
Optimierungsbasierte Regelungsmethoden an einem Turmdrehkran im Labormaßstab
Projektschwerpunkte
- Echtzeitfähige Implementierung von optimierungsbasierten Regelungsmethoden
- Modellprädiktive Regelung mit Berücksichtigung von Systembeschränkungen
- Pfadplanung
- Pfadfolgeregelung
Beschreibung
Turmdrehkräne sind sehr weit verbreitet und stellen ein interessantes Anwendungsgebiet für die Regelungstechnik dar. Eine wichtige Aufgabenstellung ist das Positionieren des Hakens unter gleichzeitiger Minimierung von Pendelbewegungen des Seils an der Sollposition. Eine weitere mögliche Zielsetzung ist die Unterdrückung von Störungen wie zum Beispiel Windkräfte und unterschiedlich große Lastmassen.
Für die Erfüllung der obigen und weiterer Aufgabenstellungen werden geeignete Regelungskonzepte entwickelt und an einem Turmdrehkran im Labormaßstab getestet. Der Schwerpunkt liegt dabei auf optimierungsbasierten Ansätzen, im Speziellen aus dem Bereich der modellprädiktiven Regelung (MPC). Diese ermöglicht neben der Erfüllung der primären Zielsetzung auch die Berücksichtigung von Systembeschränkungen und das Erreichen eines optimalen Verhaltens des geschlossenen Regelkreises im Sinne des zugrundeliegenden Kostenfunktionals. Darunter fällt beispielsweise die Minimierung des Energieverbrauches der Antriebsmotoren.
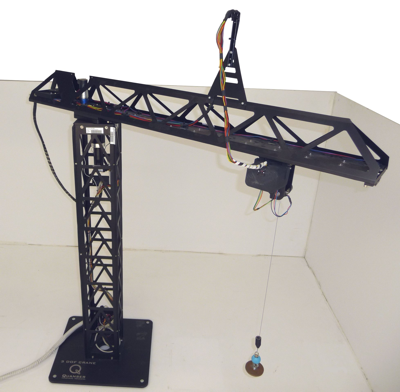
Turmdrehkran im Labormaßstab.
Zur Vermeidung von Kollisionen mit Hindernissen ist es erforderlich, dass der Haken bzw. die Lastmasse einem vorgegebenen kollisionsfreien Pfad möglichst genau folgt. Diese Aufgabenstellung kann von zwei Blickwinkeln betrachtet werden.
- Trajektorienfolgeregelung: Dabei wird die zeitliche Evolution entlang des geometrischen Pfades von vornherein festgelegt. Der Regler hat die Aufgabe, die Hakenposition dieser zeitlich parametrierten Trajektorie nachzuführen. Dies wurde im Rahmen des CLIC-Projektes (Closed-Loop Integration of Cognition, Communication and Control, 2009-2010) umgesetzt. Ein weiteres Ziel dieses Projektes war es, basierend auf Informationen eines verteilten Bildverarbeitungssystems in Echtzeit einen geeigneten kollisionsfreien Pfad zu ermitteln. Die Vernetzung aller Komponenten erfolgt dabei über eine echtzeitfähige Kommunikationsstruktur. Damit kann auch auf bewegte Hindernisse reagiert werden.
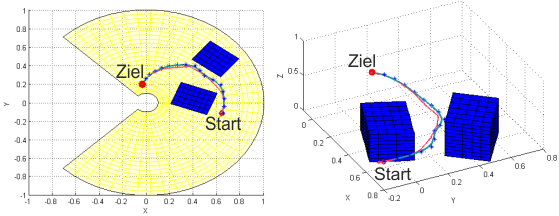
Verfolgung einer Trajektorie zur Vermeidung von Kollisionen mit Hindernissen, Darstellung von Ist- (rot) und Solltrajektorie (grün) des Kranhakens.
Neben dem ACIN waren am CLIC-Projekt auch das Institut für Technische Informatik (Technische Universität Wien), das Institut für Vernetzte und Eingebettete Systeme (Alpen-Adria-Universität Klagenfurt) und die TTTech Computertechnik AG beteiligt.
- Pfadfolgeregelung: Bei dieser wird auch die zeitliche Evolution entlang des geometrischen Pfades vom Regler bestimmt. Dadurch kann die örtliche Verfolgung des Pfades gegenüber der Zeitdauer der Pfadverfolgung priorisiert werden. Beim Auftreten von Störeinwirkungen ist es damit möglich, erst nach dem Ausregeln der aufgetretenen Abweichungen die Verfolgung des Pfades in Richtung des Zielpunktes wieder aufzunehmen.
