13.06.2024 HiFliTE
Humanoide Roboter sollen das Aussehen und die komplizierten Bewegungen des Menschen nachahmen. Das Bestreben, humanoide Roboter mit menschenähnlichen Bewegungsfähigkeiten zu schaffen, stellt einen grundlegenden Meilenstein in der Robotik dar. Auf der einen Seite konzentrieren sich die Forscher darauf, Robotern die gleiche Fähigkeit wie Menschen zu verleihen, mehrere Aufgaben gleichzeitig auszuführen. Auf der anderen Seite konzentrieren sich die Forscher auf die Entwicklung dynamischer Regelungen, die es humanoiden Robotern ermöglichen, auf verschiedenen Höhen zu laufen oder zu springen und so ihre Mobilität in unstrukturierten Umgebungen zu verbessern.
In diesem Zusammenhang zielt das HiFliTE-Projekt darauf ab, zweibeinige Roboter in die Lage zu versetzen, Aufgaben auszuführen, die für die Roboterstruktur nicht durchführbar sind (z. B. aufgrund der Höhe, der begrenzten Gelenkpositionen oder des Fehlens von Gliedmaßen), indem die Flugphase eines Sprungs ausgenutzt wird. Um dieses Ziel zu erreichen, wird ein High-Level-Framework entworfen, um die Bewegung während der Start-, Flug- und Landephasen zu planen. Während der Flugphase besteht das Ziel darin, einen Endeffektor des Roboters so zu steuern, dass er eine bestimmte Aufgabe ausführt, während der Rest des Körpers die Bewegung des Endeffektors kompensiert und den Roboter stabilisiert. Dieser Rahmen wird an einem zweibeinigen Roboter validiert, der nicht mit Armen ausgestattet ist, um die Aufgabe des Öffnens der Tür zu erfüllen. Da der Roboter keine Arme hat, wird während der Flugphase ein Bein gesteuert, um gegen den Türgriff/die Panikstange zu treten, während das andere Bein und der Rumpf die Bewegung kompensieren sollen.

01.06.2024 HängMan
Das HängMan-Projekt zielt auf eine neuartige technische Lösung für kontaktbehaftete Wartungs- und Instandhaltungsarbeiten großräumiger Infrastruktur und industrieller Anlagen ab, welche eine Handhabung in schwer zugänglichen Lagen in großer Höhe erfordern. Während für die rein visuelle Inspektion bereits unbemannte Drohnen eingesetzt werden, existiert für kontaktbehaftete Manipulationsaufgaben bisher keine breit einsetzbare Lösung. Das anvisierte System besteht aus einer mit Propellern ausgestatteten Basis und einem Manipulatorarm. Hierbei wird die Basis von einem externen Kransystem getragen und grob im Aufgabenbereich positioniert. Im Vergleich zu herkömmlichen Flugsystemen, besitzt das System eine deutlich höhere Traglast und erlaubt die Anwendung großer externer Kräfte auf die Umgebung. Durch die Propeller wird die unerwünschte Pendelbewegung der Basis ausgeglichen und die Plattform genau positioniert, während Interaktionskräfte aufgrund der Bewegung und Manipulation des Roboterarmes ausgeglichen werden. In dem Projekt soll ein derartiges System prototypisch aufgebaut werden und hinsichtlich der Möglichkeiten zur präzisen Positionierung und Manipulation der Umgebung evaluiert werden. Auch der Einfluss von externen Störkräften, wie Wind, auf die Genauigkeit soll untersucht werden. Das System wird abschließend in zwei Beispielsanwendungen der Inspektion und Instandhaltung getestet. Mögliche Anwendungsgebiete dieses Systems liegen in der Wartung und Instandhaltung von Anlagen in der Öl- und Gasindustrie, der Wartung und Inspektion von Windrädern, Hochspannungsmasten, Brückenpfeilern oder Photovoltaik-Kollektoren. Derartige Aufgaben erfordern besonders geschultes Personal, wie erfahrene Industriekletterer, und sind entsprechend zeit- und kostenintensiv.
Fördergeber:
Österreichische Forschungsförderungsgesellschaft (FFG)
14.03.2023 ERC NatDyReL (Utilizing Natural Dynamics for Reliable Legged Locomotion)
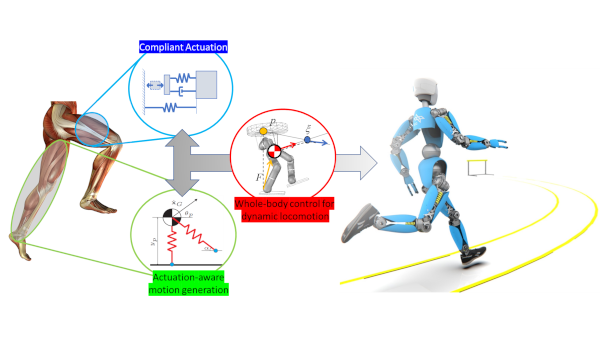
Das NatDyReL-Projekt (Utilizing Natural Dynamics for Reliable Legged Locomotion) zielt auf einen grundlegenden Paradigmenwechsel bei der Konstruktion und Steuerung von humanoiden Robotern ab. Dies ebnet den Weg für eine neue Generation von intrinsisch nachgiebigen Robotern, die in der Lage sind, ihre Open-Loop-Aktorimpedanz in Echtzeit an die Aufgabe anzupassen.
