ConvoyFence
Title
Active vibration isolation platform for mobile drone identification systems for the protection of vehicle convoys
Project goals
- Design and implementation of a scalable multi-degree-of-freedom vibration isolation platform for mobile drone detection and identification
- Integration and control of the platform and the optical drone tracking and identification system developed in OptoFence II
Description
In recent years, drones and other types of unmanned aerial vehicles (UAVs) have gained massive importance in both the private and professional sectors. Correct identification of UAVs is essential for public safety, especially during major events. Due to technological advances, the detection, tracking, identification and defense of UAVs poses enormous challenges to modern drone interception systems. Optical drone reconnaissance systems are susceptible to vibrations and unstable surfaces, especially in mobile environments, due to the high magnifications as well as the high tracking speeds required to identify approaching objects.
Nevertheless, they are the backbone of a modern, multispectral drone detection system, as only the timely provision of high-resolution imagery enables appropriate and rapid decision-making to protect a troop transport or convoy. Thus, a universally applicable technical solution is needed to make optical drone reconnaissance systems, as well as other directed detection systems, “mobile” and to ensure the protection of people and vehicles even when they are on the move.
Construction of the targeted mobile vibration isolation platform for drone reconnaissance for operation in motion and stationary.
This project aims to develop a modular vibration isolation platform that enables the mobile deployment of optical drone reconnaissance systems. Mechatronic system design and state-of-the-art control technology ensure the required decoupling and stabilization of the sensor systems even while the vehicle is in motion (Fig. 1).
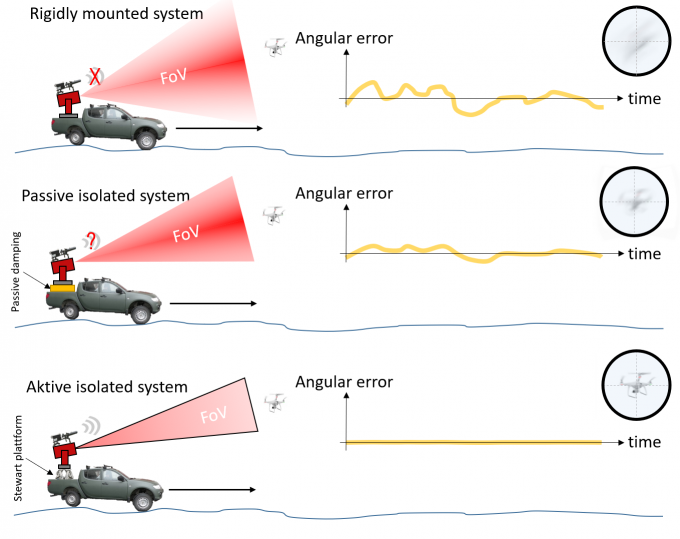
As shown in Fig. 2, a rigidly mounted system in mobile use leads to a considerable angular error of the optical detection system and correct UAV identification is thus made impossible. Although vibration amplitudes can be attenuated by additional passive isolation, telescope tracking and image stability are still limited.
Combination of the telescope system from “Optofence II” with the active vibration isolation platform integrating different sensor systems.
Only through active vibration suppression by means of an actuated platform detection of vibrations by suitable sensors as well as advanced control strategy the necessary tracking accuracy as well as image smoothness can be achieved. A block diagram of the planned control structure for vibration isolation is shown in Figure 3. Only the combination of feedback and feedforward control enables a low-vibration environment in mobile use for the operation of the drone identification system from Optofence II.
