09.10.2025 CORIM: Collaborative Robots for Impact-Based Manipulation (ERC PoC Grant)
The CORIM project aims to introduce a technology that has the potential to significantly expand the application area of collaborative robots (cobots) in the manufacturing sector. Today’s collaborative robots have limited ability to handle tasks that require rapid contact transitions with stiff environments, since the force peaks emerging from the contact transition endanger key elements such as gears and force sensors in the collaborative robots. Based on findings of the ERC project NatDyReL, we will develop a solution for these applications, which is based on two main components: a method for analysis and planning fast contact transitions, and an end effector for contact tasks. In connection with the motion planning, which takes the impact models and the inertial couplings into account, this end-effector allows to protect the robot wrist from the impulsive contact forces. Building on this core idea, CORIM enable a conventional collaborative robot to perform physically demanding harsh applications such as hammering, denting, and punching. The CORIM concept will allow to significantly broaden the application area of cobots in the manufacturing industry. In addition to the technical feasibility study, we will perform a business feasibility study as a preparation of further commercialization steps.
Fördergeber
Consolidator Research Grant des Europäischen Forschungsrates (ERC).
04.08.2025 Qualitätsregelung von Spritzgießmaschinen
Projektschwerpunkte
- Datengetriebene Modellierung der Bauteilqualität unter Berücksichtigung visueller Qualitätsinspektion
- Iterative Regelungsstrategien für eine stabile und hochwertige Produktion
- Optimierung der Zykluszeit unter Qualitäts- und Robustheitsvorgaben
Beschreibung
Spritzgießen ist eines der am weitesten verbreiteten Herstellungsverfahren zur Produktion großer Stückzahlen von Kunststoffbauteilen. Trotz seiner Allgegenwärtigkeit bleibt die Sicherstellung einer konstanten Produktqualität eine Herausforderung, da der Prozess hochgradig nichtlinear ist und empfindlich auf Umgebungsbedingungen sowie Materialschwankungen reagiert.

Foto einer Spritzgießmaschine
Dieses Forschungsprojekt, das in Zusammenarbeit mit dem Industriepartner Center for Vision, Automation & Control, AIT Austrian Institute of Technology GmbH, durchgeführt wird, adressiert den Bedarf an hochpräziser, automatisierter Qualitätsregelung im Spritzgießen. Der Schwerpunkt liegt auf der Entwicklung fortschrittlicher datengetriebener Methoden, um eine konsistente Produktqualität und optimale Zykluszeiten zu erreichen – zwei entscheidende Faktoren in der modernen Fertigung.
Im Rahmen des Projekts werden Machine-Learning-Modelle entwickelt, die die Bauteilqualität vorhersagen und die Beziehung zwischen physischen Prozessdaten (z. B. Kavitätsdruck) und visueller Rückmeldung herstellen. Diese Modelle unterstützen die Echtzeit-Qualitätsregelung von Zyklus zu Zyklus und gehen über die herkömmlichen, auf dem Gewicht basierenden Kriterien hinaus. Durch den Einsatz von Iterativ Lernender Regelung (Iterative Learning Control, ILC) kann sich der Prozess an wechselnde Bedingungen über die Zyklen hinweg anpassen, wodurch die Abhängigkeit vom Bediener reduziert wird.
Darüber hinaus untersucht das Projekt die Optimierung der Zykluszeit unter Qualitätsvorgaben, um Effizienz zu gewährleisten, ohne die Robustheit zu beeinträchtigen. Die Kombination aus datengetriebener Modellierung und repetitiver Regelung ermöglicht einen zuverlässigeren und autonomeren Spritzgießprozess.
Dieses Projekt trägt zum Übergang von bedienerabhängiger Prozessoptimierung hin zu automatisierter, intelligenter Qualitätsregelung im Spritzgießen bei. Durch die Kombination von Machine Learning und Regelungstechnik ermöglichen wir eine robuste, schnelle und verlässliche Produktion, selbst unter variablen Umgebungs- und Materialbedingungen.