Projektdetails
Im Gegensatz zu der inzwischen ausgereiften Technologie der drehmomentgeregelten Antriebe werden die in NatDyReL entwickelten Roboter eine aktive Anpassung der dynamischen Antriebseigenschaften (z.B. Steifigkeit & Dämpfung) erlauben. Dadurch kann der Roboter sein dynamisches Verhalten zur Laufzeit an die aktuellen Bodenverhältnisse bzw. die gewünschte Schrittgeschwindigkeit anpassen. Zusätzlich kann bei jedem Schritt ein Teil der kinetischen Energie in den elastischen Antrieben zwischengespeichert werden, wodurch eine energieeffiziente Ausführung von dynamischen Laufbewegungen ermöglicht wird. Um diese Konzepte in der Praxis erfolgreich umzusetzen, ist es erforderlich, die nachgiebige Antriebsdynamik sowohl bei der Planung der Gesamtkörperbewegung als auch bei der Echtzeitsteuerung vollständig zu berücksichtigen. Das Projekt erfordert somit eine enge interdisziplinäre Zusammenarbeit von Experten aus verschiedenen Disziplinen, insbesondere aus der Robotik, Regelungstechnik und Mechatronik.
Zwischenergebnisse
Simulation des NatDyReL-Roboters bei einer Laufbewegung mit 4m/s. Die Bewegungen wurden mit einem passivitätsbasierten Gesamtkörperregler generiert, wobei die erforderlichen Kontaktkräfte aus dem BID-Framework („Biologically-Inspired Dead-beat control“) berechnet wurden.
Diese Simulation zeigt eine Laufbewegung mit einer Geschwindigkeit von 3 m/s. Die Bewegung wurde auf eine minimale Motorleistung optimiert.
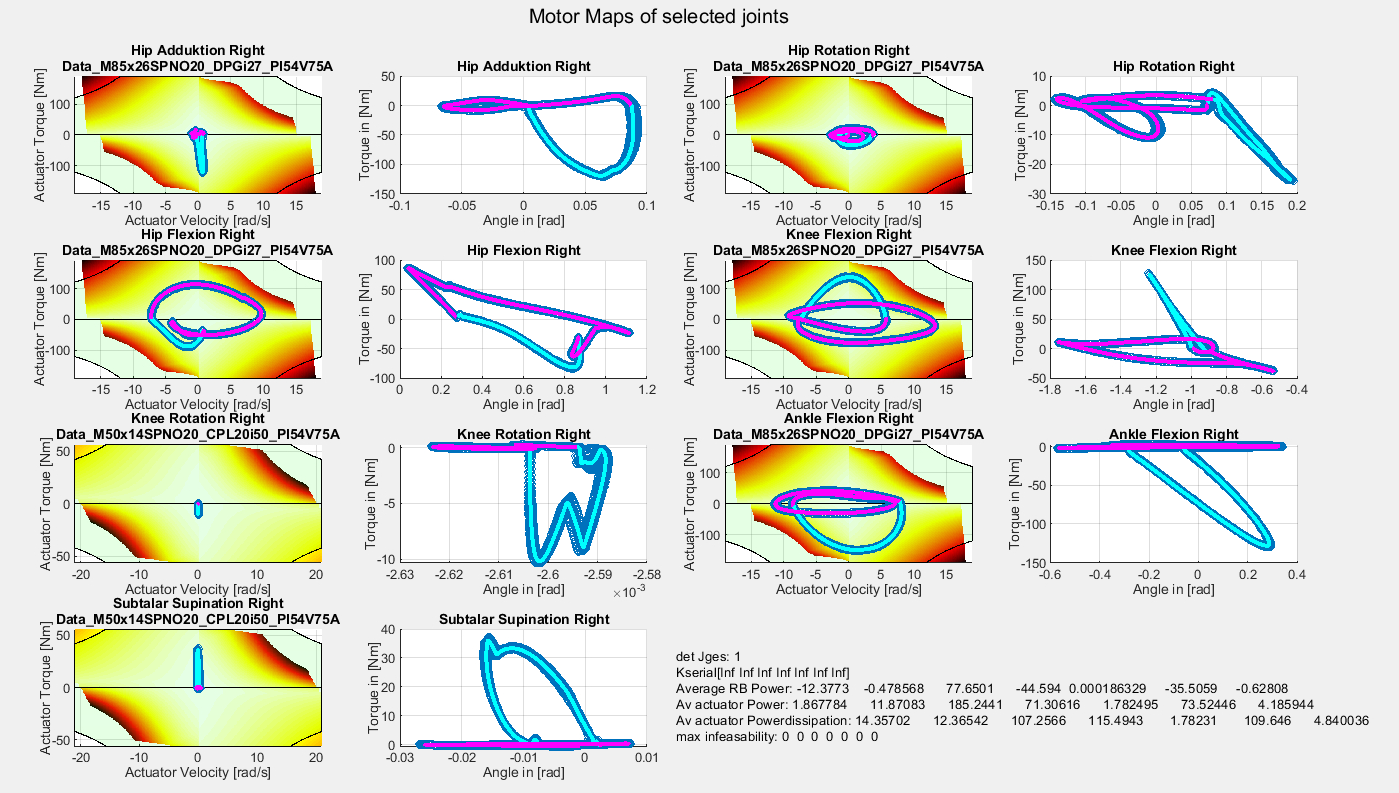
Die resultierenden Motorgeschwindigkeiten und Drehmomente werden im zulässigen Bereich optimiert.
