Pfad- und Trajektorienplanung
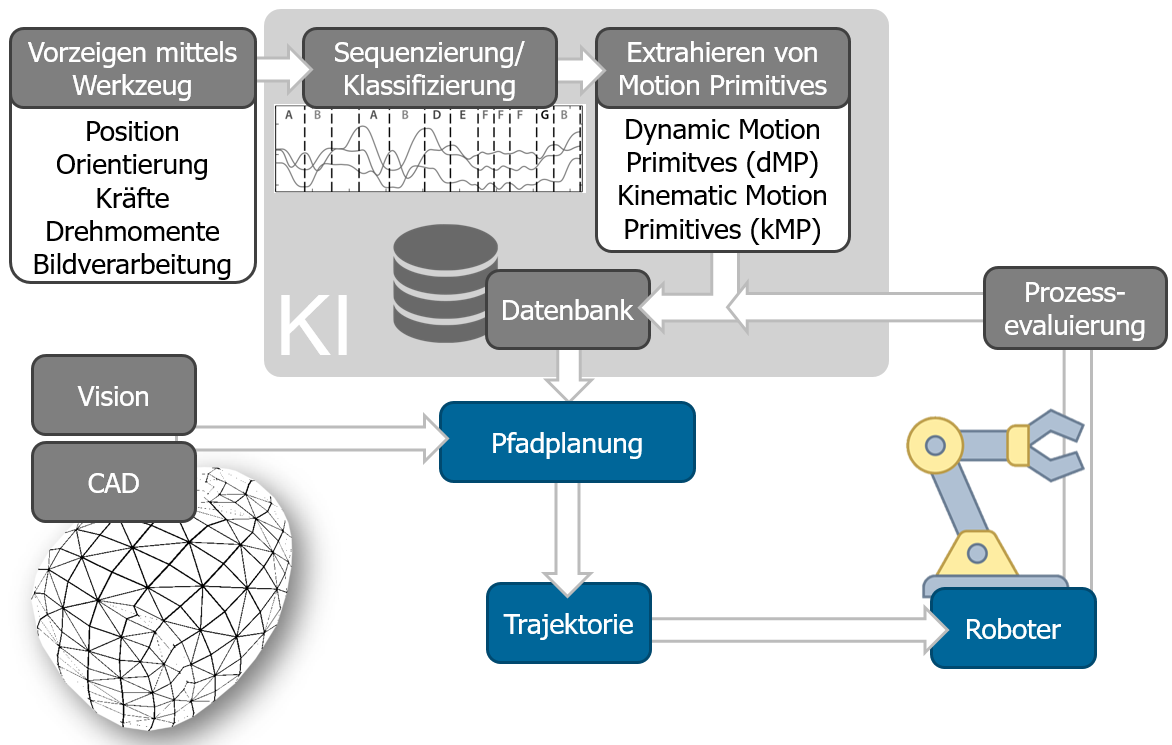
Der Fokus dieser Forschungsarbeit liegt auf der automatisierten und schnellen Trajektorienplanung unter Ausnutzung der Eigenschaften des industriellen Prozesses. Die Trajektorienplanung für industrielle Roboter ist die Schnittstelle zwischen den gewünschten Bewegungen des Roboters und der tatsächlichen Ausführung am Roboter. Für die Prozessausführung werden durch die Prozessdatenbank bzw. die Prozessevaluierung gewünschte Endeffektorbewegungen im Raum berechnet und vorgegeben. Diese Endeffektorbewegungen werden mit Hilfe der Trajektorienplanung in Roboterbewegungen umgerechnet. Die Roboterbewegungen werden dann als gewünschte Trajektorien im Achsraum des Roboters durch einen geeigneten Regler am Roboter ausgeführt.
Path and trajectory planning in the Festo System Laboratory for Autonomous Handling Systems.
Bei der Trajektorienplanung müssen kinematische und dynamische Beschränkungen des Roboters selbst sowie auch des Prozesses in Betracht gezogen werden. So ist es nicht möglich, eine beliebige Endeffektorbewegung im Raum vorzugeben, da diese zum Beispiel den Arbeitsbereich des Roboters verlassen könnte. Vor allem für kontinuierliche Endeffektorbewegungen des Roboters müssen Einschränkungen berücksichtigt werden, wie z.B. die mechanischen Bewegungsbereiche der Achsen, der begrenzte Arbeitsraum des Roboters und die Anzahl an Freiheitsgraden des Roboters. Weiters müssen Kollisionen mit der Umgebung oder mit dem Roboter selbst vermieden werden, weshalb diese ebenfalls bereits in der Bewegungsplanung des Roboters berücksichtigt werden. Durch diese Einschränkungen ist es jedoch nicht immer möglich, kontinuierliche Achstrajektorien für die gewünschten Bewegungen zu berechnen. Werden jedoch Eigenschaften des Prozesses selbst bzw. erlaubte Prozesstoleranzen berücksichtigt, kann die Berechnung von komplexen kontinuierlichen Endeffektorpfaden im Achsraum des Roboters ermöglicht werden.