08.06.2015 ER4STEM
Educational Robotics for STEM
Many children lose their natural curiosity for how things function and interrelate to each other along the way into their lives as young adults. The Educational Robotics for STEM (ER4STEM) project aims to turn curious young children into young adults passionate about science and technology with a hands-on use case: robotics. The domain of robotics represents a multidisciplinary and highly innovative field encompassing physics, maths, informatics and even industrial design as well as social sciences. Moreover, due to various application domains, teamwork, creativity and entrepreneurial skills are required for the design, programming and innovative exploitation of robots and robotic services. Children are fascinated by such autonomous machines. This fascination and the variety of fields and topics covered make robotics a powerful idea to engage with. Young girls as well as boys can easily connect robots to their personal interests and share their ideas through these tangible artefacts.
ER4STEM will refine, unify and enhance current European approaches to STEM education through robotics in one open operational and conceptual framework. The concept is founded on three important pillars of constructionism: 1. engaging with powerful ideas, 2. building on personal interests, and 3. learning through making (or presenting ideas with tangible artefacts). The ER4STEM framework will coherently offer students aged 7 to 18 as well as their educators different perspectives and approaches to find their interests and strengths in robotics to pursue STEM careers through robotics and semi-autonomous smart devices. At the same time students will learn about technology (e.g. circuits), about a domain (e.g. math) and acquire skills (e.g. collaborating, coding). Innovative approaches will be developed to achieve an integrated and consistent concept that picks children up at different ages, beginning in primary school and accompany them until graduation from secondary school.
Partners
- European Software Institute Center Eastern Europe
- Practical Robotics Institute Austria
- University of Athens Educational Technology Lab
- AcrossLimits
- Cardiff University School of Social Science
- Certicon
Funding
- EU H2020-SEAC-2014-1
29.03.2015 FLOBOT
Washing Robot for Professional Users
Supermarkets, as well as other industrial, commercial, civil and service premises such as Airports, Trade fairs, Hospitals, Sport courts have huge floor surfaces to be cleaned daily and during the day. These activities are time demanding in terms of human repetitive activities. They take place at various times, often with a tight schedule depending on the kind of premise and available time slots as well as organisational issues of the tenant of the premise; often the personnel have to be present on standby on the premises to be cleaned. Additionally, cleaning services often have problems related to workers’ health and ergonomics. The economic viability of the companies commonly relies on low wages and low-skills personnel. Therefore the floor washing activities are best suited for robotisation.
Currently, it does not exist a robot that satisfies the requirements of the professional users and cleaning services companies in terms of both cleaning performance and in terms of cost. The robotised floor washing tasks are demanding under many aspects: autonomy of operation, precision of the navigation, safety with regards to humans and goods, interaction with the personnel, easy set-up of path and tasks sequences without complex reprogramming.
FLOBOT addresses these problems integrating existing research results into a professional floor washing robot platform for wide area industrial, civil and commercial premises. The result will be a TRL-8 prototype, tested in a real operating environment. The project derives requirements from professional users and implements case validations in four kinds of premises.
The FLOBOT will be a professional robot scrubber with suction to dry the floor. The system consists of a mobile platform (robot) and of a docking station. It includes software modules for human tracking for safety, floor cleaning intelligence, navigation and mapping, mission programming and connection to the data management ERP of the users.
Funding
- Horizon 2020 Programme (H2020-ICT-2014-1, Grant agreement no: 645376).
14.07.2014 Schräge Roboter
Das kreative Mitmachlabor kommt in die Schule
Schräge Roboter ist ein Wissenschaftskommunikationsprojekt der Gruppe Vision for Robotics, gefördert vom FWF Wissenschaftsfonds. Das Ziel des Projektes ist es Schülerinnen und Schülern Robotik aus der Produktentwicklungsperspektive näherzubringen und dabei alle SchülerInnen anzusprechen (nicht nur jene, die bereits an Mathematik, Informatik, Naturwissenschaften und Technik – MINT – Fächern interessiert sind). Eine Besonderheit des Projektes ist die Umsetzung nach den Prinzipien des benutzerzentrierten Designs, das nicht nur die Interessen der SchülerInnen und LehrerInnen in den Mittelpunkt stellt, sondern auch andere Stakeholder wie Eltern miteinbezieht.
Das Projektkonzept basiert auf dem „5-Schritte Plan“ und dem „Projektauftrag mit dem Mattie Roboter“. Beide Konzepte und der Roboter wurden von der TU Wien eigens für Kinder entwickelt. Dabei haben die WisschaftlerInnen zwei Ziele:
- Das Projekt soll SchülerInnen, LehrerInnen und interessierten Eltern einen Einblick in die Robotik bieten und dabei verschiedene Perspektiven aufzeigen, z.B. nicht nur die technische, sondern auch sozialwissenschaftliche oder wirtschaftliche Perspektiven. Weiters sollen Kinder herausfinden wie ihre Interessen und persönlichen Stärken in der Robotik zum Einsatz kommen können.
- Nebenbei soll das Projekt auch die Wirksamkeit des Konzeptes und, wenn gegeben, die Umsetzbarkeit der Ideen der Kinder in reale Produkte oder Serviceleistungen in der Robotik untersuchen.

Das Projekt hat mit März 2014 begonnen. Nach einer Planungs- und Entwicklungsphase sowie der Kontaktaufnahme zu den Pilotschulen ist die Umsetzung seit Oktober 2014 in vollem Gange. Fünf AHS aus Wien und Umgebung nehmen mit einer 2. oder 3. Klasse (mit ihren LehrerInnen aus Werken oder Physik) am Projekt teil.
Im Detail schaut das Projekt folgendermaßen aus: Jede Klasse lernt über den Produktentwicklungsprozess eines Roboters in drei Workshops verteilt über ein Schulsemester. Jeder Workshop symbolisiert eine prägnante Phase der Produktentwicklung.
Angefangen wird mit der Ideenphase im ersten Workshop „Konzept“, wo die SchülerInnen mit Hilfe des 5-Schritte Plans – einer Struktur, die ihnen hilft ihre Ideen zu ordnen – einen ersten Roboter entwerfen und ein Modell aus Modelliermasse gestalten.