Forschungsfragen
Mit der in den vier Arbeitspaketen durchgeführten Forschung wollen wir die folgenden grundlegenden wissenschaftlichen Fragen beantworten:
- Wie können energieeffiziente Gänge und hochperformante Ganzkörperbewegungen für stark nachgiebige Beinroboter entworfen werden?[WP2]
- Wie lassen sich dynamische Kontaktübergänge während Multikontakt-Bewegungen realisieren? [WP3]
- Wie lassen sich all diese Bewegungen durch Regelungsansätze robust stabilisieren? [WP2-3]
- Wie kann die intrinsische Impedanzcharakteristik an Unsicherheiten und Variabilität der Körperdynamik oder der Umgebung des Roboters angepasst werden? [WP2]
- Wie können die Körperstruktur und das Antriebssystem humanoider Roboter gestaltet werden, um eine Balance zwischen den Anforderungen an Energieeffizienz, Robustheit und Leistung in Bezug auf Geschwindigkeit zu erzielen? [WP4]
Projektstruktur
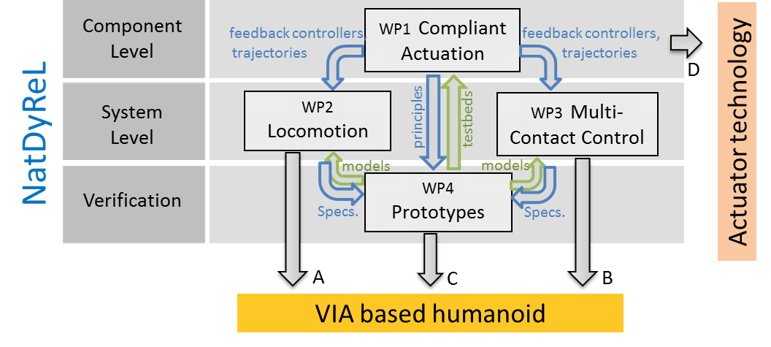
AP1: Grundlagen zur Regelung von Robotern mit elastischen Antrieben
AP2: Energieeffiziente Bewegung
AP3: Multikontakt-Regelung
AP4: Prototypenentwicklung
Partner
- TU Wien (Koordinator)
- Institut für Robotik und Mechatronik, Deutsches Zentrum für Luft- und Raumfahrt (DLR e.V.)
Funding
Consolidator Research Grant des Europäischen Forschungsrates (ERC).
10.03.2023 Regelung von Quantenzuständen für levitierte Teilchen
Schwerpunkte
- Feedback-Kühlen von levitierten Nanopartikeln in deren quantenmechanischen Grundzustand
- Erzeugung von nicht-klassischen Bewegungszuständen, z.B. gequetschten Zuständen und nicht-Gaußsche Zustände
- Hochperformante Echtzeitregelung mittels FPGAs
- Formung des Potentials der optischen Falle
- Hochpräzise Messanwendungen auf Basis von Quanteneffekten
Beschreibung
Über das vergangene Jahrzehnt hat die Entwicklung optomechanischer Plattformen derartige Fortschritte erfahren, dass sich in der Manipulation von Nano- und Mikroobjekte inzwischen Quanteneffekte zu manifestieren beginnen. Insbesondere bieten Systeme auf Basis optischer Levitation eine überlegene Isolierung der Nanopartikel von ihrer Umgebung während sie gleichzeitig von der Flexibilität rein optischer Manipulation profitieren. Diese Experimente kombinieren etablierte Methoden aus der Optomechanik mit Strategien aus der Atomphysik, der Materiewelleninterferometrie und der Regelungstheorie, um makroskopische Quantenphysik zu erforschen. Zusammen mit ihrer unübertroffenen Empfindlichkeit haben levitierte Nanopartikel eine Vielzahl von möglichen Anwendungsgebieten, welche von der Erforschung dunkler Materie und Abweichungen zur newtonschen Gravitation bis hin zu kommerziellen Sensoranwendungen reichen.