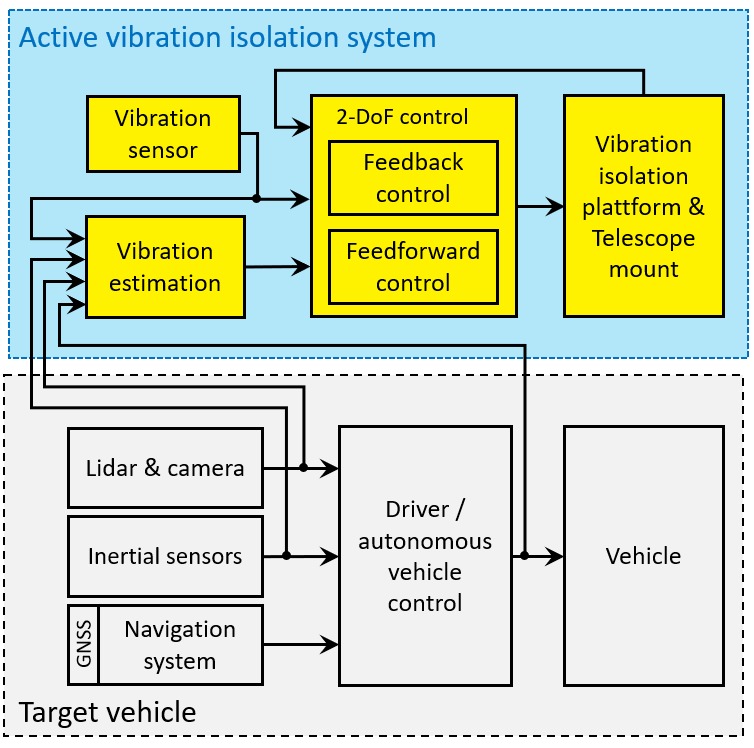
Block diagram of a predictive vibration compensation system with 2-degree-of-freedom control structure and integration of existing vehicle sensors.
By closely coordinating the platform with the development of a high-performance telescope system for drone identification from the complementary project “OptoFenceII”, a direct link is established to the project results and an overall more powerful, flexible and, above all, mobile drone reconnaissance system is created (Fig.4).
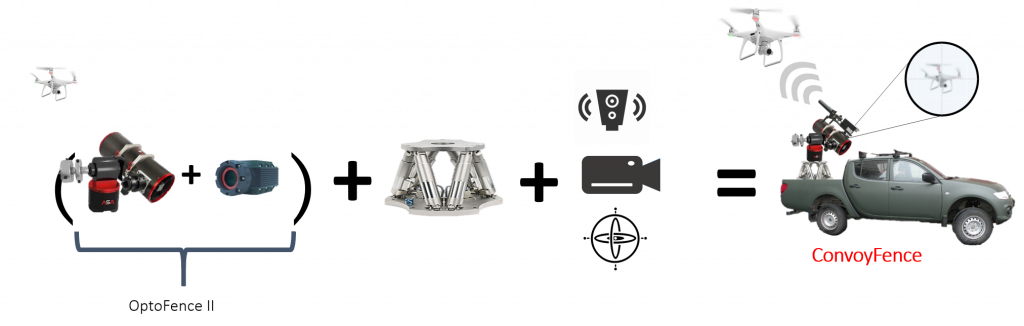
Combination of the telescope system from “Optofence II” with the active vibration isolation platform integrating different sensor systems.
Applications
- Vibration isolation platform for mobile applications
- Drone tracking and identification
- Optical communication
Project partners
- ASA Astrosysteme GmbH
- Austrian Federal Ministry of Defence
Funding
This project is funded by the Austrian defense research programme FORTE of the Federal Ministry of Agriculture, Regions and Tourism (BMLRT).

Contact
Univ.-Prof. Dipl.-Ing. Dr.sc.techn. Georg SchitterDipl.-Ing. Andreas Sinn
Project Staff
Dipl.-Ing. BSc. Christian HaiderDipl.-Ing. BSc Christopher Naverschnigg
Dipl.-Ing. BSc. Denis Ojdanic
Time
2021 - 2024Status
ongoingRelated Projects
- OptoFence II
- TracSat
- Atomic Force Microscopy capable of vibration isolation (Vibrostop AFM)
- Automated in-line metrology for nanopositioning systems (aim4np)
Further Links
https://www.bundesheer.at/sk/lusk/flflats/index.shtml
Open Positions
The AMS group offers vacant positions at PhD and PostDoc level