Im zweiten Workshop „Experten“ besucht die Klasse das Vision for Robotics Lab und lernt Robotikexperten kennen, die ihnen während einer Demo über ihre Arbeit – die Bildverarbeitung – erzählen. Danach bekommen die SchülerInnen einen Projektauftrag der Geschäftsleitung der Schräge Roboter GmbH, um einen ersten Prototypen eines Roboters für Kinder zu bauen. Dabei dürfen sie sich entscheiden, ob sie in die Teams Konstruktion, Mensch-Roboter-Interaktion, Forschung&Entwicklung, Design oder Marketing&Vertrieb gehen.
Im dritten Workshop kommen alle Teams zusammen und die verschiedenen Roboterteile werden zusammengefügt. Anschließend wird der Prototyp aus zwei Perspektiven evaluiert: technisch und benutzerorientiert. Zum Abschluss wird die Produktidee der Geschäftsleitung präsentiert und der Prototyp vorgeführt.
Zwischen den Workshops haben die LehrerInnen die Möglichkeit mit der Klasse die Workshops Revue zu passieren und Herausforderungen oder Enttäuschungen näher zu analysieren.
08.06.2014 SQUIRREL
Clearing Clutter Bit by Bit
Clutter in an open world is a challenge for many aspects of robotic systems, especially for autonomous robots deployed in unstructured domestic settings, affecting navigation, manipulation, vision, human robot interaction and planning.

Squirrel addresses these issues by actively controlling clutter and incrementally learning to extend the robot’s capabilities while doing so. We term this the B3 (bit by bit) approach, as the robot tackles clutter one bit at a time and also extends its knowledge continuously as new bits of information become available. Squirrel is inspired by a user driven scenario, that exhibits all the rich complexity required to convincingly drive research, but allows tractable solutions with high potential for exploitation. We propose a toy cleaning scenario, where a robot learns to collect toys scattered in loose clumps or tangled heaps on the floor in a child’s room, and to stow them in designated target locations.
We will advance science w.r.t. manipulation, where we will incrementally learn grasp affordances with a dexterous hand; segmenting and learning objects and object category models from a cluttered scene; localisation and navigation in a crowded and changing scene based on incrementally built 3D environment models; iterative task planning in an open world; and engaging with multiple users in a dynamic collaborative task.
Progress will be measured in scenarios of increasing complexity, starting with known object classes, via incremental learning of objects and grasp affordances to the full system with failure recovery and active control of clutter, instantiated on two different robot platforms. Systems will be evaluated in nurseries and day cares, where children playfully engage with the robot to teach it to how to clean up.
Partners
- Technische Universität Wien, Institut für Automatisierungs- und Regelungstechnik
- Albert-Ludwigs-Universität Freiburg
- Universität Innsbruck
- King’s College London
- University of Twente
- Frauenhofer IPA
- Festo Didactic
- IDMind
- Verein Pädagogische Initiative 2-10
Funding
FP7 No. 610532.
08.06.2014 Argonauts
Argo Challenge von Total
Total has launched in December 2013, the ARGOS Challenge (Autonomous Robot for Gas and Oil Sites), an international robotics competition designed to foster the development of a new generation of autonomous robots adapted to the oil and gas sites. These robots will be capable of performing inspection tasks, detecting anomalies and intervening in emergency situations.
In June 2014, five teams from Austria, Spain, France, Japan and Switzerland were selected to take part in the ARGOS challenge. They have less than three years to design and build the first autonomous surface robot complying with ATEX/ IECEx standards*. The robot will be able to operate in specific environments encountered in the oil and gas industry.
By launching this challenge in partnership with the French National Research Agency (ANR), Total has adopted an open innovation strategy. The aim was to involve associations in robotics, partly to make them more aware of the operating constraints encountered in oil and gas production activities, and partly to encourage them to suggest innovative robotics solutions, providing answers to the problems we encounter, and increasing safety for our personnel.
Partners
5 teams Argonauts, Foxiris, Vikings, Air-K and Lio and come from Austria, Spain, France, Japan and Switzerland
Funding
Total Challenge operated by ANR (Total) and EuroSTAR
14.07.2013 FRANC
Field Robot for Advanced Navigation in bio Crops
Während in der modernen Landwirtschaft zunehmend leistungsfähige komplexe Maschinen mit hochentwickelter Technologie eingesetzt werden, ist der Biolandbau vielfach von manuellen Arbeiten geprägt. Im Projekt FRANC wird ein autonomes Fahrzeug entwickelt und gebaut, welches speziell im Biolandbau eingesetzt werden kann. Das Fahrzeug wird mit der nötigen Antriebs- und Sensortechnik sowie Steuerungshardware und -software ausgestattet um selbständig durch Reihenkulturen fahren zu können. Das Fahrzeug wird vollständig elektrisch angetrieben. Durch lenkbare Vorder- und Hinterachsen werden enge Wenderadien ermöglichen. Ein modularer Aufbau des Fahrzeugs soll eine leichte Adaption an das Arbeitsumfeld ermöglichen.
Um zu gewährleisten, dass das Fahrzeug bei Kollisionsgefahr unmittelbar und verzögerungsfrei zum Stehen gebracht und in einen sicheren Betriebszustand versetzt werden kann, wird ein eigenes Schutzkonzept entwickelt. Im Hinblick auf die Sicherheitstechnik wird davon ausgegangen, dass das Fahrzeug vorerst nicht unbeaufsichtigt eingesetzt wird. Der Feldroboter soll mittels Fernsteuerung bedient werden können, die jederzeit einen Eingriff in die Fahrzeugsteuerung erlaubt.
Mit diesem Projekt wird die Schulausbildung an eine sehr bedeutende technologische Entwicklung in der Landtechnik herangeführt. Dabei soll vor allem das Interesse der Schüler an der Robotik geweckt werden. Der Einsatz moderner Technologien (Sensortechnik, Navigation, Antriebstechnik, Steuerungstechnik, etc.) kann sehr anschaulich vermittelt werden. Das Projekt bietet weiter ein großes Forschungspotenzial: Der Trend in der Entwicklung geht hin zur individuellen Erkennung und Behandlung einzelner Pflanzen. Damit sind Aufgabenstellungen verbunden, die weit über das Projektziel hinausreichen und es wird damit die Basis für eine zukünftige und langjährige Zusammenarbeit mit den Projektpartnern darstellen.
