Prozessdemonstration, Maschinelles Lernen und Prozessdatenbank
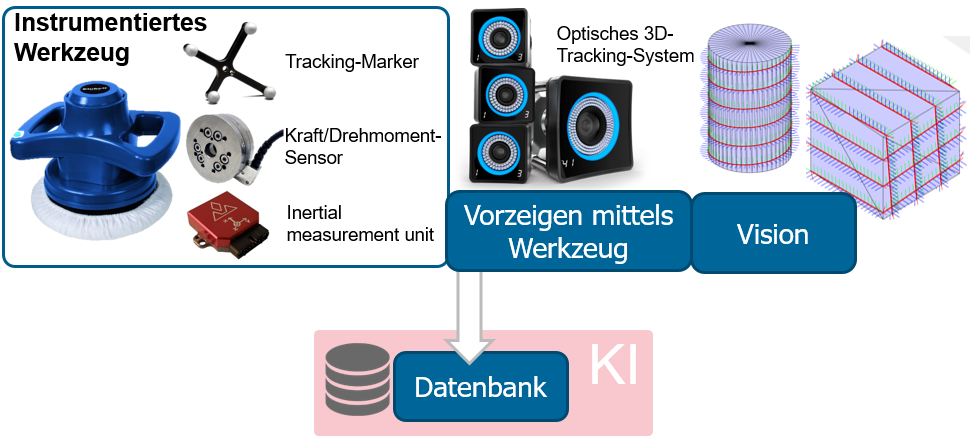
Zentrales Element des Festo Systemlabors ist die Verarbeitung der Prozesssignale mithilfe von maschinellem Lernen, siehe Abb. 1. Wird ein neuer Prozess vorgezeigt, so werden im Rahmen der Prozessdemonstration eine ganze Reihe von Signalen mithilfe von sogenannten instrumentierten Werkzeugen aufgezeichnet. Die entstandenen Signale, sowie auch die Geometrie des bearbeiteten Objektes werden mittels maschinellem Lernen verarbeitet und in einer Prozessdatenbank abgelegt. Diese Prozessdatenbank ist die Grundlage für die Prozessausführung auf neuen, bisher unbekannten Objekten.
Prozessdemonstration, Maschinelles Lernen und Prozessdatenbank.
Prozessdemonstration
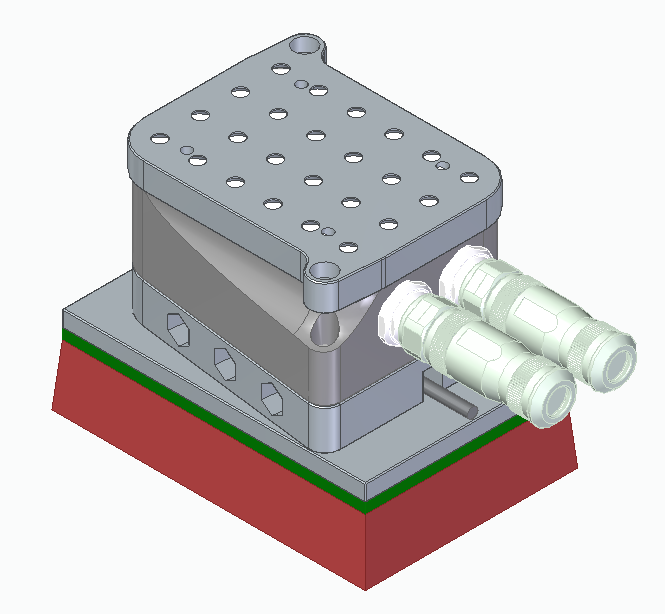
Die Prozessdemonstration und Aufzeichnung der Prozesssignale erfolgt über instrumentierte Werkzeuge. Dabei handelt es sich um Werzeuge, die durch minimale Modifikation mit zusätzlichen Sensoren ausgestattet wurden, um alle relevanten Prozesssignale aufzeichnen zu können, siehe Abb. 2 und 3. Beispiele für eingesetzte Sensoren sind Kraft-/Drehmomentsensoren, Inertialmesssensoren sowie reflektierende Marker für die optische Positions- und Orientierungsmessung. Der Einsatz von instrumentierten Werkzeugen erlaubt es, auf einfache Weise die tatsächlichen Vorgänge bei der Demonstration aufzuzeichnen, ohne die gesamte menschliche Bewegung bei der Demonstration interpretieren zu müssen. Gleichzeitig kann ein ähnliches Werkzeug am Endeffektor des Roboters eingesetzt werden, um den demonstrierten Prozess in neuen Situationen auszuführen.
 Instrumentiertes Werkzeug für einen Paketierprozess. |
 Instrumentiertes Werkzeug für einen Polier- oder Reinigungsprozess. |
Maschinelles Lernen und Prozessdatenbank
Mithilfe von Sensorfusion werden die aufgezeichneten Prozesssignale aus der Demonstration zusammengeführt, geometrisch zum digitalen Werkstück ausgerichtet und daraus die tatsächliche Bewegung des instrumentierten Werzeugs berechnet. Weiters werden die angewendeten Kontaktkräfte im Kontaktpunkt zwischen Werkstück und Werkzeug berechnet. Die Visualisierung einer solchen Demonstration zeigt Abb. 4.
Diese aufbereiteten Daten werden in geeignete Abschnitte zerlegt und in Bezug auf die darunterliegende Werkstückgeometrie gesetzt, worauf ein Bearbeitungspfad auf der Oberfläche berechnet wird. Mithilfe von probabilistischen Methoden des maschinellen Lernens werden im nächsten Schritt die bei der Demonstration angewendeten Prozessparameter gelernt und in einer Prozessdatenbank abgelegt. Diese Prozessdatenbank ist die Grundlage für das Generieren von Werkzeugbewegungen auf neuen Objekten mit ähnlicher Geometrie.
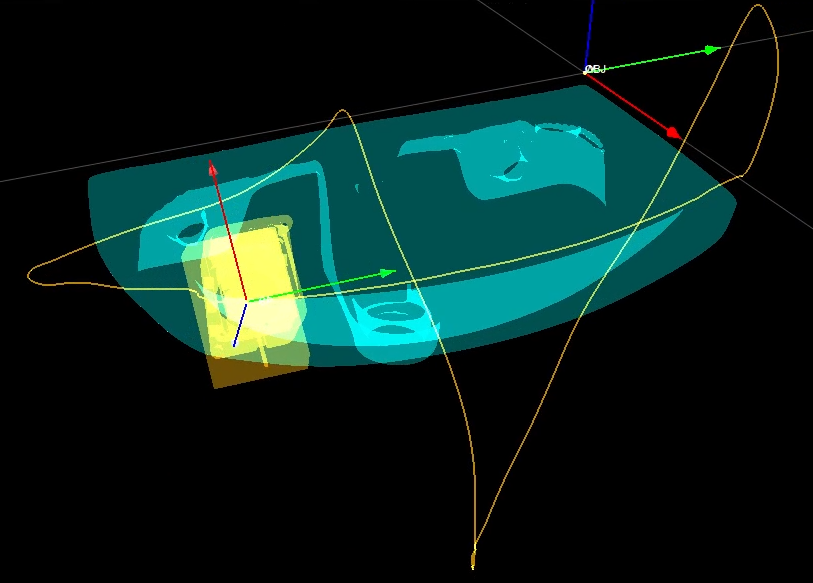
Visualisierung einer Demonstration mithilfe des instrumentierten Werkzeuges.