Modellierung und hochgenaue Regelung eines Permanentmagnet-Linearsynchronmotors
Projektfokus
- Modellierung von Permanentmagnet-Linearsynchronmotoren bestehend aus gekrümmten Segmenten
- Energieeffiziente, hochpräzise Positionsregelung
- Hochgenauer Betrieb mehrerer Shuttles in geringem Abstand
Beschreibung
Permanentmagnet-Linearsynchronmotoren (PMLSMs) sind Schlüsseltechnologien in der modernen Industrieautomation – insbesondere in Transport- und Fertigungssystemen, die höchste Anforderungen an Dynamik, Präzision und Flexibilität stellen. Ihr besonderes Design ermöglicht den simultanen Betrieb mehrerer beweglicher Einheiten – sogenannter Shuttles oder Movers – auf einem gemeinsamen Motor. Dadurch wird eine unabhängige, hochdynamische Bewegungssteuerung realisierbar. Zudem erlaubt der modulare Aufbau mit segmentierten Statoren die Umsetzung komplexer Geometrien, beispielsweise durch die Kombination gerader und gekrümmter Segmente. Dies eröffnet neue Gestaltungsmöglichkeiten für innovative Fertigungs- und Transportsysteme.
Für die effiziente Regelung von PMLSMs ist ein genaues mathematisches Modell entscheidend. In diesem Projekt wurde ein Reluktanzmodell (MEC) entwickelt, das auch beliebig gekrümmte Motorgeometrien abbilden kann. Es vereint hohe Genauigkeit mit effizienter Berechenbarkeit. Zur weiteren Verbesserung der Modellgenauigkeit kommt ein Kalibrierungsverfahren zum Einsatz, das auf Messdaten eines eigens entwickelten Prüfstands basiert (siehe Abb. 1).
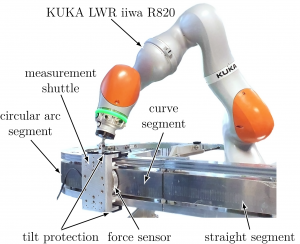
Prüfstand zur Modellkalibrierung.
Auf Basis des entwickelten Modells werden optimierte Strommuster berechnet, die gezielt die gewünschte Vortriebskraft auf die Shuttles erzeugen. Diese modellbasierte Stromoptimierung nutzt gezielt die Freiheitsgrade des Systems zur Minimierung ohmscher Verluste und ermöglicht so einen energieeffizienten Betrieb. Die Bewegungssteuerung erfolgt über einen überlagerten Positionsregler mit zwei Freiheitsgraden. Um die Regelgüte – insbesondere an Segmentübergängen – weiter zu steigern, wird eine iterativ lernende Regelung (ILC) ergänzt. Dadurch lassen sich auch Einflüsse durch Fertigungs- oder Montageabweichungen wirkungsvoll kompensieren.
Beim gleichzeitigen Betrieb mehrerer Shuttles in geringem Abstand treten zusätzliche Herausforderungen auf – etwa überlappende Strommuster oder magnetische Wechselwirkungen zwischen benachbarten Permanentmagneten. Im Rahmen des Projekts wurde eine hochpräzise Positionsregelung entwickelt, die auch bei variablen oder minimalen Shuttleabständen zuverlässige Ergebnisse liefert.
Die entwickelten Modelle und Regelstrategien wurden erfolgreich an einem Prüfstand validiert und zeigen exzellente Ergebnisse. Ein Video, das ausgewählte Ergebnisse zeigt, ist unten beigefügt. Weitere technische Details sind den referenzierten Publikationen zu entnehmen.
Video
Ausgewählte Publikationen
- G. Fuchs, A. Kugi, and W. Kemmetmüller, Magnetic equivalent circuit modeling of a permanent magnet linear synchronous motor composed of curved segments, Mechatronics, vol. 104, p. 103256, 2024.
[BibTex]@Article{Fuchs2024, author = {Fuchs, G. and Kugi, A. and Kemmetm\"uller, W.}, journaltitle = {Mechatronics}, title = {Magnetic equivalent circuit modeling of a permanent magnet linear synchronous motor composed of curved segments}, doi = {10.1016/j.mechatronics.2024.103256}, issn = {0957-4158}, pages = {103256}, volume = {104}, journal = {Mechatronics}, year = {2024}, } - G. Fuchs, A. Deutschmann-Olek, A. Kugi, and W. Kemmetmüller, Iterative learning-based online calibration of a position sensor system for permanent magnet linear synchronous motors, in Proceedings of the IECON 2024 – 50th Annual Conference of the IEEE Industrial Electronics Society, Chicago, USA, 2024, p. 1–8.
[BibTex]@InProceedings{Fuchs2024a, author = {Fuchs, G. and Deutschmann-Olek, A. and Kugi, A. and Kemmetm\"uller, W.}, booktitle = {Proceedings of the IECON 2024 - 50th Annual Conference of the IEEE Industrial Electronics Society}, title = {Iterative learning-based online calibration of a position sensor system for permanent magnet linear synchronous motors}, doi = {10.1109/IECON55916.2024.10905609}, pages = {1--8}, publisher = {IEEE}, address = {Chicago, USA}, year = {2024}, } - G. Fuchs, A. Deutschmann-Olek, A. Kugi, and W. Kemmetmüller, High-precision tracking control of a segmented stator permanent magnet linear synchronous motor, IEEE Transactions on Power Electronics, p. 1–12, 2025.
[BibTex]@Article{Fuchs2025, author = {Fuchs, G. and Deutschmann-Olek, A. and Kugi, A. and Kemmetm\"uller, W.}, date = {2025}, title = {High-precision tracking control of a segmented stator permanent magnet linear synchronous motor}, doi = {10.1109/TPEL.2025.3579258}, issn = {1941-0107}, pages = {1--12}, journal = {IEEE Transactions on Power Electronics}, publisher = {Institute of Electrical and Electronics Engineers (IEEE)}, year = {2025}, }
Projektpartner
Ansprechpartner
Dipl.-Ing. BSc. Gerd FuchsUniv.Prof. Dr.-Ing. Wolfgang Kemmetmüller