Projektpartner
27.05.2025 Modellierung und hochgenaue Regelung eines Permanentmagnet-Linearsynchronmotors
Projektfokus
- Modellierung von Permanentmagnet-Linearsynchronmotoren bestehend aus gekrümmten Segmenten
- Energieeffiziente, hochpräzise Positionsregelung
- Hochgenauer Betrieb mehrerer Shuttles in geringem Abstand
Beschreibung
Permanentmagnet-Linearsynchronmotoren (PMLSMs) sind Schlüsseltechnologien in der modernen Industrieautomation – insbesondere in Transport- und Fertigungssystemen, die höchste Anforderungen an Dynamik, Präzision und Flexibilität stellen. Ihr besonderes Design ermöglicht den simultanen Betrieb mehrerer beweglicher Einheiten – sogenannter Shuttles oder Movers – auf einem gemeinsamen Motor. Dadurch wird eine unabhängige, hochdynamische Bewegungssteuerung realisierbar. Zudem erlaubt der modulare Aufbau mit segmentierten Statoren die Umsetzung komplexer Geometrien, beispielsweise durch die Kombination gerader und gekrümmter Segmente. Dies eröffnet neue Gestaltungsmöglichkeiten für innovative Fertigungs- und Transportsysteme.
Für die effiziente Regelung von PMLSMs ist ein genaues mathematisches Modell entscheidend. In diesem Projekt wurde ein Reluktanzmodell (MEC) entwickelt, das auch beliebig gekrümmte Motorgeometrien abbilden kann. Es vereint hohe Genauigkeit mit effizienter Berechenbarkeit. Zur weiteren Verbesserung der Modellgenauigkeit kommt ein Kalibrierungsverfahren zum Einsatz, das auf Messdaten eines eigens entwickelten Prüfstands basiert (siehe Abb. 1).
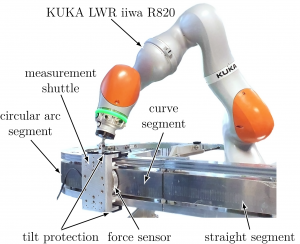
Prüfstand zur Modellkalibrierung.
Auf Basis des entwickelten Modells werden optimierte Strommuster berechnet, die gezielt die gewünschte Vortriebskraft auf die Shuttles erzeugen. Diese modellbasierte Stromoptimierung nutzt gezielt die Freiheitsgrade des Systems zur Minimierung ohmscher Verluste und ermöglicht so einen energieeffizienten Betrieb. Die Bewegungssteuerung erfolgt über einen überlagerten Positionsregler mit zwei Freiheitsgraden. Um die Regelgüte – insbesondere an Segmentübergängen – weiter zu steigern, wird eine iterativ lernende Regelung (ILC) ergänzt. Dadurch lassen sich auch Einflüsse durch Fertigungs- oder Montageabweichungen wirkungsvoll kompensieren.
Beim gleichzeitigen Betrieb mehrerer Shuttles in geringem Abstand treten zusätzliche Herausforderungen auf – etwa überlappende Strommuster oder magnetische Wechselwirkungen zwischen benachbarten Permanentmagneten. Im Rahmen des Projekts wurde eine hochpräzise Positionsregelung entwickelt, die auch bei variablen oder minimalen Shuttleabständen zuverlässige Ergebnisse liefert.
Die entwickelten Modelle und Regelstrategien wurden erfolgreich an einem Prüfstand validiert und zeigen exzellente Ergebnisse. Ein Video, das ausgewählte Ergebnisse zeigt, ist unten beigefügt. Weitere technische Details sind den referenzierten Publikationen zu entnehmen.
Video
Ausgewählte Publikationen
- G. Fuchs, A. Kugi, and W. Kemmetmüller, Magnetic equivalent circuit modeling of a permanent magnet linear synchronous motor composed of curved segments, Mechatronics, vol. 104, p. 103256, 2024.
