Mechatronic Design & System Integration
Mechatronische Systemintegration
Our research activities in the field of mechatronic design and system integration aim towards the development of an integrated systems design approach, including theoretical aspects and advanced control methods, for precision motion systems, mechatronic imaging and measurement systems, as well as for modular robotic systems. Integrated system design and advanced control will play an important role in future technology, where increasing demands on highest precision and throughput require advanced mechatronic designs and highly sophisticated controllers.
In this area we develop methods to systematically analyze, model, and synthesize the interplay between process design and control design. Already at the system design phase all components involved in the specific application have to be considered. Examples for these components are the mechanical structure of the device as well as the power amplifiers, the actuators, the sensors, the control system, and the eventual application. Further requirements may be modular system design, the potential of re-usability of individual sub-systems, and re-configurability of the overall integrated system. Simultaneously most of the future applications demand a low cost and robust implementation.
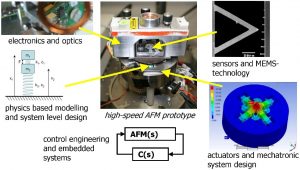
Integrated mechatronic design of a high-speed atomic force microscope (AFM) for imaging 1000-times faster than with conventional AFMs.
These challenges are inherent in various application domains that have been identified in our research and that we address in the neighboring research fields of scientific imaging systems and precision motion systems, including:
- Nano-metrology for materials and life sciences as well as for nano-scale production,
- Scanning-based optical metrology, LiDar, and 3D optical measurement systems,
- Adaptive optics and satellite ranging for free-space communication,
- Precision positioning and motion control for applications in the high-tech industry and scientific instrumentation.
We focus on the development of an integrated mechatronic design approach, which already at the concept design of the mechatronic system allows optimizing the tradeoff between process design and control design. This holistic systems view tackles the main challenges of the selected application domains head on, and will also help mechatronic system designers in the future to overcome limitations that might result from module and component-based designs.
Research projects on Mechatronic Design & System Integration