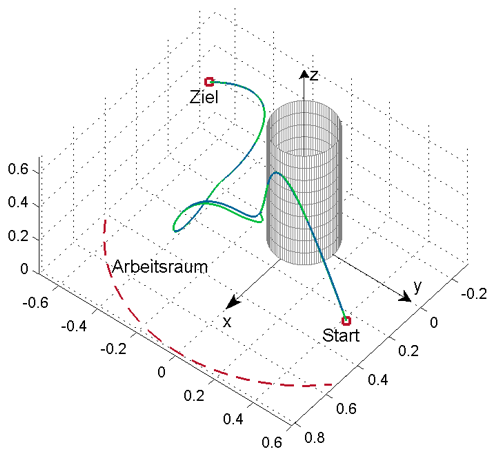
Pfadfolgeregelung mit Störung in Form einer externen Krafteinwirkung auf den Kranhaken, Darstellung von Ist- (grün) und Sollpfad (blau) des Kranhakens.
Ausgewählte Veröffentlichungen
- M. Böck and A. Kugi, Real-time Nonlinear Model Predictive Path-Following Control of a Laboratory Tower Crane, IEEE Transactions on Control Systems Technology, vol. 22, iss. 4, p. 1461–1473, 2014.
[BibTex] [Download]@Article{Boeck14, Title = {Real-time Nonlinear Model Predictive Path-Following Control of a Laboratory Tower Crane}, Author = {B{\"o}ck, Martin and Kugi, Andreas}, Journal = {IEEE Transactions on Control Systems Technology}, Pages = {1461--1473}, Volume = {22}, Year = {2014}, Number = {4}, Doi = {10.1109/TCST.2013.2280464}, } - M. Böck and A. Kugi, Manifold Stabilization and Path-Following Control for Flat Systems with Application to a Laboratory Tower Crane, in Proceedings of the 53rd IEEE Conference on Decision and Control (CDC), Los Angeles, USA, 2014, p. 4529–4535.
[BibTex] [Download]@InProceedings{Boeck14b, author = {Martin B{\"o}ck and Andreas Kugi}, title = {Manifold Stabilization and Path-Following Control for Flat Systems with Application to a Laboratory Tower Crane}, booktitle = {Proceedings of the 53rd IEEE Conference on Decision and Control (CDC)}, year = {2014}, month = {12}, pages = {4529--4535}, doi = {10.1109/CDC.2014.7040096}, address = {Los Angeles, USA}, } - M. Egretzberger, K. Graichen, and A. Kugi, Flatness-Based MPC and Global Path Planning Towards Cognition-Supported Pick-and-Place Tasks of Tower Cranes, in Advanced Dynamics and Model-Based of Control Structures and Machines, H. Irschik, M. Krommer, and A. Belyaev, Eds., Wien: Springer, 2011, p. 63–72.
[BibTex]@Incollection{Egretzberger11e, Title = {Flatness-Based MPC and Global Path Planning Towards Cognition-Supported Pick-and-Place Tasks of Tower Cranes}, Author = {M. Egretzberger and K. Graichen and A. Kugi}, Booktitle = {Advanced Dynamics and Model-Based of Control Structures and Machines}, Publisher = {Springer}, Year = {2011}, Address = {Wien}, Editor = {H. Irschik and M. Krommer and A. Belyaev}, Pages = {63--72}, Doi = {10.1007/978-3-7091-0797-3_8}, } - K. Graichen, M. Egretzberger, and A. Kugi, Suboptimal model predictive control of a laboratory crane, in 8th IFAC Symposium on Nonlinear Control Systems (NOLCOS), Bologna, Italy, 2010, p. 397–402.
[BibTex]@InProceedings{Graichen10, author = {K. Graichen and M. Egretzberger and A. Kugi}, title = {Suboptimal model predictive control of a laboratory crane}, booktitle = {8th IFAC Symposium on Nonlinear Control Systems (NOLCOS)}, year = {2010}, pages = {397--402}, doi = {10.3182/20100901-3-IT-2016.00140}, address = {Bologna, Italy}, } - K. Graichen, M. Egretzberger, and A. Kugi, Ein suboptimaler Ansatz zur schnellen modellprädiktiven Regelung nichtlinearer Systeme, at – Automatisierungstechnik, vol. 58, p. 447–456, 2010.
[BibTex]@Article{Graichen10c, Title = {Ein suboptimaler {A}nsatz zur schnellen modellpr{\"a}diktiven {R}egelung nichtlinearer {S}ysteme}, Author = {K. Graichen and M. Egretzberger and A. Kugi}, Journal = {at -- Automatisierungstechnik}, Pages = {447--456}, Volume = {58}, Year = {2010}, Doi = {10.1524/auto.2010.0860}, }
Projektpartner und Förderung
Das CLIC-Projekt wurde gefördert durch das FIT-IT Programm der Österreichischen Forschungsförderungsgesellschaft (FFG) (Projektnr. 819482). Neben dem ACIN waren beteiligt:
Ansprechpartner
Dipl.-Ing. Dr.techn. Martin BöckUniv.-Prof. Dr.techn. Andreas Kugi