[BibTex]@Article{Fuchs2024, author = {Fuchs, G. and Kugi, A. and Kemmetm\"uller, W.}, journaltitle = {Mechatronics}, title = {Magnetic equivalent circuit modeling of a permanent magnet linear synchronous motor composed of curved segments}, doi = {10.1016/j.mechatronics.2024.103256}, issn = {0957-4158}, pages = {103256}, volume = {104}, journal = {Mechatronics}, year = {2024}, } - G. Fuchs, A. Deutschmann-Olek, A. Kugi, and W. Kemmetmüller, Iterative learning-based online calibration of a position sensor system for permanent magnet linear synchronous motors, in Proceedings of the IECON 2024 – 50th Annual Conference of the IEEE Industrial Electronics Society, Chicago, USA, 2024, p. 1–8.
[BibTex]@InProceedings{Fuchs2024a, author = {Fuchs, G. and Deutschmann-Olek, A. and Kugi, A. and Kemmetm\"uller, W.}, booktitle = {Proceedings of the IECON 2024 - 50th Annual Conference of the IEEE Industrial Electronics Society}, title = {Iterative learning-based online calibration of a position sensor system for permanent magnet linear synchronous motors}, doi = {10.1109/IECON55916.2024.10905609}, pages = {1--8}, publisher = {IEEE}, address = {Chicago, USA}, year = {2024}, } - G. Fuchs, A. Deutschmann-Olek, A. Kugi, and W. Kemmetmüller, High-precision tracking control of a segmented stator permanent magnet linear synchronous motor, IEEE Transactions on Power Electronics, p. 1–12, 2025.
[BibTex]@Article{Fuchs2025, author = {Fuchs, G. and Deutschmann-Olek, A. and Kugi, A. and Kemmetm\"uller, W.}, date = {2025}, title = {High-precision tracking control of a segmented stator permanent magnet linear synchronous motor}, doi = {10.1109/TPEL.2025.3579258}, issn = {1941-0107}, pages = {1--12}, journal = {IEEE Transactions on Power Electronics}, publisher = {Institute of Electrical and Electronics Engineers (IEEE)}, year = {2025}, }
Projektpartner
B&R Industrial Automation GmbH
16.02.2025 LunarAssembly
Jüngste wissenschaftliche Entdeckungen über das Vorhandensein von Wassereis auf dem Mond haben zu einem größeren Interesse an Mondmissionen geführt. Für den Bau und die Wartung zukünftiger Mondbasen werden Robotertechnologien von entscheidender Bedeutung sein. Die Teleoperation von Robotersystemen ist eine etablierte Technologie, die es einem Bediener ermöglicht, einen Roboter von einer entfernten Bedienerstation aus zu steuern. Der Grad der Immersion des Bedieners in die entfernte Szene kann durch den Einsatz von haptischem Feedback deutlich erhöht werden. Allerdings kommt es bei der Teleoperation eines Roboters auf dem Mond von der Erde zu erheblichen Zeitverzögerungen in der Größenordnung von mehreren Sekunden, die den Einsatz heutiger Teleoperationstechnologien in solchen Szenarien verhindern. Während wirksame Steuerungsmethoden verfügbar sind um Signalverzögerungen von bis zu ~1 Sekunde zu bewältigen, nimmt die Leistung dieser Algorithmen mit längeren Verzögerungen drastisch ab.
Das LunarAssembly-Projekt befasst sich somit mit einer grundlegenden wissenschaftlichen Herausforderung, nämlich der Teleoperation von Robotersystemen unter großen Zeitverzögerungen, motiviert durch ein Szenario der Fernmontage auf dem Mond. Wir glauben, dass solch lange Signalverzögerungen neue Paradigmen für die Teleoperation erfordern, mit einem angemessenen Zusammenspiel zwischen autonomen Funktionen und menschlichem Eingreifen.