Projektpartner
- Technische Universität Wien, Institut für Automatisierungs- und Regelungstechnik
- Josephinum Research
- Hochschule Osnabrück, Fakultät Ingenieurwissenschaften und Informatik
- Bio Lutz GmbH
- BLT Wieslburg
- Höhere Bundeslehr- und Forschungsanstalt Francisco Josephinum
- Höhere Technische Bundeslehr- und Versuchsanstalt Waidhofen an der Ybbs
Funding
FRANC wird gefördert durch Sparkling Science, einem Forschungsprogramm des Bundesministeriums für Wissenschaft und Forschung.
09.06.2013 STRANDS
Spatio-Temporal Representations and Activities for Cognitive Control in Long-Term Scenarios
STRANDS aims to enable a robot to achieve robust and intelligent behaviour in human environments through adaptation to, and the exploitation of, long-term experience. Our approach is based on understanding 3D space and how it changes over time, from milliseconds to months.
We will develop novel approaches to extract quantitative and qualitative spatio-temporal structure from sensor data gathered during months of autonomous operation. Extracted structure will include reoccurring geometric primitives, objects, people, and models of activity. We will also develop control mechanisms which exploit these structures to yield adaptive behaviour in highly demanding, real-world security and care scenarios.
The spatio-temporal dynamics presented by such scenarios (e.g. humans moving, furniture changing position, objects (re-)appearing) are largely treated as anomalous readings by state-of-the-art robots. Errors introduced by these readings accumulate over the lifetime of such systems, preventing many of them from running for more than a few hours. By autonomously modelling spatio-temporal dynamics, our robots will be able run for significantly longer than current systems (at least 120 days by the end of the project). Long runtimes provide previously unattainable opportunities for a robot to learn about its world. Our systems will take these opportunities, advancing long-term mapping, life-long learning about objects, person tracking, human activity recognition and self-motivated behaviour generation.
We will integrate our advances into complete cognitive systems to be deployed and evaluated at two end-user sites. The tasks these systems will perform are impossible without long-term adaptation to spatio-temporal dynamics, yet they are tasks demanded by early adopters of cognitive robots. We will measure our progress by benchmarking these systems against detailed user requirements and a range of objective criteria including measures of system runtime and autonomous behaviour.
Partners
- Technische Universität Wien, Institut für Automatisierungs- und Regelungstechnik
- University of Birmingham
- Akademie für Altersforschung am Haus der Barmherzigkeit
- G4S Technology Ltd
- Kungliga Tekniska Högskolan
- Rheinisch-Westfäische Technische Hochschule Aachen
- University of Leeds
- University of Lincoln
Funding
FP7 no. 600623
01.01.2013 Atomic Force Microscopy capable of vibration isolation (Vibrostop AFM)
Project focus
- Development of an AFM that is capable of vibration isolation, potentially for on-site imaging.
- Mechanical design and motion control to achieve high vibration rejection and isolation.
Description
An atomic force microscope (AFM) can image and inspect a sample surface with high resolution by scanning a probe with a sharp tip over the sample. During scanning, the vertical position of the probe with respect to the sample typically needs to be regulated with nanometer resolution. For the required high resolution, AFMs are sensitive to vibrations transmitted from the floor dependent on their design. Particularly when AFMs are designed to image large samples or when they include relatively heavy components (e.g. stepper motors for user-friendly automated AFMs), they have mechanical resonances at low frequencies. Floor vibration can excite these resonances, creating artifacts on AFM images by changing the probe-sample distance. Therefore, AFMs are usually mounted on vibration isolators and operated in quiet environments. Overall, the vibration sensitivity is a weakness of AFMs, restricting the measurement sites.
In order to enable on-site AFM imaging and inline metrology by overcoming that weakness, vibration isolation is integrated in an AFM in this project. The principle of the vibration isolation along the vertical Z axis is shown in Fig. 1, where an AFM head with a probe is attached to a moving platform that is vertically moved by vibration rejection actuators. These actuators maintain the distance between the AFM probe and the sample such that AFM images can be generated in a vibrational environment. This project focuses on the mechatronic system design of the proposed system, including selection of precision actuators, as well as mechanical component design and motion control.
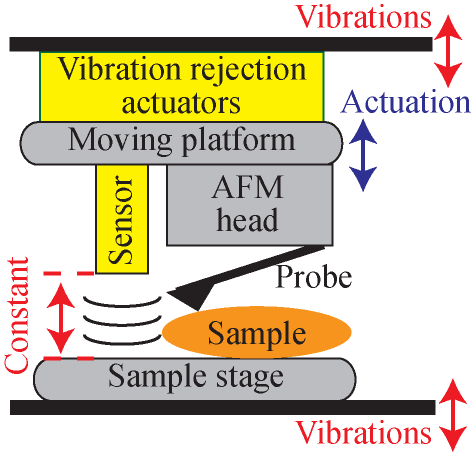
Principle of the vibration isolation integrated in an AFM.
Mechatronic Design
Due to their small size and high linearity without backlash and friction present in typical bearings, Lorentz actuators (voice coil actuators) are selected and guided by leaf spring flexures as the vibration rejection actuators. After they are attached to the moving platform, its frequency response is measured from the control input to the platform position, as shown in Fig. 2.
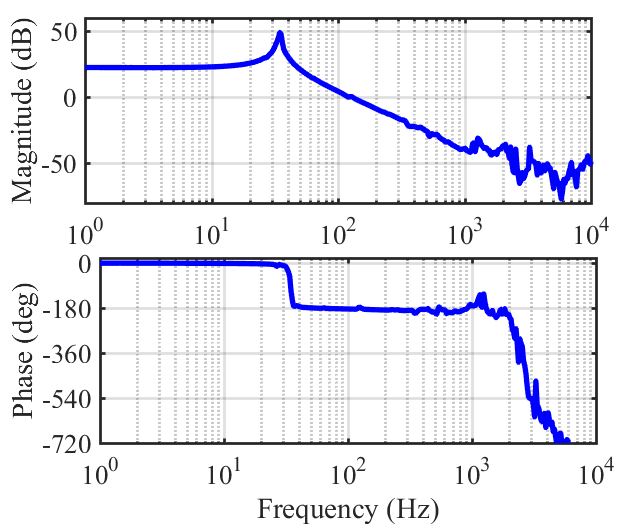
Measured Bode plot of the moving platform from the control input to the resulting platform position [Ito et al., Mechatronics, 44, 2017].
