Process evaluation
In process evaluation, the surface of an object is inspected for visual defects using optical sensors. Detected defects provide conclusions about the quality of the executed process. The evaluation assesses the learned process properties and helps to improve the process database iteratively.
For the process evaluation, an inspection plan is created based on the reconstructed 3D model of the object and the path of the previously performed industrial process, see Fig. 1. The requirement is to inspect the entire surface that has been processed by the robotic system. To execute the plan, the positioning of a camera is refined using a direct visual servoing approach. This compensates for absolute positioning inaccuracies of the robot system.
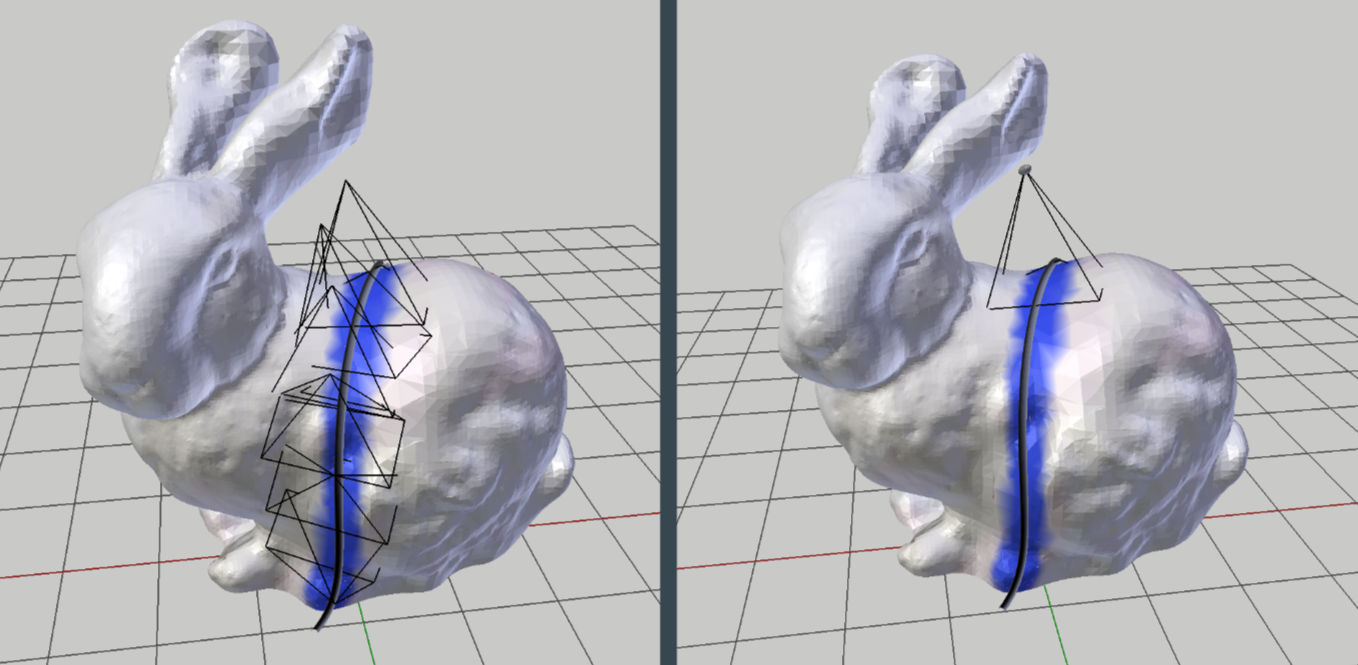
Generation of the inspection plan and computation of the camera pose.
Using the collected inspection data, defects on the surface of the object are detected and subsequently projected onto the 3D model. The positions of the defects allow to draw conclusions about the quality of the process execution, see Fig. 2. This allows the process to be monitored automatically and further executions of the industrial process to be improved.
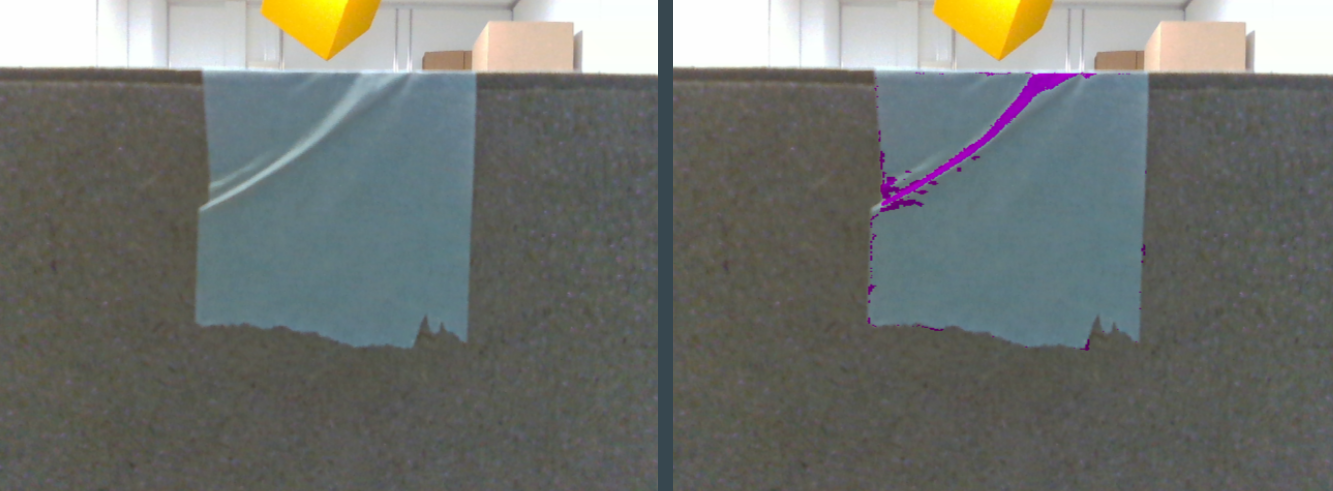
Detection of defects.