ERC NatDyReL (Utilizing Natural Dynamics for Reliable Legged Locomotion)
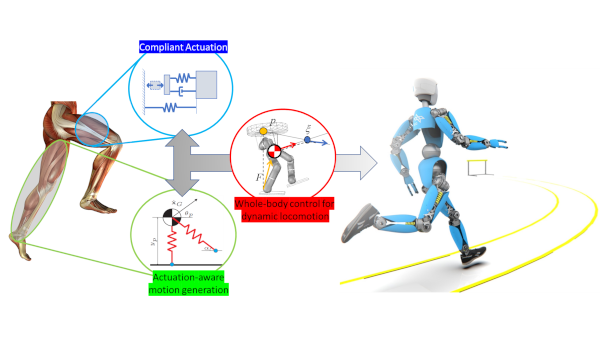
Das NatDyReL-Projekt (Utilizing Natural Dynamics for Reliable Legged Locomotion) zielt auf einen grundlegenden Paradigmenwechsel bei der Konstruktion und Steuerung von humanoiden Robotern ab. Dies ebnet den Weg für eine neue Generation von intrinsisch nachgiebigen Robotern, die in der Lage sind, ihre Open-Loop-Aktorimpedanz in Echtzeit an die Aufgabe anzupassen.
Projektdetails
Im Gegensatz zu der inzwischen ausgereiften Technologie der drehmomentgeregelten Antriebe werden die in NatDyReL entwickelten Roboter eine aktive Anpassung der dynamischen Antriebseigenschaften (z.B. Steifigkeit & Dämpfung) erlauben. Dadurch kann der Roboter sein dynamisches Verhalten zur Laufzeit an die aktuellen Bodenverhältnisse bzw. die gewünschte Schrittgeschwindigkeit anpassen. Zusätzlich kann bei jedem Schritt ein Teil der kinetischen Energie in den elastischen Antrieben zwischengespeichert werden, wodurch eine energieeffiziente Ausführung von dynamischen Laufbewegungen ermöglicht wird. Um diese Konzepte in der Praxis erfolgreich umzusetzen, ist es erforderlich, die nachgiebige Antriebsdynamik sowohl bei der Planung der Gesamtkörperbewegung als auch bei der Echtzeitsteuerung vollständig zu berücksichtigen. Das Projekt erfordert somit eine enge interdisziplinäre Zusammenarbeit von Experten aus verschiedenen Disziplinen, insbesondere aus der Robotik, Regelungstechnik und Mechatronik.
Zwischenergebnisse
Simulation des NatDyReL-Roboters bei einer Laufbewegung mit 4m/s. Die Bewegungen wurden mit einem passivitätsbasierten Gesamtkörperregler generiert, wobei die erforderlichen Kontaktkräfte aus dem BID-Framework („Biologically-Inspired Dead-beat control“) berechnet wurden.
Diese Simulation zeigt eine Laufbewegung mit einer Geschwindigkeit von 3 m/s. Die Bewegung wurde auf eine minimale Motorleistung optimiert.
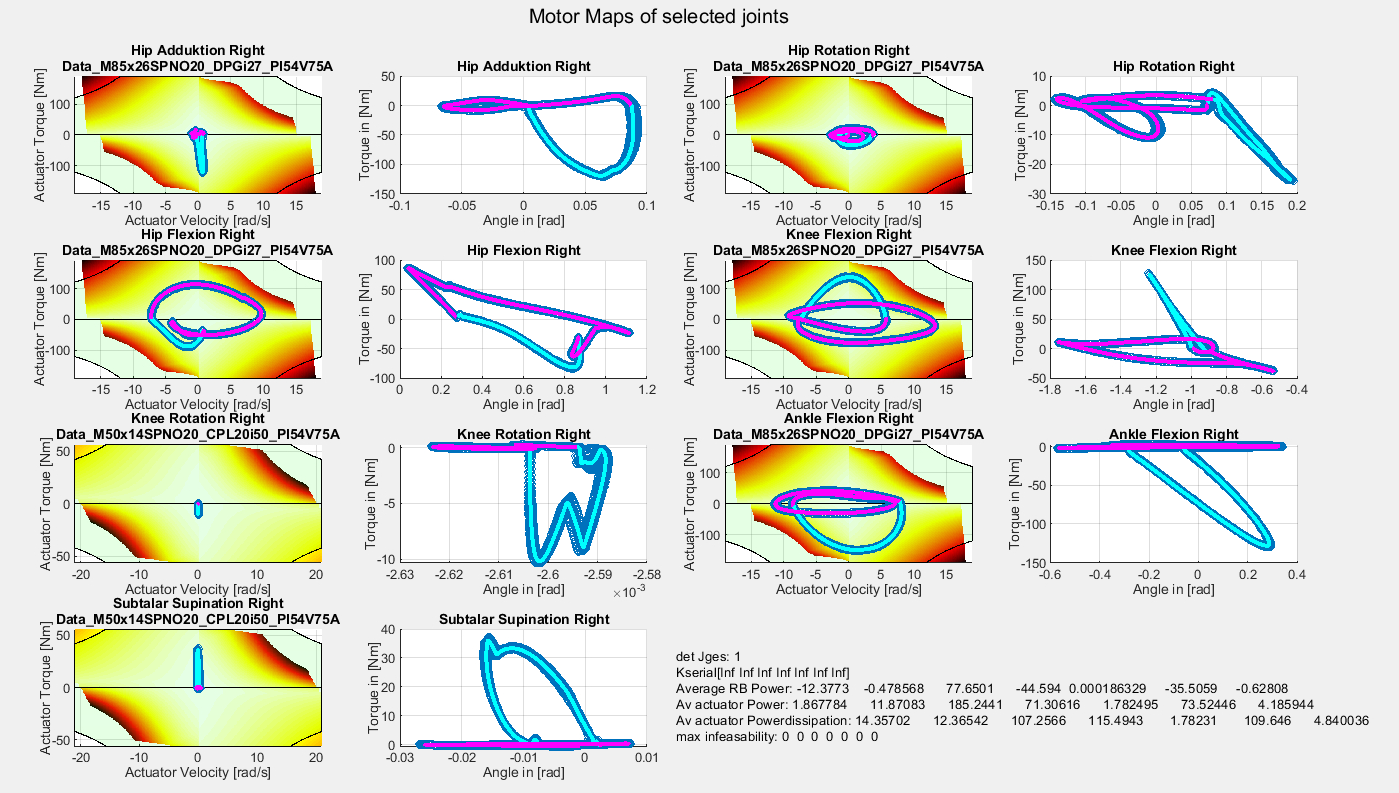
Die resultierenden Motorgeschwindigkeiten und Drehmomente werden im zulässigen Bereich optimiert.
Forschungsfragen
Mit der in den vier Arbeitspaketen durchgeführten Forschung wollen wir die folgenden grundlegenden wissenschaftlichen Fragen beantworten:
- Wie können energieeffiziente Gänge und hochperformante Ganzkörperbewegungen für stark nachgiebige Beinroboter entworfen werden?[WP2]
- Wie lassen sich dynamische Kontaktübergänge während Multikontakt-Bewegungen realisieren? [WP3]
- Wie lassen sich all diese Bewegungen durch Regelungsansätze robust stabilisieren? [WP2-3]
- Wie kann die intrinsische Impedanzcharakteristik an Unsicherheiten und Variabilität der Körperdynamik oder der Umgebung des Roboters angepasst werden? [WP2]
- Wie können die Körperstruktur und das Antriebssystem humanoider Roboter gestaltet werden, um eine Balance zwischen den Anforderungen an Energieeffizienz, Robustheit und Leistung in Bezug auf Geschwindigkeit zu erzielen? [WP4]
Projektstruktur
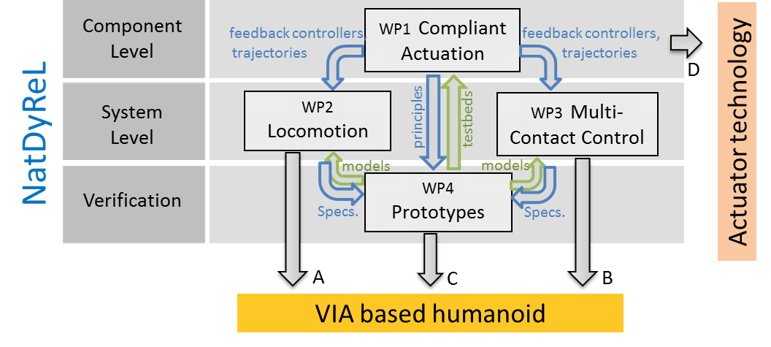
AP1: Grundlagen zur Regelung von Robotern mit elastischen Antrieben
AP2: Energieeffiziente Bewegung
AP3: Multikontakt-Regelung
AP4: Prototypenentwicklung
Partner
- TU Wien (Koordinator)
- Institut für Robotik und Mechatronik, Deutsches Zentrum für Luft- und Raumfahrt (DLR e.V.)
Funding
Consolidator Research Grant des Europäischen Forschungsrates (ERC).
Ansprechpartner
Univ.Prof. Dr.-Ing. Dipl.-Ing. Christian OttProjektmitarbeiterInnen
MSc Tobias EgleMSc Sait Sovukluk