Precision Motion Control
The vibrations between the probe and the sample are detected by the displacement sensor in Fig. 1, and they are rejected by using a feedback controller. When the resulting closed-loop system has a control bandwidth significantly higher than the suspension mode’s frequency, the positioning system attains a high immunity against floor vibrations [Ito et al., IEEE TMECH, 21(2), 2016]. In this case, the suspension mode at 35 Hz can be used to increase the open-loop gain for better vibration rejection. For verification, the sensitivity function is measured as shown in Fig. 3(a), where a deep notch is visible at 35 Hz. This notch is especially beneficial for the moving platform to track the sample.
In addition to the sample tracking, the moving platform must isolate the vibrations from the actuators’ base (i.e. the upper vibrating plate in Fig.1). In order to validate the vibration isolation performance, the transmissibility is simulated based on a nominal plant model, as shown in Fig. 3(b). When the feedback controller is turned off, the response shows a high peak at 35 Hz because the floor vibrations strongly excite the suspension mode. However, this peak can be perfectly trimmed by turning on the feedback controller, which is due to the 35 Hz deep notch in Fig. 3(a). Consequently, the proposed system realizes the transmissibility that is smaller than 0 dB in the entire frequency range for high vibration isolation. Note that realization of such transmissibility is difficult by piezoelectric actuators, which are commonly used in AFMs.
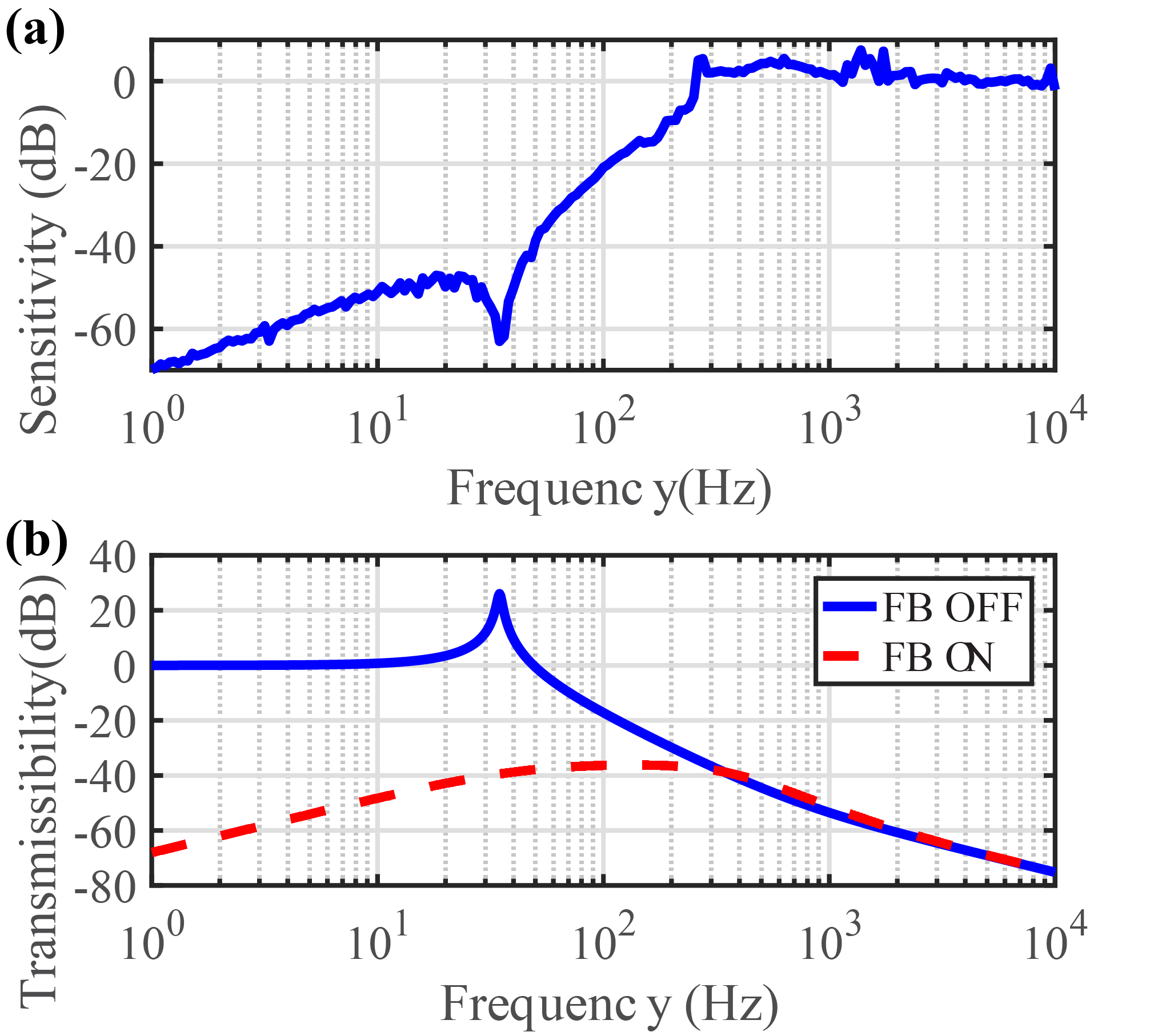
(a) Measured sensitivity function, and (b) simulated transmissibility when the feedback controller is turned off and on [Ito et al., Mechatronics, 44, 2017].
Scientific Imaging and Metrology Systems
For an experimental demonstration, the proposed AFM system is operated without external vibration isolation on the fourth floor of a building directly under which the subway runs. According to the Vibration Criterion [Amick et al., SPIE, 5933, Aug. 2005], the environment is not suitable for high resolution imaging systems .
Fig. 4 shows images of a calibration grating with a height of 114 nm. When the feedback control is turned off (Fig.4(a)), the sample features are not clearly visible due to the grainy stripes resulting from the floor vibrations although they might be roughly guessed. However, by turning on the feedback controller in Fig. 4(b), the circular features can be clearly distinguished. Overall, the experimental results successfully demonstrate the effectiveness of the proposed AFM system that enables AFM imaging in vibrational environment.