In diesem Forschungsprojekt wollen wir mithilfe von Methoden der Regelungstheorie echtzeitfähige Algorithmen entwickeln, um bewegte Quantenzustände des schwebenden Teilchens zu erzeugen. Dazu ist die Kühlung des Teilchens (genauer: der Bewegung des Massenschwerpunkts) durch Feedback ein entscheidender erster Schritt, der durch die Kombination von Heisenberg-begrenzten Messungen mit optimalen stochastischen Regelungskonzepten möglich ist. Dies öffnet die Tür zu quantenmechanischen Bewegungszuständen wie beispielsweise gequetschten Zuständen und letztlich nicht-Gaußschen Zuständen.
Ausgewählte Publikationen
- V. Mlynář, S. Dago, J. Rieser, M. A. Ciampini, M. Aspelmeyer, N. Kiesel, A. Kugi, and A. Deutschmann-Olek, Feedback stabilization of a nanoparticle at the intensity minimum of an optical double-well potential, Control Engineering Practice, vol. 168, p. 106665, 2026.
[BibTex]@Article{Mlynar2026, author = {Mlynář, Vojtěch and Dago, Salambô and Rieser, Jakob and Ciampini, Mario A. and Aspelmeyer, Markus and Kiesel, Nikolai and Kugi, Andreas and Deutschmann-Olek, Andreas}, title = {Feedback stabilization of a nanoparticle at the intensity minimum of an optical double-well potential}, doi = {10.1016/j.conengprac.2025.106665}, issn = {0967-0661}, pages = {106665}, volume = {168}, journal = {Control Engineering Practice}, year = {2026}, } - G. M. de Papigny, F. Gassibe, and V. Padois, F-RRT: An Efficient Algorithm for Semi-Constrained Path Planning Problems, IEEE Robotics and Automation Letters, vol. 11, iss. 3, p. 3318–3325, 2026.
[BibTex]@Article{Mlynar2026, author = {de Papigny, Guillaume de Mathelin and Gassibe, Franco and Padois, Vincent}, title = {F-RRT: An Efficient Algorithm for Semi-Constrained Path Planning Problems}, doi = {10.1109/LRA.2026.3656722}, issn = {2377-3774}, number = {3}, pages = {3318--3325}, volume = {11}, journal = {IEEE Robotics and Automation Letters}, year = {2026}, } - K. Winkler, A. V. Zasedatelev, B. A. Stickler, U. Delić, A. Deutschmann-Olek, and M. Aspelmeyer, Steady-state entanglement of interacting masses in free space through optimal feedback control, Physical Review Research, vol. 7, iss. 4, 2025.
[BibTex]@Article{Winkler2025, author = {Winkler, K and Zasedatelev, A.V. and Stickler, B.A. and Deli\'c, U. and Deutschmann-Olek, A. and Aspelmeyer, M.}, title = {Steady-state entanglement of interacting masses in free space through optimal feedback control}, doi = {10.1103/hxc8-fxcb}, issn = {2643-1564}, number = {4}, volume = {7}, journal = {Physical Review Research}, publisher = {American Physical Society (APS)}, year = {2025}, } - S. Dago, J. Rieser, M. A. Ciampini, V. Mlynář, A. Kugi, M. Aspelmeyer, A. Deutschmann-Olek, and N. Kiesel, Stabilizing nanoparticles in the intensity minimum: feedback levitation on an inverted potential, , vol. 32, iss. 25, p. 45133, 2024.
[BibTex]@Article{Dago2024, author = {Dago, Salambô and Rieser, J. and Ciampini, M. A. and Mlynář, V. and Kugi, A. and Aspelmeyer, M. and Deutschmann-Olek, A. and Kiesel, N.}, journaltitle = {Optics Express}, title = {Stabilizing nanoparticles in the intensity minimum: feedback levitation on an inverted potential}, doi = {10.1364/oe.541267}, issn = {1094-4087}, number = {25}, pages = {45133}, volume = {32}, publisher = {Optica Publishing Group}, year = {2024}, } - L. Magrini, P. Rosenzweig, C. Bach, A. Deutschmann-Olek, S. G. Hofer, S. Hong, N. Kiesel, A. Kugi, and M. Aspelmeyer, Real-time optimal quantum control of mechanical motion at room temperature, Nature, vol. 595, p. 373–377, 2021.
