06.05.2024 Houska Prize Nomination 2024
Promoting business-related research and innovation is not only essential for strengthening Austria as a business location but also the declared goal of the Houska Prize. Innovation performance and economic impact are key criteria in its selection process.
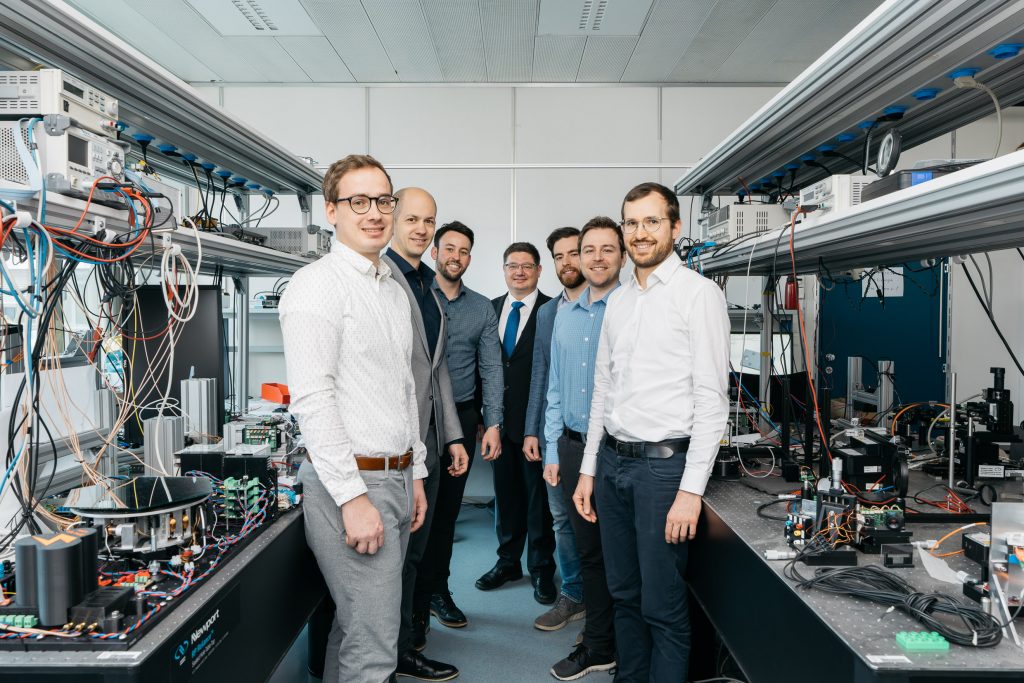
With “High-Precision Scanning Mirrors for 3D Measurement Technology and Satellite Communication”, we have this year been nominated for this prestigious prize, which was awarded end of April 2024. Next to the applications in 3D sensors, fast steering mirrors are a key component for optical satellite communication. Together with Micro-Epsilon as industrial partner, the developed research results have already been implemented into first products.
For more information on the project, check out the nomination video. It was an extraordinary event with excellent research projects and highly deserving winners. Congratulations again to all award recipients!
Nomination video
Project profile
Press release on Houska Prize winners

Fotocredit: Alexander Müller
Fotocredit: Gregor Hofbauer
15.04.2024 AIROV – Best Paper Award
We are pleased to inform that Peter Hönig and his paper “Improving 2D-3D Dense Correspondences with Diffusion Models for 6D Object Pose Estimation” won the AIROV Best Paper Award!
12.12.2023 Dr. David Brunner was awarded the Dr. Ernst Fehrer-Preis
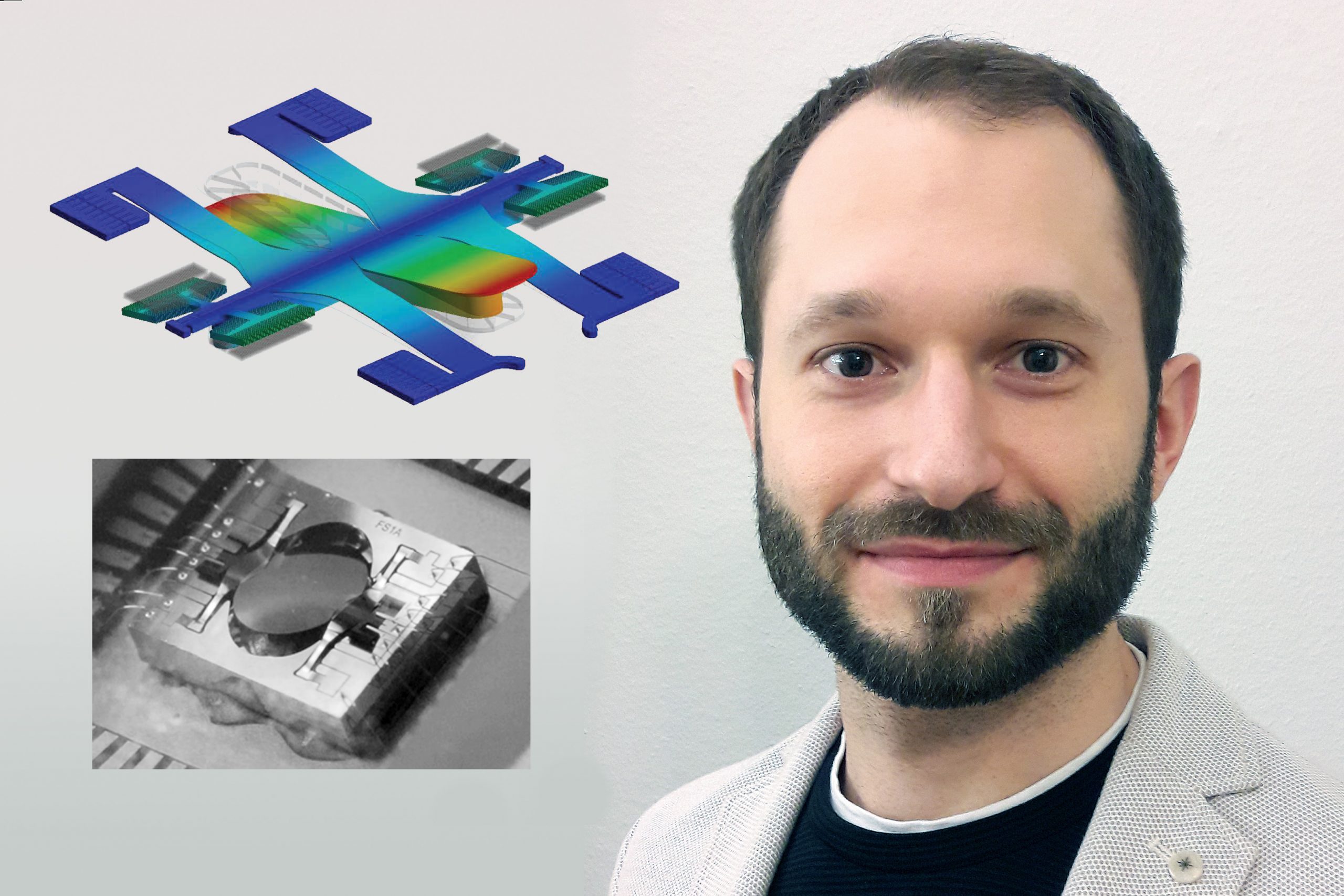 On December 6, 2023 Dr. David Brunner has received the Dr. Ernst Fehrer-Preis for his cutting-edge research on control of scanning MEMS-mirrors for light detection and ranging in automotive applications.
On December 6, 2023 Dr. David Brunner has received the Dr. Ernst Fehrer-Preis for his cutting-edge research on control of scanning MEMS-mirrors for light detection and ranging in automotive applications.
Since 1982, the Dr. Ernst Fehrer Award has been awarded yearly for outstanding technical research achievements with practical applicability at the Technische Universität Wien.
Congratulations on this outstanding achievement!
fotocredit: TU Wien
TU Wien News, 6.Dez.2023
03.07.2023 Auszeichnung durch SEW Eurodrive Stiftung