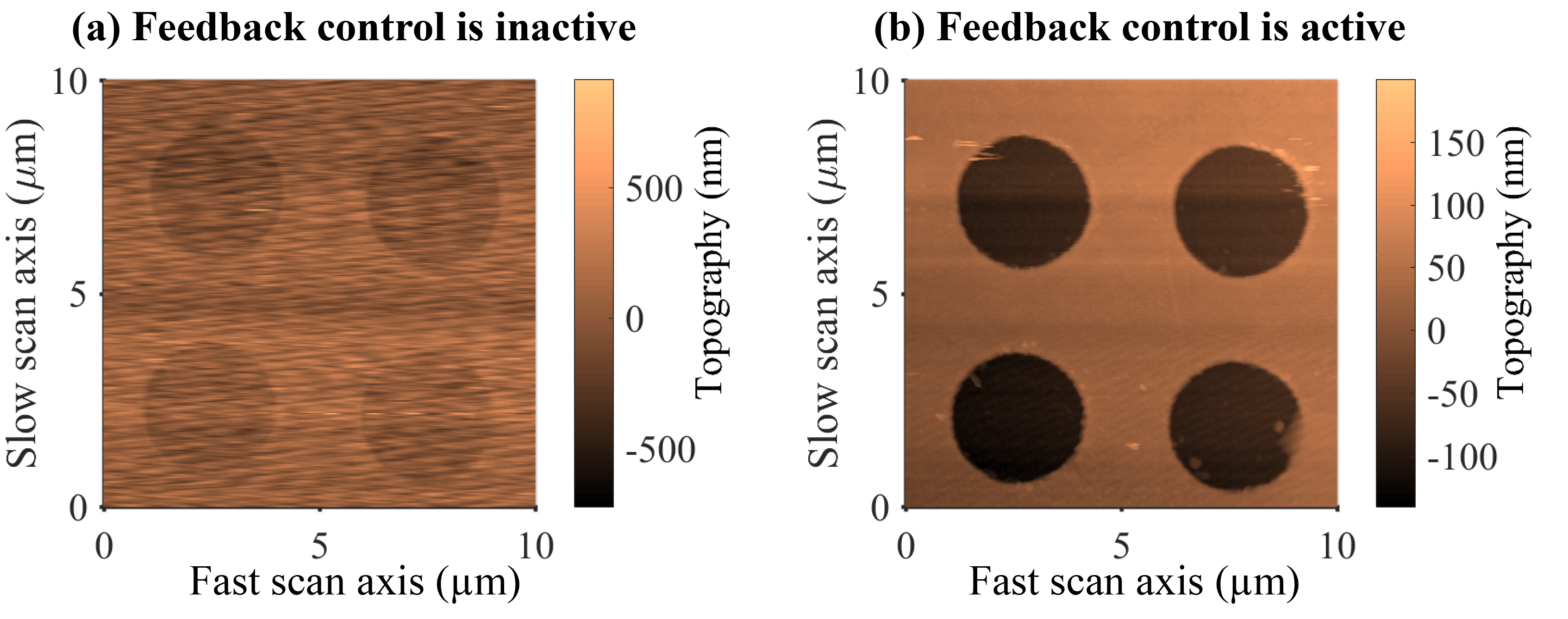
Topography images generated by the proposed AFM system when the feedback controller is (a) turned off and (b) turned on. See [Ito et al., Mechatronics, 44, 2017] for more results and analysis.
Applications
- In-line and on-line metrology
- On-site atomic force microscopy (e.g. during field trips)
Related publications
Journal articles
- S. Ito, S. Unger, and G. Schitter, Vibration isolator carrying atomic force microscope’s head, Mechatronics, vol. 44, p. 32–41, 2017.
[BibTex] [Download]@Article{TUW-259386, Title = {Vibration isolator carrying atomic force microscope's head}, Author = {Ito, Shingo and Unger, Severin and Schitter, Georg}, Journal = {Mechatronics}, Year = {2017}, Pages = {32--41}, Volume = {44}, Doi = {10.1016/j.mechatronics.2017.04.008}, }
- S. Ito and G. Schitter, Comparison and Classification of High-precision Actuators Based on Stiffness Influencing Vibration Isolation, IEEE/ASME Transactions on Mechatronics, vol. 21(2), 2016.
[BibTex] [Download]@Article{TUW-241933, Title = {Comparison and Classification of High-precision Actuators Based on Stiffness Influencing Vibration Isolation}, Author = {Ito, Shingo and Schitter, Georg}, Journal = {IEEE/ASME Transactions on Mechatronics}, Year = {2016}, Volume = {21(2)}, Doi = {10.1109/TMECH.2015.2478658}, Keywords = {Motion control, actuators, vibrations}, Numpages = {10}, }
- S. Ito, J. Steininger, and G. Schitter, Low-stiffness Dual Stage Actuator for Long Rage Positioning with Nanometer Resolution, Mechatronics, vol. 29, p. 46–56, 2015.
[BibTex] [Download]@Article{TUW-240765, Title = {Low-stiffness Dual Stage Actuator for Long Rage Positioning with Nanometer Resolution}, Author = {Ito, Shingo and Steininger, J{\"u}rgen and Schitter, Georg}, Journal = {Mechatronics}, Year = {2015}, Pages = {46--56}, Volume = {29}, Doi = {10.1016/j.mechatronics.2015.05.007}, }
Selected conference publications
- S. Ito, F. Cigarini, S. Unger, and G. Schitter, Flexure design for precision positioning using low-stiffness actuators, in Proceedings of the 7th IFAC Symposium on Mechatronic Systems, 2016, p. 200–205.
[BibTex]@InProceedings{TUW-251121, Title = {Flexure design for precision positioning using low-stiffness actuators}, Author = {Ito, Shingo and Cigarini, Francesco and Unger, Severin and Schitter, Georg}, Booktitle = {Proceedings of the 7th IFAC Symposium on Mechatronic Systems}, Year = {2016}, Note = {Posterpr{\"a}sentation: 7th IFAC Symposium on Mechatronic Systems {\&} 15th Mechatronics Forum International Conference, Loughborough (Vereinigte K{\"o}nigreich); 2016-09-05 -- 2016-09-08}, Pages = {200--205}, Doi = {10.1016/j.ifacol.2016.10.548}, Keywords = {Flexure, Lorentz actuator, voice coil motor, precision positioning} }
Project partners
Funding
01.01.2013 Component-based design of industrial control applications utilizing formal methods
Project Goals
- Development of a modeling environment for automation software components
- Integration of the modeling environment into CodeSys framework
- Automatic generation of partial control applications based on engineering knowledge
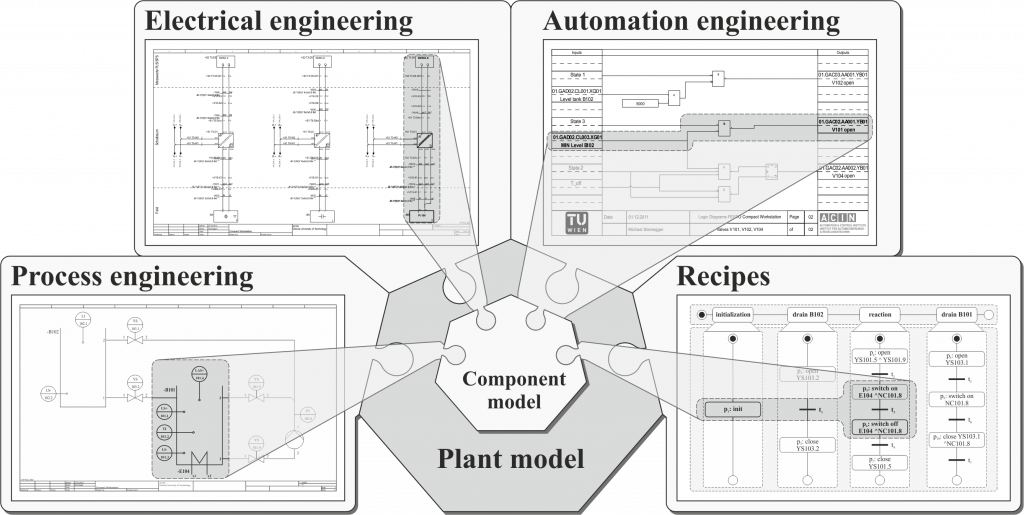
Plant and component model
Description
The engineering of highly automated production systems involves a variety of experts from different engineering disciplines, where most of them contribute at least to a sub-part of the control application for the engineered plant. One of the main objectives of today’s research activities in industrial automation is to simplify the engineering process for control and monitoring applications. The most promising approaches is to design and apply standardized software components, which enables non-experts to design such control or monitoring applications on a more abstract level as shown in Fig. 1. Such a software component has to meet several requirements. It has to contain and provide the description of aspects of the plant, control application and possible faults (hardware as well as software specific) in a standardized way. Furthermore, information about the interface, component behavior, and provided or consumed services have to be provided.
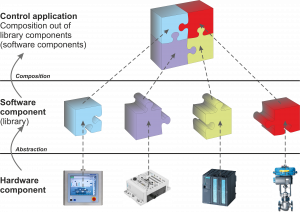
Modular design of control applications based on software components
Automation and Industrial Control Systems
Component-based control application design by applying knowledge-based methods
The project scope includes the development of a library of standardized software components. Such software components enable a simplified implementation of industrial control applications by composition of such components on an abstract level. Furthermore, the library components already define integrated basic control functionality of the underlying hardware component and provide services for connecting several components in a flexible manner with each other (application integration). The provided library can further be easily extended by the users (engineering of new components or extension of existing software components). Thus, the implementation of the control sequence is realized with standardized modules, provided component services, and integrated control functionality. Also a hierarchical aggregation and modelling of the software component is possible. The control specification created by the application engineer can then be automatically transformed into executable control code, e.g. for Programmable Logic Controllers (PLCs). Furthermore, the automatic code generation based on knowledge-based approaches enables the generation of control functionality, where its specification is elaborated during preceding engineering phases in standardized engineering artifacts (e.g., wiring diagrams, piping and instrumentation diagrams, mechanical plans).
Component-based development of fault detection systems in industrial automation
A major goal of the project – beside the above mentioned simplification of the engineering of control applications – is the automated generation of a reliable system to detect and identify abnormal system states. Every unexpected failure in a production plant entails the possibility of damages and downtime due to emergency shutdowns. To shorten the downtime and to support repair work and maintenance, the integration of a fault detection and identification (FDI) system is necessary. The implementation effort of such systems in modern production plants grows disproportionately with the complexity and size of the plant.
By adding the aspects of fault detection to the library components, the automated generation of a FDI-system is enabled, leading to a considerable reduction of implementation effort. Furthermore, the system is highly flexible and scalable, due to the encapsulation of functionalities in software components. Since the concept is based on engineering data, the system can already be used during commissioning of the plant, thereby shortening the commissioning time.
Applications
- Industrial engineering
- Modular manufacturing plants
Related publications
- M. Steinegger, M. Melik-Merkumians, J. Zajc, and G. Schitter, Automatic Generation of Diagnostic Handling Code for Decentralized PLC-based Control Architectures, in Proceedings of 2016 IEEE 21th Conference on Emerging Technologies & Factory Automation, 2016, p. 1–8.
[BibTex]@InProceedings{TUW-252236, Title = {Automatic Generation of Diagnostic Handling Code for Decentralized PLC-based Control Architectures}, Author = {Steinegger, Michael and Melik-Merkumians, Martin and Zajc, Johannes and Schitter, Georg}, Booktitle = {Proceedings of 2016 IEEE 21th Conference on Emerging Technologies {\&} Factory Automation}, Year = {2016}, Note = {Vortrag: 21st IEEE International Conference on Emerging Technologies and Factory Automation (ETFA 2016), Berlin; 2016-09-06 -- 2016-09-09}, Pages = {1--8}, Doi = {10.1109/ETFA.2016.7733694}, ISBN = {978-1-5090-1314-2} }
- M. Steinegger and A. Zoitl, Automated Code Generation for Programmable Logic Controllers based on Knowledge Acquisition from Engineering Artifacts: Concept and Case Study., in Proceedings of the 17th IEEE International Conference on Emerging Technologies and Factory Automation, 2012, pp. 1-8.