[BibTex] [Download]@Article{magrini2021, author = {L. Magrini and P. Rosenzweig and C. Bach and A. {Deutschmann-Olek} and S. G. Hofer and S. Hong and N. Kiesel and A. Kugi and M. Aspelmeyer}, title = {Real-time optimal quantum control of mechanical motion at room temperature}, doi = {10.1038/s41586-021-03602-3}, pages = {373--377}, volume = {595}, journal = {Nature}, year = {2021}, }
Partner
Forschungsförderung
Dieses Projekt wird vom Österreichischen Wissenschaftsfond (FWF) [PAT 9140723] und der Europäischen Union – NextGenerationEU gefördert.
![]()

10.03.2023 Regelungsstrategien für Quantenfelder
Projektschwerpunkte
- Kontrollierte optische Potentiale für ultra-kalten Atomwolken durch iterative Regelungsalgorithmen
- Optimale (quanten-) themodynamische Operationen des Quantengases
- Kontrolliertes Splitting einer Atomwolke zur Erzeugung von Spin-gequetschten oder verschränkten Zuständen
Beschreibung
Einige der faszinierendsten Probleme der Physik, vom frühen Universum bis zu Quantenmaterialien, hängen mit der Dynamik großer Ensembles wechselwirkender Teilchen zusammen, die ein echtes Quantenverhalten zeigen. Solche Quanten-Vielteilchenprobleme und ihre quantenfeldtheoretische Beschreibung lassen sich selbst auf den schnellsten klassischen Computern oft nur schwer oder gar nicht in ihrer vollen Komplexität simulieren. Um dieses Problem zu umgehen, haben sich im letzten Jahrzehnt sogenannte Quantensimulatoren zu einem sehr aktiven Forschungsgebiet entwickelt. Ähnlich wie Analogrechner zielt die Quantensimulation darauf ab, hochgradig konfigurierbare Experimente aufzubauen, um die gewünschte Physik hinter Quanten-Vielteilchensystemen mit diesen Modellsystemen zu reproduzieren. Ein zentraler Aspekt bei der Nutzung solcher Modellsysteme als Quantensimulatoren ist die Steuerung des Modellsystems zur Durchführung der gewünschten Simulation, d. h. die Vorbereitung der Anfangszustände und die Abbildung des gewünschten Simulationsziels mit dem experimentell verfügbaren Modell. In Schwebe gehaltene Wolken aus ultrakalten Atomen sind dazu ideale Modellsysteme, welche ausreichend ausgereift und flexibel sind, um routinemäßig in Labors auf der ganzen Welt erzeugt zu werden.
Die Hauptmotivation dieses Projekts ist die Entwicklung von Regelungs- und Steuerungsalgorithmen, die solche Operationen zur Quantensimulation für Experimente mit ultrakalten Atomen mit hinreichender Präzision ermöglichen. Insbesondere wollen wir algorithmische Werkzeuge für zwei unterschiedliche physikalische Situationen entwickeln: Erstens wollen wir Quantenfelder in kleinen thermischen Maschinen, die durch Aufteilen der Atomwolke in mehrere Teile erzeugt wird, gezielt manipulieren. Solche Experimente helfen, thermodynamische Eigenschaften von Vielteilchensystemen im Bereich quantenmechanischen Verhaltens zu untersuchen. Im Mittelpunkt steht dabei die Frage, ob und wie Anregungen eines isoliertes Quanten-Vielteilchensystems im Gegensatz zu klassischen Vielteilchensystemen in einen Gleichgewichtszustand übergehen. Dieses Problem geht letztlich auf die offene Frage nach dem Verhältnis zwischen der mikroskopischen und der makroskopischen Welt zurück. Zweitens wollen wir Algorithmen erforschen und entwickeln, um die Aufspaltung einer einzelnen Atomwolke in zwei Teile zu optimieren. Die vollständige Beschreibung dieses Spaltprozesses übersteigt aktuelle Rechenkapazitäten. Daher führen vorab berechnete Steuersequenzen zur Teilung der Wolke typischerweise zu unbefriedigenden Ergebnissen. Wir vermuten jedoch, dass die Kombination bekannter vereinfachter Modelle und Messinformationen ausreicht, um Steuersequenzen iterativ zu lernen und zu verbessern. Dies würde es uns ermöglichen, gewünschte Quantenzustände der geteilten Wolke experimentell herzustellen, die für viele Fragen der Quantenfeldtheorie und Anwendungen der Quantenmetrologie unerlässlich sind.
