
Optimization-based control methods applied to a laboratory-scale tower crane
Project focus
- Real-time implementation of optimization-based control methods
- Constrained model predictive control
- Path planning
- Path-following control
Description
Tower cranes are widely-used and constitute an interesting field of application for modern control theory. An important task is to control the position of the hook by suppressing the oscillating motion of the cable at the same time. Another possible goal is the rejection of disturbances such as different load masses or external forces induced by wind.
Different control concepts are developed to cope with theseand further goals. The resulting controllers are tested on a laboratory tower crane. The focus lies on optimization-based control methods, in particular model predictive control (MPC). MPC is able to systematically take into account system constraints and to achieve an optimal behavior of the closed-loop system in the sense of the underlying objective functional. This includes for example the minimization of the energy consumption of the actuators.
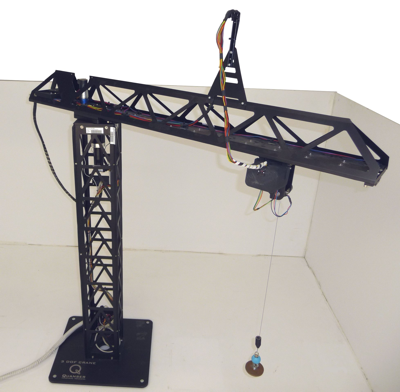
Laboratory-scale tower crane.
To avoid collisions with obstacles, it is required that the hook or rather the load mass follows a given collision-free path as accurately as possible. This task can be tackled from two different directions.
- Trajectory tracking control: The time evolution along the geometric path is fixed in advance. The controller has to achieve the tracking of the time-parameterized trajectory. This task was implemented in the CLIC-project (Closed-Loop Integration of Cognition, Communication and Control, 2009-2010). Another goal of this project was to generate a collision-free path based on information from a distributed image processing system in real-time. The integration of all components is carried out by means of a synchronous communication structure. Therefore, it is also possible to account for moving obstacles.
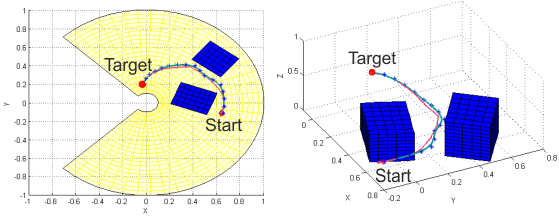
Trajectory tracking for collision avoidance, desired trajectory (green) vs. actual trajectory (red) of the crane hook.
The other partners in the CLIC-project were the Department of Computer Engineering (TU Wien), the Institute of Networked and Embedded Systems (Alpen-Adria-Universität Klagenfurt) and TTTech Computertechnik AG.
- Path-following control: Within this framework, the time evolution along the geometric path is left as a degree of freedom for the controller. This gives the possibility to prioritize the spatial tracking of the path compared to the overall time it takes to complete the traversal along the path. In the case of disturbances, this allows to correct the resulting deviations before the traversal of the path towards the end-point is continued.
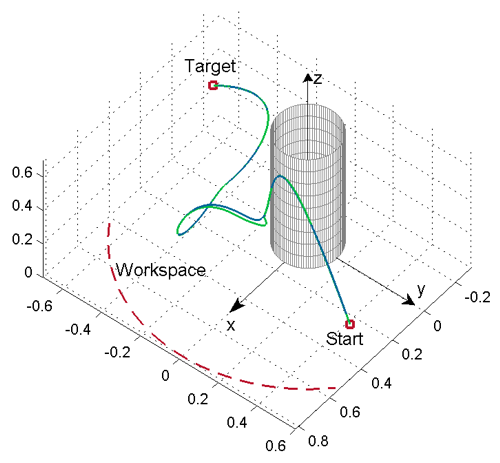
Path-following control with an external disturbance force acting on the crane hook, desired path (blue) vs. actual path (green) of the crane hook.