[BibTex]@InProceedings{TUW-221320, Title = {Automated Code Generation for Programmable Logic Controllers based on Knowledge Acquisition from Engineering Artifacts: Concept and Case Study.}, Author = {Steinegger, M. and Zoitl, A.}, Booktitle = {Proceedings of the 17th IEEE International Conference on Emerging Technologies and Factory Automation}, Year = {2012}, Pages = {1-8}, Doi = {10.1109/ETFA.2012.6489546} }
Funding
01.01.2013 Automated in-line metrology for nanopositioning systems (aim4np)
Project focus
- Mechanical design and analysis of a 6-DoF precision positioning system
- System modeling, control loop design and implementation
- Prototype design, system integration and testing
Description
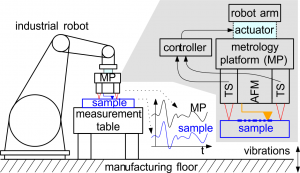
Vibration isolation concept for in-line nanometrology
Robot based in-process metrology is a key enabling technology for upcoming production systems and is considered as one of the most important preconditions for future production. Measuring properties at the nanometer scale such as topography, morphology and roughness within a production line becomes increasingly important for quality control and process monitoring tasks to make high tech production more efficient. Atomic Force Microscopes [AFM] and related scanning probe microscopes are commonly used to investigate the samples under test in great detail and with the required accuracy and spatial resolution. Such metrology tools are usually applied in a vibration-free scientific environment which is completely contrary to a production environment. Production facilities are populated with machines and working personal that introduce environmental vibrations typically exceeding the structure size of the sample. Comparable instruments that are compatible with production environments do not exist but are an absolute necessity to make the step into the next production era.
Within the scope of this project, a novel approach is developed for robot-based in-line metrology to isolate nanoscale measurements from environmental vibrations. Instead of isolating sample and robot from floor vibrations by means of passive or active vibration isolation aids, the distance between sample and metrology tool is kept constant. This is realized by a metrology platform, which will be brought in close proximity to the sample by an industrial robot. It is equipped with high precision position sensors, which measure the distance between sample and metrology platform. A six degree of freedom actuator creates the force for tracking the sample. Tracking of the sample is facilitated by a high bandwidth feedback control, hence forming a vibration-free environment for the nanoscale measurement directly in the production line.
Mechatronic Design and System Integration
On-site vibrations measurements are conducted to derive system requirements, and to specify requirements on the component level. A holistic design approach is applied that considers control relevant requirements already in the mechanical and electronic design steps to achieve a high performance of the mechatronic system. For example, such requirements concern the need for compactness and high stiffness of the inspection tools as they are actively moved by the platform, which is in conflict with their usage in vibration-free environments.
This results in a compact six degrees of freedom Lorentz actuator (zero stiffness actuation) with a gravity compensator powered by high bandwidth current controlled amplifiers, and a balanced design to minimize actuation power. By using finite element analysis tools, the structural stiffness of the platform is analysed with the aim to enable high bandwidth position control.
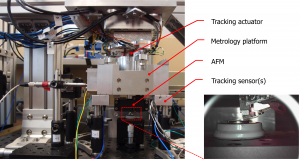
Experimental metrology platform setup with on-board AFM
Scientific Imaging and Metrology Systems
An AFM head with a self-sensing cantilever is installed and used as inspection tool. Imaging of test gratings, plastic injection samples and nanowires could be successfully demonstrated.
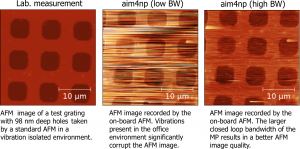
AFM imaging in a noisy environment
Precision Motion Control
Modelbased control techniques are applied to incorporate higher order plant dynamics such as caused by structural resonances of the mechanical structure. A system model is built to decouple the MIMO plant, resulting in the implementation of SISO controllers for each degree of freedom. Switching control techniques are researched to operate the metrology platform in two different modes, which are the control with sensors mounted in the actuator and the control with the tracking sensor. Further new approaches are developed to allow high bandwidth control of a body with high resonance frequencies that is mechanically coupled to a body exhibiting low resonance frequencies.
Videos
Applications
- In-line metrology
- Nanopositioning systems
Related publications
- J. Fraxedas, U. Staufer, R. Munnig Schmidt, J. W. Spronck, E. R. Trinidad, R. Deng, G. Schitter, M. Thier, S. Messineo, S. Ito, R. Hainisch, R. Saathof, F. Perez-Murano, A. Verdaguer, A. Blümel, E. J. W. List-Kratochvil, R. Koops, M. van Veghel, R. Sum, A. Lieb, W. Schott, D. Dontsov, T. Sulzbach, W. Engl, C. Penzkofer, C. Colominas, K. Fluch, A. Garcia-Granada, J. Puigoriol-Forcada Josep MariaFraxedas, U. Staufer, R. Munnig Schmidt, J. W. Spronck, E. R. Trinidad, R. Deng, G. Schitter, M. Thier, S. Messineo, S. Ito, R. Hainisch, R. Saathof, F. Perez-Murano, A. Verdaguer, A. Blümel, E. J. W. List-Kratochvil, R. Koops, M. van Veghel, R. Sum, A. Lieb, W. Schott, D. Dontsov, T. Sulzbach, W. Engl, C. Penzkofer, C. Colominas, K. Fluch, A. Garcia-Granada, and J. M. Puigoriol-Forcada, Automated inline Metrology for Nanoscale Production – aim4np, in 3rd International Conference on Industrial Technologies Research and Innovation, 2014.
[BibTex]@Conference{TUW-236535, Title = {Automated inline Metrology for Nanoscale Production - aim4np}, Author = {Fraxedas, Jordi and Staufer, Urs and Munnig Schmidt, Robert and Spronck, Jo W. and Trinidad, Enrique Rull and Deng, Ruijun and Schitter, Georg and Thier, Markus and Messineo, Saverio and Ito, Shingo and Hainisch, Reinhard and Saathof, Rudolf and Perez-Murano, Francesc and Verdaguer, Albert and Bl{\"u}mel, Alexander and List-Kratochvil, Emil J. W. and Koops, Richard and van Veghel, Marijn and Sum, Robert and Lieb, Andreas and Schott, Walter and Dontsov, Denys and Sulzbach, Thomas and Engl, Wolfgang and Penzkofer, Christian and Colominas, Carles and Fluch, Karl and Garcia-Granada, Andr{\'e}s-Amador and Puigoriol-Forcada, Josep MariaFraxedas, Jordi and Staufer, Urs and Munnig Schmidt, Robert and Spronck, Jo W. and Trinidad, Enrique Rull and Deng, Ruijun and Schitter, Georg and Thier, Markus and Messineo, Saverio and Ito, Shingo and Hainisch, Reinhard and Saathof, Rudolf and Perez-Murano, Francesc and Verdaguer, Albert and Bl{\"u}mel, Alexander and List-Kratochvil, Emil J. W. and Koops, Richard and van Veghel, Marijn and Sum, Robert and Lieb, Andreas and Schott, Walter and Dontsov, Denys and Sulzbach, Thomas and Engl, Wolfgang and Penzkofer, Christian and Colominas, Carles and Fluch, Karl and Garcia-Granada, Andr{\'e}s-Amador and Puigoriol-Forcada, Josep Maria}, Booktitle = {3rd International Conference on Industrial Technologies Research and Innovation}, Year = {2014}, Doi = {10.13140/2.1.3459.3607} }
- M. Thier, R. Saathof, A. Sinn, R. Hainisch, and G. Schitter, Six Degree of Freedom Vibration Isolation Platform for In-Line Nano-Metrology, in Proceedings of the 7th IFAC Symposium on Mechatronic Systems, 2016, p. 149–156.
[BibTex]@InProceedings{TUW-251134, Title = {Six Degree of Freedom Vibration Isolation Platform for In-Line Nano-Metrology}, Author = {Thier, Markus and Saathof, Rudolf and Sinn, Andreas and Hainisch, Reinhard and Schitter, Georg}, Booktitle = {Proceedings of the 7th IFAC Symposium on Mechatronic Systems}, Year = {2016}, Note = {Vortrag: 7th IFAC Symposium on Mechatronic Systems {\&} 15th Mechatronics Forum International Conference, Loughborough (Vereinigte K{\"o}nigreich); 2016-09-05 -- 2016-09-08}, Pages = {149--156}, Doi = {10.1016/j.ifacol.2016.10.534}, Keywords = {Vibration isolation, Systems design, Nano-metrology, Precision positioning systems.} }
- E. Csencsics, M. Thier, P. Siegl, and G. Schitter, Mechatronic Design of an Active Two-body Vibration Isolation System, in Proceedings of the 7th IFAC Symposium on Mechatronic Systems, 2016, p. 133–140.
[BibTex] [Download]@InProceedings{TUW-251120, author = {Csencsics, Ernst and Thier, Markus and Siegl, Philipp and Schitter, Georg}, title = {Mechatronic Design of an Active Two-body Vibration Isolation System}, booktitle = {Proceedings of the 7th IFAC Symposium on Mechatronic Systems}, year = {2016}, pages = {133--140}, note = {Vortrag: 7th IFAC Symposium on Mechatronic Systems {\&} 15th Mechatronics Forum International Conference, Loughborough (Vereinigte K{\"o}nigreich); 2016-09-05 -- 2016-09-08}, doi = {10.1016/j.ifacol.2016.10.532}, keywords = {Vibration isolation, Systems design, Mechanical decoupling, PID controllers, Reduced energy consumption} }
- F. Cigarini, E. Csencsics, R. Saathof, and G. Schitter, Design of Tuneable Damping for Precision Positioning of a Two-Body System, in Proceedings of the 7th IFAC Symposium on Mechatronic Systems, 2016, p. 222–227.
[BibTex] [Download]@InProceedings{TUW-251116, author = {Cigarini, Francesco and Csencsics, Ernst and Saathof, Rudolf and Schitter, Georg}, title = {Design of Tuneable Damping for Precision Positioning of a Two-Body System}, booktitle = {Proceedings of the 7th IFAC Symposium on Mechatronic Systems}, year = {2016}, pages = {222--227}, note = {Posterpr{\"a}sentation: 7th IFAC Symposium on Mechatronic Systems {\&} 15th Mechatronics Forum International Conference, Loughborough (Vereinigte K{\"o}nigreich); 2016-09-05 -- 2016-09-08}, doi = {10.1016/j.ifacol.2016.10.554}, keywords = {Two-body systems, precision positioning, damping} }
- M. Thier, R. Saathof, E. Csencsics, R. Hainisch, A. Sinn, and G. Schitter, Entwurf und Regelung eines Positioniersystems für robotergestützte Nanomesstechnik, at – Automatisierungstechnik, vol. 63, p. 727–738, 2015.
[BibTex] [Download]@Article{TUW-242211, author = {Thier, Markus and Saathof, Rudolf and Csencsics, Ernst and Hainisch, Reinhard and Sinn, Andreas and Schitter, Georg}, title = {Entwurf und Regelung eines Positioniersystems f{\"u}r robotergest{\"u}tzte Nanomesstechnik}, journal = {at - Automatisierungstechnik}, year = {2015}, volume = {63}, pages = {727--738}, doi = {10.1515/auto-2015-0044}, keywords = {In-Prozess-Messtechnik, Pr{\"a}zisionspositionierung, Pr{\"a}zisionsmesstechnik, Instrumentierung.}, }
- R. Saathof, M. Thier, R. Heinisch, and G. Schitter, Integrated system and control design of a one DoF nano-metrology platform, Mechatronics, vol. 47, pp. 88-96, 2017.
[BibTex]@Article{TUW-20170925, Title = {Integrated system and control design of a one DoF nano-metrology platform}, Author = {Saathof, R. and Thier, M. and Heinisch, R. and Schitter, G.}, Journal = {Mechatronics}, Year = {2017}, Pages = {88-96}, Volume = {47}, Doi = {10.1016/j.mechatronics.2017.08.013} }
Project partners
- Project leader: TU Delft (Prof. Urs Staufer, Dep. Precision and Microsystems Engineering)
- CIN2 & CNM, CSICS
- Flubetech S.L.
- IQS
- Joanneum Research
- Nanosurf AG
- Nanotools GmbH
- Nanoworld
- SIOS Meßtechnik GmbH
- VSL