Partner
Forschungsgruppe Atomphysik und Quantenoptik (Jörg Schmiedmayer)
Ausgewählte Publikationen
- Y. Kuriatnikov, N. Würkner, K. Kumaran, T. Zhang, V. M. Ramana, A. Kugi, J. Schmiedmayer, A. Deutschmann-Olek, and M. Prüfer, Fast coherent splitting of Bose-Einstein condensates, Physical Review Research, vol. 7, iss. 4, 2025.
[BibTex]@Article{Kuriatnikov2025, author = {Kuriatnikov, Yevhenii and Würkner, Nikolaus and Kumaran, Karthikeyan and Zhang, Tiantian and Ramana, M. Venkat and Kugi, Andreas and Schmiedmayer, Jörg and Deutschmann-Olek, Andreas and Prüfer, Maximilian}, title = {Fast coherent splitting of Bose-Einstein condensates}, doi = {10.1103/pjqv-r3p6}, issn = {2643-1564}, number = {4}, volume = {7}, journal = {Physical Review Research}, publisher = {American Physical Society (APS)}, year = {2025}, } - A. Deutschmann-Olek, K. Schrom, N. Würkner, J. Schmiedmayer, S. Erne, and A. Kugi, Optimal control of quasi-1D Bose gases in optical box potentials, in Proceedings of the 22nd IFAC World Congress, Yokohama, Japan, 2023 2023, pp. 1339-1344.
[BibTex]@InProceedings{DeutschmannOlek2023a, author = {Deutschmann-Olek, A. and Schrom, K. and W\"urkner, N. and Schmiedmayer, J. and Erne, S. and A. Kugi}, booktitle = {Proceedings of the 22nd IFAC World Congress}, date = {2023}, title = {Optimal control of quasi-1D Bose gases in optical box potentials}, doi = {10.1016/j.ifacol.2023.10.1781}, number = {2}, pages = {1339-1344}, volume = {56}, address = {Yokohama, Japan}, issue = {2}, journaltitle = {IFAC-PapersOnLine}, month = {7}, year = {2023}, } - M. Calzavara, Y. Kuriatnikov, A. Deutschmann-Olek, F. Motzoi, S. Erne, A. Kugi, T. Calarco, J. Schmiedmayer, and M. Prüfer, Optimizing Optical Potentials With Physics-Inspired Learning Algorithms, Physical Review Applied, vol. 19, iss. 4, p. 44090, 2023.
[BibTex]@Article{Calzavara2023, author = {Calzavara, M. and Kuriatnikov, Y. and Deutschmann-Olek, A. and Motzoi, F. and Erne, S. and Kugi, A. and Calarco, T. and Schmiedmayer, J. and Pr\"ufer, M.}, title = {Optimizing Optical Potentials With Physics-Inspired Learning Algorithms}, doi = {10.1103/physrevapplied.19.044090}, number = {4}, pages = {044090}, volume = {19}, journal = {Physical Review Applied}, publisher = {American Physical Society (APS)}, year = {2023}, } - A. Deutschmann-Olek, M. Tajik, M. Calzavara, J. Schmiedmayer, T. Calarco, and A. Kugi, Iterative shaping of optical potentials for one-dimensional Bose-Einstein condensates, in Proceedings of the 61st Conference on Decision and Control (CDC), Cancun, Mexico, 2022, p. 5801–5806.
[BibTex]@InProceedings{DeutschmannOlek2022, author = {Deutschmann-Olek, Andreas and Tajik, Mohammadamin and Calzavara, Martino and Schmiedmayer, J\"org and Calarco, Tommaso and Kugi, Andreas}, booktitle = {Proceedings of the 61st Conference on Decision and Control (CDC)}, title = {Iterative shaping of optical potentials for one-dimensional Bose-Einstein condensates}, doi = {10.1109/CDC51059.2022.9993271}, pages = {5801--5806}, address = {Cancun, Mexico}, month = {12}, year = {2022}, }
Forschungsförderung
Dieses Projekt wird vom Österreichischen Wissenschaftsfond (FWF) [P36236] und der Europäischen Union – NextGenerationEU gefördert.
![]()
21.10.2022 Recycling Heroes
Recycling Heroes – Anwendung von Citizen Science in Schulen um die Kreislaufwirtschaft in der Elektronikindustrie zu fördern
Der Verkauf von elektrischen und elektronischen Geräten steigt permanent und entsprechend ist Elektroschrott bereits der am schnellsten wachsende Abfallstrom der Welt geworden. Unsere Gesellschaft muss sich unverzüglich dieser Herausforderung stellen, um eine nachhaltigere Bewirtschaftung der Ressourcen unseres Planeten zu gewährleisten und Umweltverschmutzung einzudämmen.
Das Projekt Recycling Heroes hat zum Ziel, das Bewusstsein über Elektroschrott vor allem bei Schülerinnen und Schülern aber auch allgemein in der Gesellschaft zu steigern. Dafür werden im Projekt Prinzipien der Kreislaufwirtschaft mit Citizen-Science-Methoden verbunden.
Als Citizen Scientists entwickeln Schülerinnen und Schüler einen umfassenden Fragebogen, um damit ihre Familie oder ihre Nachbarn zu befragen, wofür und über welchen Zeitraum Elektronikprodukte genutzt werden, und wie mit nicht mehr gebrauchten Geräten verfahren wird. Danach analysieren diese die Ergebnisse der Umfrage und überlegen was getan werden könnte, um eine korrekte Entsorgung zu gewährleisten und die Recyclingrate zu erhöhen. Außerdem befassen sich weitere Schülerinnen und Schüler mit der Entwicklung von elektronischen Produkten, welche im Rahmen von anderen aktuellen Citizen Science Projekten verwendet werden können. Dabei können diese neuen Produkte beispielsweise als Mesh-Up von Elektroschrottteilen und Neuteilen im Sinne von „Mach flott den Schrott“ entwickelt werden – Nachhaltigkeit steht hierbei im Fokus! Anschließend werden die entwickelten Prototypen in geringer Anzahl vervielfältigt und an weitere Partner-Schulen im Projekt verteilt. Diese Schulen sollen die Prototypen nutzen, um beispielsweise Daten über Temperatur, Lärm, Feuchtigkeit und Feinstaub in der Schulumgebung zu erheben, welche dann für Citizen Science Projekte zur Verfügung gestellt werden.
Das Projekt Recycling Heroes soll bei den beteiligten Schülerinnen und Schülern umweltbewusstes Verhalten und Recyclingkultur stärken, aber auch das Verständnis für Ökodesign- und Entwicklungsprozesse fördern. Außerdem lernen die Schülerinnen und Schüler im Hinblick auf Citizen Science, passende Erhebungsinstrumente zu entwickeln und ihr wissenschaftliches Denken zu schärfen.
Partners:
Bee produced GmbH
TU Wien, Institut für Automatisierungs- und Regelungstechnik (ACIN)
Beteiligte Schulen:
BS für Elektro-, Veranstaltungs- und Informationstechnik Austria, Wien
BS für Maschinen-, Fertigungstechnik und Elektronik, Wien
HTL Donaustadt, Wien
TGM HTBLVA Wien 20
Funding:
Dieses Projekt wird von „Sparkling Science 2.0“ vom Bundesministerium für Bildung, Wissenschaft und Forschung finanziert.
26.09.2022 Modellierung, Beobachterentwurf und Regelung von Stranggießprozessen
26.09.2022 Modellierung, Beobachterentwurf und Regelung von Materialeigenschaften in Bandbehandlungsanlagen
26.09.2022 Modellierung, Beobachterentwurf und Regelung der Zinkschichtdicke und Oberflächenqualität in Feuerverzinkungsanlagen für Stahlbänder
29.08.2022 Produkt-Startzeit- und Reihenfolgeoptimierung für ein Mehrlinienwalzwerk
Projektschwerpunkte
- Modellierung des zeitlichen Fertigungsverlaufs von Produkten
- Berechnung optimaler Produkt-Startzeitpunkte bei deterministischen und stochastischen Prozesszeiten
- Reihenfolgeoptimierung von Produkten
Beschreibung
In einem Mehrlinienwalzwerk wird Flach- und Stabstahl sowie Draht aus Edelstahl gefertigt. Die Produkte weisen unterschiedliche Fertigungsparameter (Stahlsorte, Profilquerschnitt, Walztemperaturen, Walzgeschwindigkeiten, etc.) auf. Abbildung 1 zeigt ein Schema der Anlage. Zunächst werden die meisten Produkte in einem Hubbalkenofen sowie einzelne Produkte auch in Induktionsöfen auf eine vorgegebene Solltemperatur erwärmt. Im nächsten Schritt folgt das Walzen auf einen quadratischen Zwischenquerschnitt an einem reversierenden Vorgerüst. Danach werden die Produkte in der Profilwalzlinie oder der Flachwalzlinie auf den Endquerschnitt gewalzt.
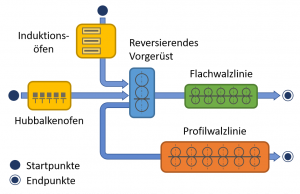
Anlagenübersicht des Mehrlinienwalzwerks.