Selected publications
- M. Böck and A. Kugi, Real-time Nonlinear Model Predictive Path-Following Control of a Laboratory Tower Crane, IEEE Transactions on Control Systems Technology, vol. 22, iss. 4, p. 1461–1473, 2014.
[BibTex] [Download]@Article{Boeck14, Title = {Real-time Nonlinear Model Predictive Path-Following Control of a Laboratory Tower Crane}, Author = {B{\"o}ck, Martin and Kugi, Andreas}, Journal = {IEEE Transactions on Control Systems Technology}, Pages = {1461--1473}, Volume = {22}, Year = {2014}, Number = {4}, Doi = {10.1109/TCST.2013.2280464}, } - M. Böck and A. Kugi, Manifold Stabilization and Path-Following Control for Flat Systems with Application to a Laboratory Tower Crane, in Proceedings of the 53rd IEEE Conference on Decision and Control (CDC), Los Angeles, USA, 2014, p. 4529–4535.
[BibTex] [Download]@InProceedings{Boeck14b, author = {Martin B{\"o}ck and Andreas Kugi}, title = {Manifold Stabilization and Path-Following Control for Flat Systems with Application to a Laboratory Tower Crane}, booktitle = {Proceedings of the 53rd IEEE Conference on Decision and Control (CDC)}, year = {2014}, month = {12}, pages = {4529--4535}, doi = {10.1109/CDC.2014.7040096}, address = {Los Angeles, USA}, } - M. Egretzberger, K. Graichen, and A. Kugi, Flatness-Based MPC and Global Path Planning Towards Cognition-Supported Pick-and-Place Tasks of Tower Cranes, in Advanced Dynamics and Model-Based of Control Structures and Machines, H. Irschik, M. Krommer, and A. Belyaev, Eds., Wien: Springer, 2011, p. 63–72.
[BibTex]@Incollection{Egretzberger11e, Title = {Flatness-Based MPC and Global Path Planning Towards Cognition-Supported Pick-and-Place Tasks of Tower Cranes}, Author = {M. Egretzberger and K. Graichen and A. Kugi}, Booktitle = {Advanced Dynamics and Model-Based of Control Structures and Machines}, Publisher = {Springer}, Year = {2011}, Address = {Wien}, Editor = {H. Irschik and M. Krommer and A. Belyaev}, Pages = {63--72}, Doi = {10.1007/978-3-7091-0797-3_8}, } - K. Graichen, M. Egretzberger, and A. Kugi, Suboptimal model predictive control of a laboratory crane, in 8th IFAC Symposium on Nonlinear Control Systems (NOLCOS), Bologna, Italy, 2010, p. 397–402.
[BibTex]@InProceedings{Graichen10, author = {K. Graichen and M. Egretzberger and A. Kugi}, title = {Suboptimal model predictive control of a laboratory crane}, booktitle = {8th IFAC Symposium on Nonlinear Control Systems (NOLCOS)}, year = {2010}, pages = {397--402}, doi = {10.3182/20100901-3-IT-2016.00140}, address = {Bologna, Italy}, } - K. Graichen, M. Egretzberger, and A. Kugi, Ein suboptimaler Ansatz zur schnellen modellprädiktiven Regelung nichtlinearer Systeme, at – Automatisierungstechnik, vol. 58, p. 447–456, 2010.
[BibTex]@Article{Graichen10c, Title = {Ein suboptimaler {A}nsatz zur schnellen modellpr{\"a}diktiven {R}egelung nichtlinearer {S}ysteme}, Author = {K. Graichen and M. Egretzberger and A. Kugi}, Journal = {at -- Automatisierungstechnik}, Pages = {447--456}, Volume = {58}, Year = {2010}, Doi = {10.1524/auto.2010.0860}, }
Project partners and funding
The CLIC-project received funding from the FIT-IT program of the Austrian Research Promotion Agency (FFG) (project no. 819482). Besides ACIN, the following partners were involved: