\"u}r Automatisierungs- und Regelungstechnik (TU Wien) und Regelungstechnik und Prozessautomatisierung (JKU Linz)}, year = {2020}, } - C. Hartl-Nesic, T. Glück, and A. Kugi, Surface-Based Path Following Control: Application of Curved Tapes on 3-D Objects, IEEE Transactions on Robotics, vol. 37, iss. 2, p. 615–626, 2021.
[BibTex] [Download]@Article{HartlNesic2021, author = {Hartl-Nesic, Ch. and Gl{\"u}ck, T. and Kugi, A.}, title = {Surface-Based Path Following Control: Application of Curved Tapes on 3-D Objects}, doi = {10.1109/TRO.2020.3033721}, issn = {1552-3098}, number = {2}, pages = {615--626}, volume = {37}, journal = {IEEE Transactions on Robotics}, year = {2021}, }
Applications
- Textile/garment industry
- Fiber reinforced plastics industry
- Food industry