An der Profilwalzlinie, siehe Abb. 2, sind bei Abmessungsänderungen abschnittsweise Maschinenumrüstungen notwendig. Während dieser Umrüstvorgänge wird an der Flachwalzlinie gefertigt. Für den Durchsatz und somit die Produktivität des gesamten Mehrlinienwalzwerks sind die folgenden Faktoren entscheidend:
- Die Startzeitpunkte der Produkte sollen unter Beachtung aller sicherheitstechnischen Zeitpuffer so gewählt werden, dass der zeitliche Produktabstand minimiert, d.h. der Produktdurchsatz maximiert wird.
- Die Produktreihenfolge soll so gewählt werden, dass die Maschinenumrüstzeiten zufolge unterschiedliche Fertigungsparameter aufeinanderfolgender Produkte minimiert werden.
- Während einer Maschinenumrüstung an der Profilwalzlinie sollen zur Fertigung an der Flachwalzlinie so viele Produkte ausgewählt werden, dass die Gesamtfertigungsdauer dieser Produkte möglichst exakt der Rüstzeit der Profilwalzlinie entspricht, um Stillstände zu vermeiden. Diese Gesamtfertigungsdauer ist dabei ebenfalls von der Reihenfolge der für die Flachwalzlinie ausgewählten Produkte abhängig.

Ausschnitt der Profilwalzlinie.
Als Basis für die Optimierung der Startzeitpunkte werden Modelle zur Berechnung der Prozesszeiten der Produkte für alle relevanten Abschnitte der Anlage entwickelt. Mit diesen Modellen kann der Fertigungsprozess aller Produkte in Form von Zeitpunkten, an denen die Produkte definierte Punkte entlang der Fertigungslinie passieren, berechnet werden. Basierend auf dem Prozessverlauf eines Produkts wird der optimale Startzeitpunkt des nächsten Produkts bestimmt und dem Bedienpersonal über ein Terminal vorgeschlagen.
Die Optimierung der Produktauswahl sowie -reihenfolge stellt ein kombinatorisches Optimierungsproblem dar, das als NP-schwer bekannt ist. Zur näherungsweisen Lösung dieses Problems werden verschiedene heuristische Algorithmen (lokale Suche, Simulated Annealing, Tabu Search) implementiert und analysiert. Weiters wird die Anwendbarkeit von exakten Verfahren (Branch and Bound, Constraint Programming Optimization) zur Auffindung eines Optimums zumindest für Teilprobleme der Reihenfolgeoptimierung untersucht. Die optimierte Produktauswahl und Produktreihenfolge minimiert unproduktive Umrüst- und Stillstandszeiten und maximiert damit den Produktdurchsatz der Anlage.
Ausgewählte Veröffentlichungen
- M. Kowalski, A. Steinboeck, A. Aschauer, and A. Kugi, Optimal Start Times for a Flow Shop with Blocking Constraints, No-Wait Constraints, and Stochastic Processing Times, in Proceedings of the 17th IFAC Symposium on Information Control Problems in Manufacturing INCOM 2021, Budapest, Hungary, 2021, pp. 659-664.
[BibTex]@InProceedings{Kowalski2021, author = {M. Kowalski and A. Steinboeck and A. Aschauer and A. Kugi}, booktitle = {Proceedings of the 17th IFAC Symposium on Information Control Problems in Manufacturing INCOM 2021}, title = {Optimal Start Times for a Flow Shop with Blocking Constraints, No-Wait Constraints, and Stochastic Processing Times}, doi = {10.1016/j.ifacol.2021.08.176}, note = {17th IFAC Symposium on Information Control Problems in Manufacturing INCOM 2021}, number = {1}, pages = {659-664}, url = {https://www.sciencedirect.com/science/article/pii/S2405896321009460}, volume = {54}, address = {Budapest, Hungary}, issn = {2405-8963}, journal = {IFAC-PapersOnLine}, year = {2021}, }
- M. Kowalski, A. Steinboeck, and A. Kugi, Scheduling Multiple Groups of Jobs for a Multi-Line Steel Hot Rolling Mill, in Proceedings of the 19th IFAC Symposium on Control, Optimization and Automation in Mining, Mineral and Metal Processing MMM, Montreal, Canada, 2022, p. 168–173.
[BibTex]@InProceedings{Kowalski2022, author = {M. Kowalski and A. Steinboeck and A. Kugi}, booktitle = {Proceedings of the 19th IFAC Symposium on Control, Optimization and Automation in Mining, Mineral and Metal Processing MMM}, title = {Scheduling Multiple Groups of Jobs for a Multi-Line Steel Hot Rolling Mill}, doi = {10.1016/j.ifacol.2022.09.262}, note = {IFAC-PapersOnLine}, number = {21}, pages = {168--173}, volume = {55}, address = {Montreal, Canada}, month = {08}, year = {2022}, }
Anwendungsbereiche
- Walzwerksautomatisierung
- Zeit- und Reihenfolgeoptimierung in Produktionsprozessen