23.06.2023 Prof. Kugi erhält die Goldene Stefan-Ehrenmedaille
05.06.2023 2022 Honorable Mention from the IEEE Robotics and Automation Letters (RA-L)
At the IEEE International Conference on Robotics and Automation (ICRA) 2023 an “honorable mention” was received for the publication
Marie Harder, Manuel Keppler, Xuming Meng, Christian Ott, Hannes Höppner and Alexander Dietrich, “Simultaneous Motion Tracking and Joint Stiffness Control of Bidirectional Antagonistic Variable-Stiffness Actuators,” in IEEE Robotics and Automation Letters, vol. 7, no. 3, pp. 6614-6621, July 2022.
This publication resulted from an international collaboration between the German Aerospace Center (DLR), TU Wien, and BHT Berlin. The paper was selected by the RA-L Editorial Board as one of 5 Honorable Mentions among more than 1100 papers published in the IEEE Robotics and Automation Letters (RA-L) in 2022.
16.01.2023 IEEE Fellow Award for Christian Ott
Univ.-Prof. Christian Ott was awarded the IEEE Fellow Award for contributions to torque-control theory using passive joint elasticity and the whole-body control of humanoids. The IEEE Fellow is the highest grade of membership in IEEE. Less than 0.1% of voting members are selected annually for this member grade elevation. It is recognized by the technical community as a prestigious honor and an important career achievement.
Press release from TU Wien, 16.01.2023
Announcement from IEEE-RAS
30.11.2022 Best Paper Award at Humanoids 2022
We are proud to announce that a conference paper from the NatDyReL project was awarded the Best Interactive Paper Award at Humanoids 2022 in Okinawa, Japan! The paper titled „A Guideline for Humanoid Leg Design with Oblique Axes for Bipedal Locomotion” authored by Konrad Fründ, Anton Shu, Florian Loeffl, and Christian Ott evaluates the benefits of biologically inspired leg kinematics for humanoid robots.
24.11.2022 Sub auspiciis Promotion
20.11.2022 Bachelor prize for Nikolas Thelenberg
Congratulations to our colleague Nikolas Thelenberg, who received the Bachelor prize from the „Berliner Mathematische Gesellschaft (BMG e.V.)“ for his Bachelor thesis on “Trajectory tracking by model predictive control with applications to robot manipulators” at TU Berlin!