Projektpartner:
- ACIN Robotic Systems Lab (TU Wien)
- ICT Autonomous Systems Lab (TU Wien)
- Space Robotics Research Group, SnT, University of Luxembourg
Fördergeber:
Österreichischer Wissenschaftsfonds (FWF)
08.01.2025 Caring Robots // Robotic Care
Unser Ziel ist es, Robotik-Technologie in der Pflege neu zu denken, indem wir eine Technologie entwickeln, die nützlich, sicher, sinnvoll und gewünscht ist, und zwar durch einen Designprozess, der Pfleger:Innen, Menschen in der Pflege, Pflegeorganisationen und andere Interessengruppen einbezieht. Das Projekt Caring Robots // Robotic Care ist eine transdisziplinäre Forschungskooperation zwischen der TU Wien, der IT:U Interdisciplinary Transformation University Austria, der Caritas Wien und dem Technischen Museum Wien.
Die Entwicklung von Robotern für den Einsatz in der Pflege ist ein vieldiskutiertes Szenario, das stark polarisiert. Auf der einen Seite steht die Hoffnung, dass die (Roboter-)Technologie hilft, die Herausforderungen des demografischen Wandels zu meistern, Pflegende zu unterstützen und Menschen zu einem selbstbestimmten Leben zu verhelfen. Auf der anderen Seite steht die Befürchtung, dass Roboter die menschliche Pflege ersetzen und pflegebedürftige Menschen ins soziale Abseits drängen. Ziel dieses Projekts ist es, mögliche und wünschenswerte Rollen von Robotern oder ähnlichen Technologien im komplexen Kontext der Pflege zu erforschen. Wir wollen ein breites Spektrum von Akteuren – Pflegekräfte, Klienten, Interessengruppen, Nutzer und politische Entscheidungsträger – mit Expert:Innen aus den Bereichen Robotik, Informatik und Soziologie zusammenbringen, um gemeinsam die Frage zu stellen, wie Technologie die Zukunft der Pflege verändern kann und sollte (oder auch nicht).
08.01.2025 MANiBOT
MANiBOT aims to empower bi-manual, mobile, service robots with superior physical capabilities able to perform a wide variety of manipulation tasks, with highly diverse objects, in a human-like manner and performance, in diverse, challenging environments.
The project seeks to revolutionise the robotics landscape by enhancing robot’s handling skills, including simple grasping, pick-and-place operations, bi-manual and non-prehensile manipulation, and ensuring adaptive responses to changing environments or to the properties of objects.
To achieve these capabilities, innovations will be developed in the fields of advanced environment understanding, efficient manipulation techniques, robot cognitive functions and physical intelligence. The researchers will implement their solutions with a focus on baggage handling and supermarket shelves’ restocking, with piloting of robots in relevant environments.
Partners:
Centre for Research and Technology Hellas
Fraport Greece
TWI Hellas
University of Bristol
BioRobotics Institute of Sant’Anna School of Advanced Studies
Central Institute for Labour Protection – National Research Institute (CIOP-PIB)
Diamantis Masoutis SA
Asea Brown Boveri SA (ABB)
Aristotle University of Thessaloniki
The Technical University of Darmstadt
Schwarz Digits
The University of Burgos (UBU)
08.01.2025 TraceBot
Today manual procedures still dominate when it comes to creating and testing new healthcare products. This is because regulations require certainty in the execution of each process step and systematic checking to verify task completion, known as traceability. A particular challenge in this field is the handling of sterile medical products. Lab automation with dexterous and reasoning robots is the solution.
The EU funded TraceBot project aims at addressing healthcare-related processes, and more exactly the membrane-based sterility testing process. The objective of TraceBot is to bring verifiable actions to robot manipulation by reasoning over sensor-actor trails in a traceability framework based on digital-twin technology and extend current robot motion planners with the automatic execution of self-checking procedures that create a semantic trace of the actions performed. The goal is to create robotic systems able to understand what they perceive and do, to ensure that any manipulation action is verified, thus meeting the needs of the regulated environment.
The TraceBot project brings together six strong partners from five countries: Astech Projects Limited (England), Commissariat à l‘Energie Atomique et aux Energies Alternatives (France), Fundación Tecnalia Research & Innovation (Spain), Invite GmbH (Germany), Technische Universität Wien (Austria) and Universität Bremen (Germany) and is being guided by representatives of the pharmaceutical industry. Each partner contributes its own expertise by providing a solution working hand-in-hand with each other partner’s solution. This cooperation will permit the development of tactile grippers for handling medical products, the design of a set of manipulation skills to execute the regulatory checking actions for every assembly step, the generation of an intuitive programming method for a quick adaptation to novel products and tasks and, last but not least, the development of a reasoning framework to monitor and control the safe and failure-resistant operation of the robot system, in order to meet the need of safety-critical automation. The TraceBot project’s coordination, communication and dissemination is carried out by the health network BioLAGO (Germany).
08.01.2025 iChores
iChores ist ein internationales Forschungsprojekt mit dem Ziel, kollaborative Mensch-Roboter-Schnittstellen für intuitive Interaktion über mehrere Modalitäten zu schaffen.
Unsere Forschung konzentriert sich darauf Methoden zu finden, die es einem kollaborierenden Roboter ermöglichen, relevante Informationen aus den Blicken und Gesten eines menschlichen Partners zu extrahieren.
Dabei wollen wir erforschen wie Blick-, Gesten-, und Sprachinformationen für eine natürlichere und intuitivere Schnittstelle kombiniert werden können.
Wir verwenden eine benutzerzentrierte Designmethodik und erstellen Forschungsfragen und Hypothesen hinsichtlich der Auswirkungen der Kombination von Modalitäten auf das Verständnis des Roboters in Bezug auf Fehler, Dauer, und Benutzererfahrung während der Mensch-Maschine Interaktion.
Partner:
Czech Technical University in Prague, Czech Institute of Informatics Robotics and Cybernetics
Jagiellonian University in Cracow, Institute of Philisophy
09.08.2024 Development of the AI-based autonomous task planning and robot teaching solution for highly complex manufacturing assembly process
In dem Projekt werden komplexe Manipulationsfähigkeiten für zweiarmige Roboter entwickelt. Die Anwendungen liegen im Bereich der industriellen Fertigung und Montage.
Projektpartner
- KIMM (Koordinator)
- KITECH
- KAERI
- KETI
- KIRO
- KAIST
- Lline
- TU Wien
Fördergeber
Südkoreanisches Ministerium für Handel, Industrie, und Energie (MOTIE)
09.08.2024 TUW/DLR Joint Laboratory on Human Centered Robotics
Das „TUW-DLR Joint Laboratory on Human Centered Robotics“ ist ein virtuelles Kompetenzzentrum zwischen der Technischen Universität Wien und dem Deutschen Zentrum für Luft- und Raumfahrt (DLR e.V.). Die Mission des Joint Labs besteht in der Durchführung international führender Forschungsarbeiten im Bereich der “Human Centered Robotics” mit einem Fokus auf Echtzeitregelung maschinellem Lernen in der Mensch-Roboter-Interaktion. Die derzeitigen Forschungsaktivitäten im Rahmen des Joint Labs sind in die folgenden Themenbereiche gegliedert:
- Agile beinbasierte Fortbewegung
- Nachgiebige Gesamtkörperregelung für Manipulatoren mit freifliegender Basis
- Mensch-Roboter-Interaktion
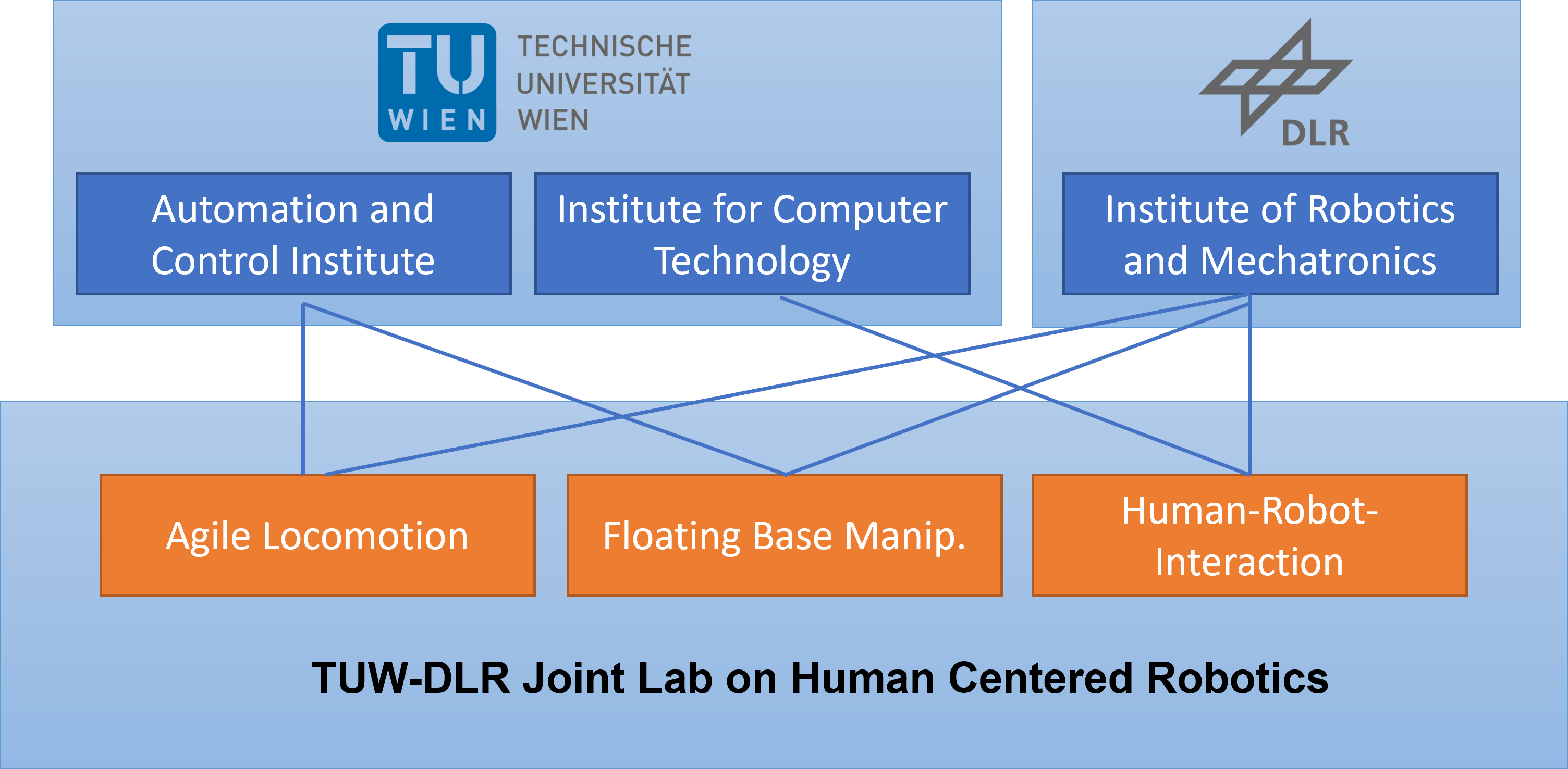
Beteiligte Einrichtungen:
- Robotic Systems Lab im Institut für Automatisierungs- und Regelungstechnik (ACIN), TU Wien
- Autonomous Systems Lab im Institut für Computertechnik (ICT), TU Wien
- Institute für Robotik und Mechatronik (RM) am Deutschen Zentrum für Luft- und Raumfahrt (DLR e.V.)