V4R Publikationen
Ausgewählte Publikationen des Vision for Robotics (V4R) Labors. Zusätzliche Publikationen finden sich auf Google Scholar.
2025
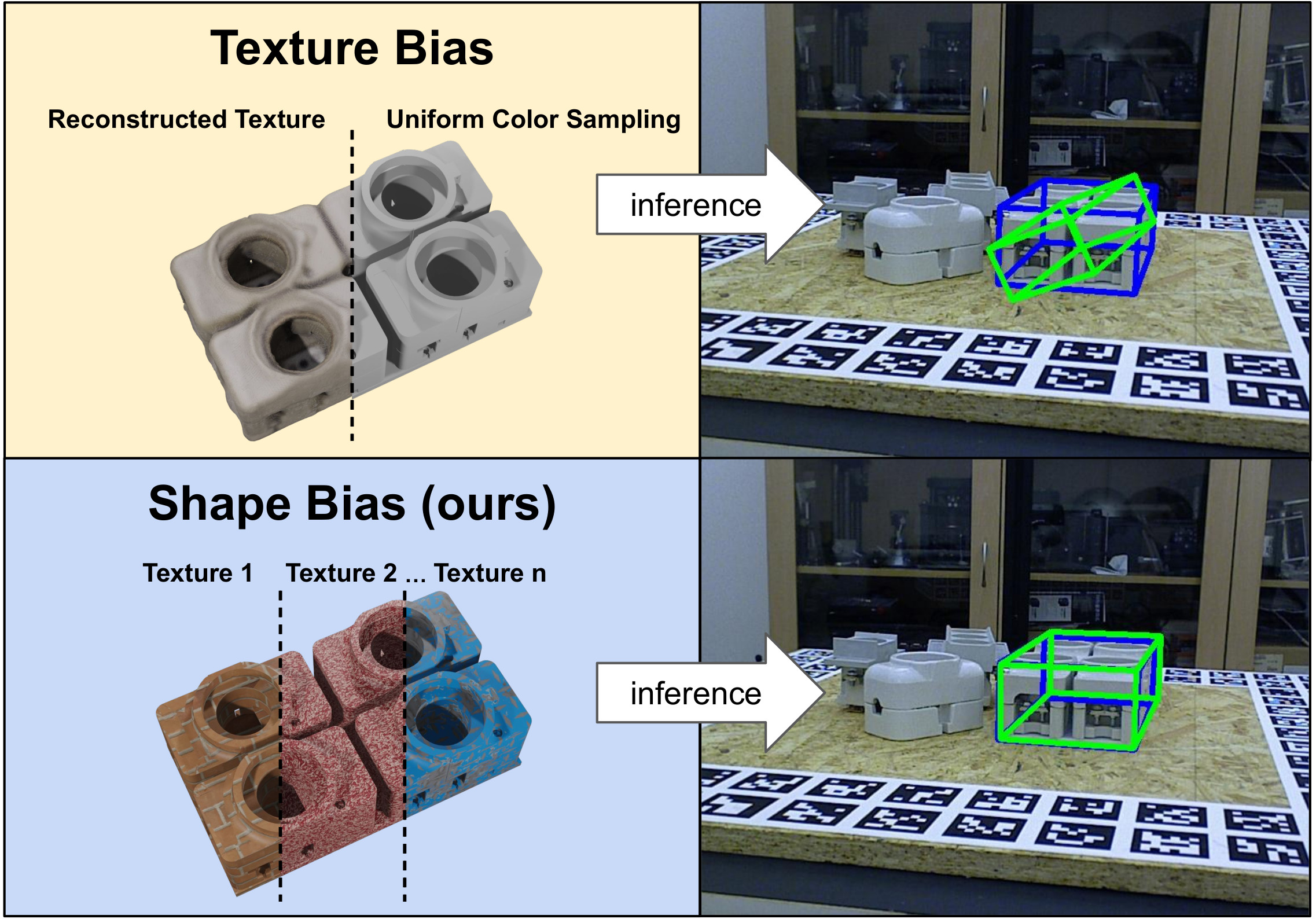 |
Shape-biased Texture Agnostic Representations for Improved Textureless and Metallic Object Detection and 6D Pose Estimation Peter Hönig, Stefan Thalhammer, Jean-Baptiste Weibel, Matthias Hirschmanner, and Markus Vincze accepted at IEEE/CVF Winter Conference on Applications of Computer Vision |
2024
 |
Challenges for Monocular 6-D Object Pose Estimation in Robotics Stefan Thalhammer, Dominik Bauer, Peter Hönig, Jean-Baptiste Weibel, José García-Rodríguez, and Markus Vincze IEEE Transactions on Robotics |
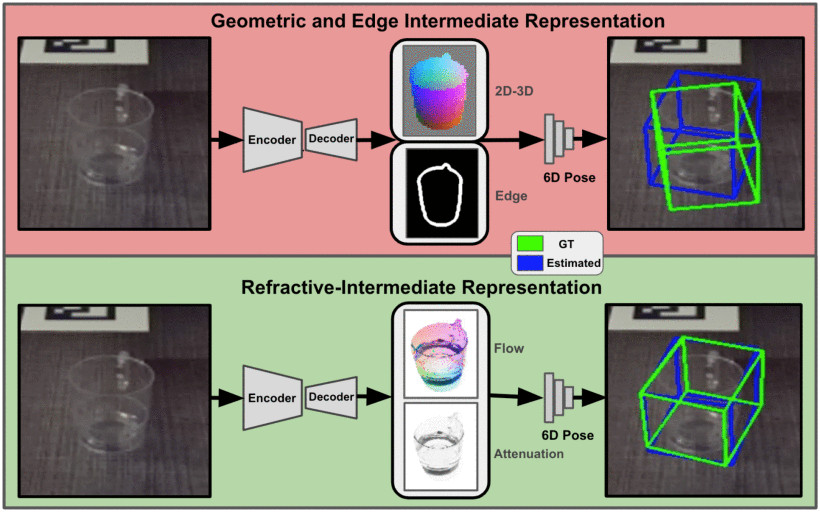 |
ReFlow6D: Refraction-Guided Transparent Object 6D Pose Estimation via Intermediate Representation Learning Hrishikesh Gupta, Stefan Thalhammer, Jean-Baptiste Weibel, Alexander Haberl, and Markus Vincze IEEE Robotics and Automation Letters |
 |
ZS6D: Zero-shot 6D Object Pose Estimation using Vision Transformers Philipp Ausserlechner, David Haberger, Stefan Thalhammer, Jean-Baptiste Weibel, and Markus Vincze IEEE International Conference on Robotics and Automation |
2023
 |
COPE: End-to-end trainable Constant Runtime Object Pose Estimation Stefan Thalhammer, Timothy Patten and Markus Vincze IEEE/CVF Winter Conference on Applications of Computer Vision PDF | Code |
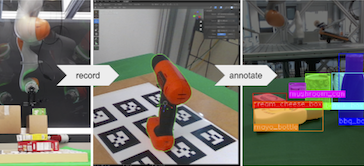 |
3D-DAT: 3D-Dataset Annotation Toolkit for Robotic Vision Markus Suchi, Bernhard Neuberger, Amanzhol Salykov, Jean-Baptiste Weibel, Timothy Patten, and Markus Vincze IEEE International Conference on Robotics and Automation PDF | Code |
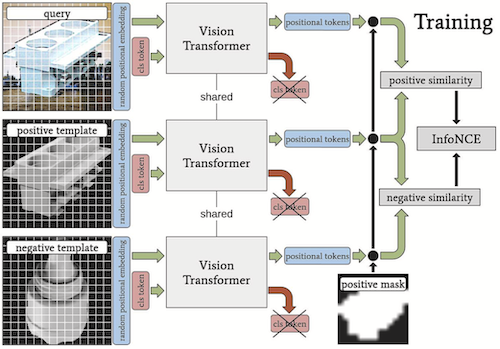 |
Self-supervised Vision Transformers for 3D pose estimation of novel objects Stefan Thalhammer, Jean-Baptiste Weibel, Markus Vincze, and Jose Garcia-Rodriguez Journal on Image and Vision Computing |
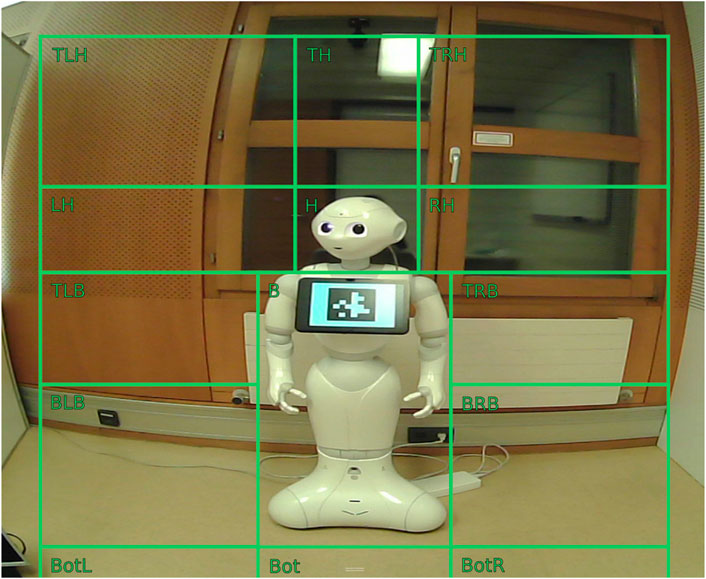 |
Robotic gaze and human views: A systematic exploration of robotic gaze aversion and its effects on human behaviors and attitudes Michael Koller, Astrid Weiss, Matthias Hirschmanner, and Markus Vincze Frontiers in Robotics and AI |
2022
 |
SporeAgent: Reinforced Scene-level Plausibility for Object Pose Refinement Dominik Bauer, Timothy Patten and Markus Vincze IEEE/CVF Winter Conference on Applications of Computer Vision (WACV) PDF | Code |
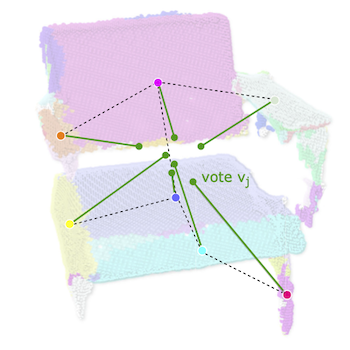 |
Robust Sim2Real 3D Object Classification Using Graph Representations and a Deep Center Voting Scheme Jean-Baptiste Weibel, Timothy Patten, and Markus Vincze IEEE Robotics and Automation Letters |
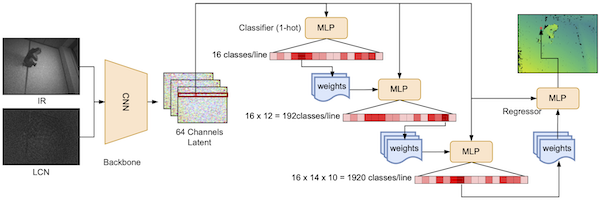 |
GigaDepth: Learning Depth from Structured Light with Branching Neural Networks Simon Schreiberhuber, Jean-Baptiste Weibel, Timothy Patten, and Markus Vincze European Conference on Computer Vision (ECCV) |
 |
A New VR Kitchen Environment for Recording Well Annotated Object Interaction Tasks Michael Koller, Timothy Patten and Markus Vincze ACM/IEEE International Conference on Human-Robot Interaction (HRI) Project page | Code |
2021
| Investigating Transparency Methods in a Robot Word-Learning System and Their Effects on Human Teaching Behaviors Matthias Hirschmanner, Stephanie Gross, Setareh Zafari, Brigitte Krenn, Friedrich Neubarth, Markus Vincze IEEE International Conference on Robot & Human Interactive Communication (RO-MAN) Project Page |