Industrial Robotics
In the research field Industrial Robotics, research is conducted on many topics related to industrial robotic systems as well as physical human-robot interaction. The considered systems range from classical industrial robots and collaborative robots to mobile robots and flying drones. Solutions are developed for a variety of different problems, ranging from novel programming and interaction concepts to algorithms for complex trajectory planning in highly redundant systems.
Research Topics
 |
 |
 |
|
Industrial robotic systems |
Physical human-robot interaction |
Autonomus (re-)fabrication |
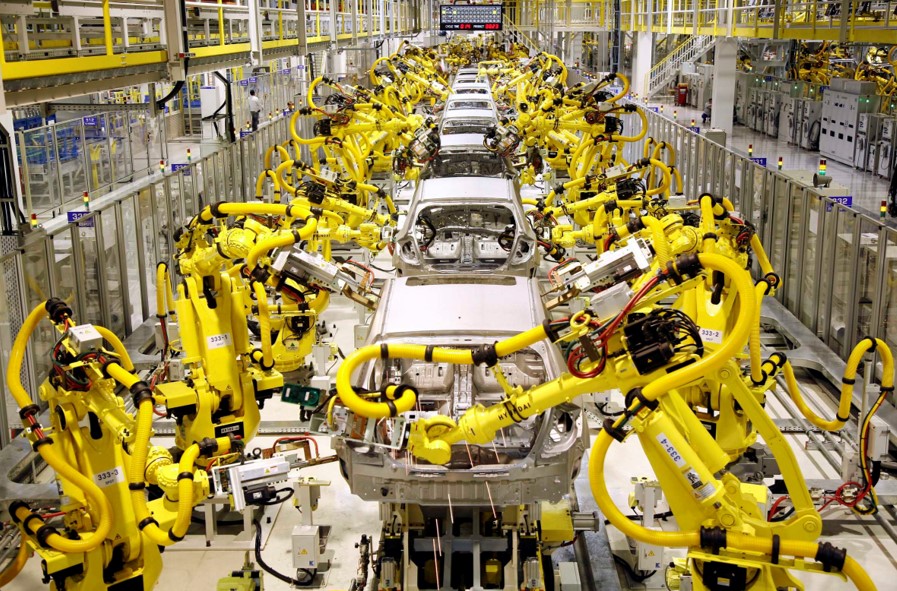
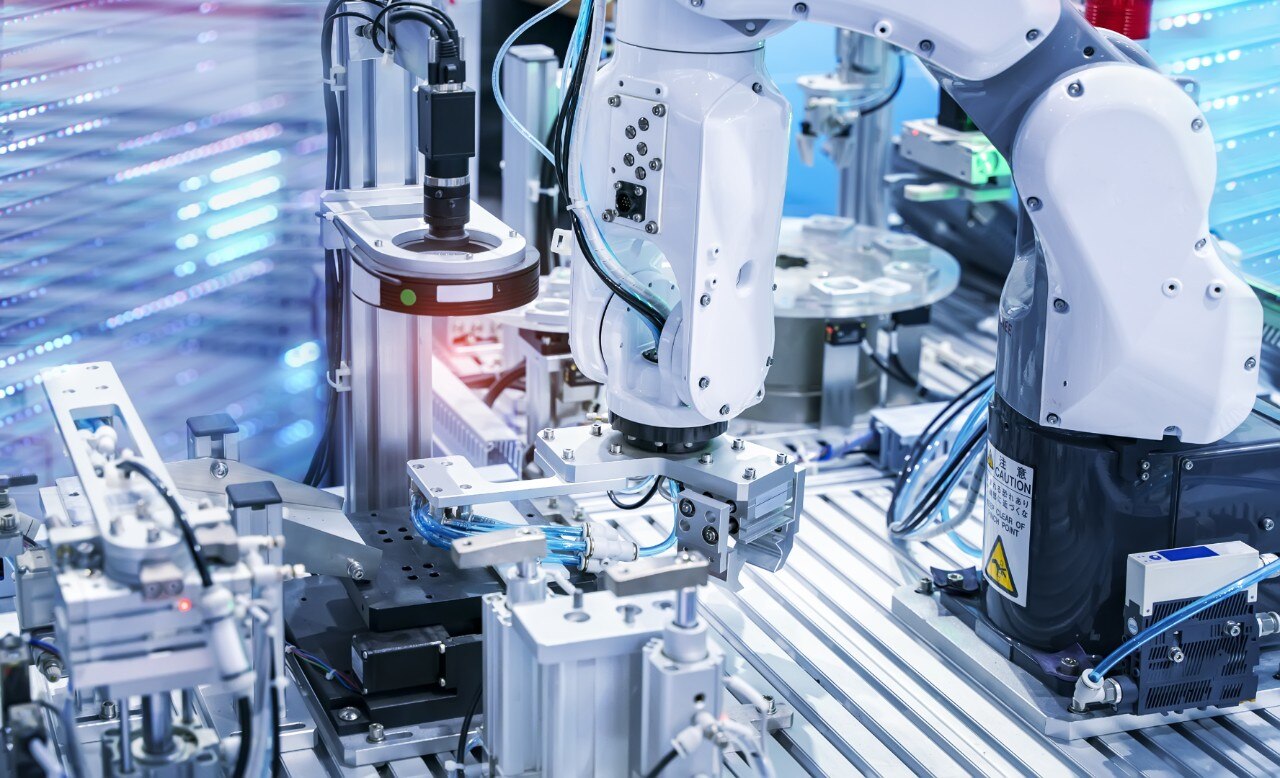
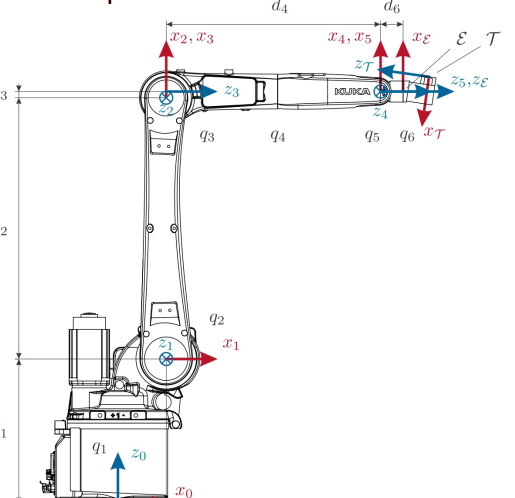
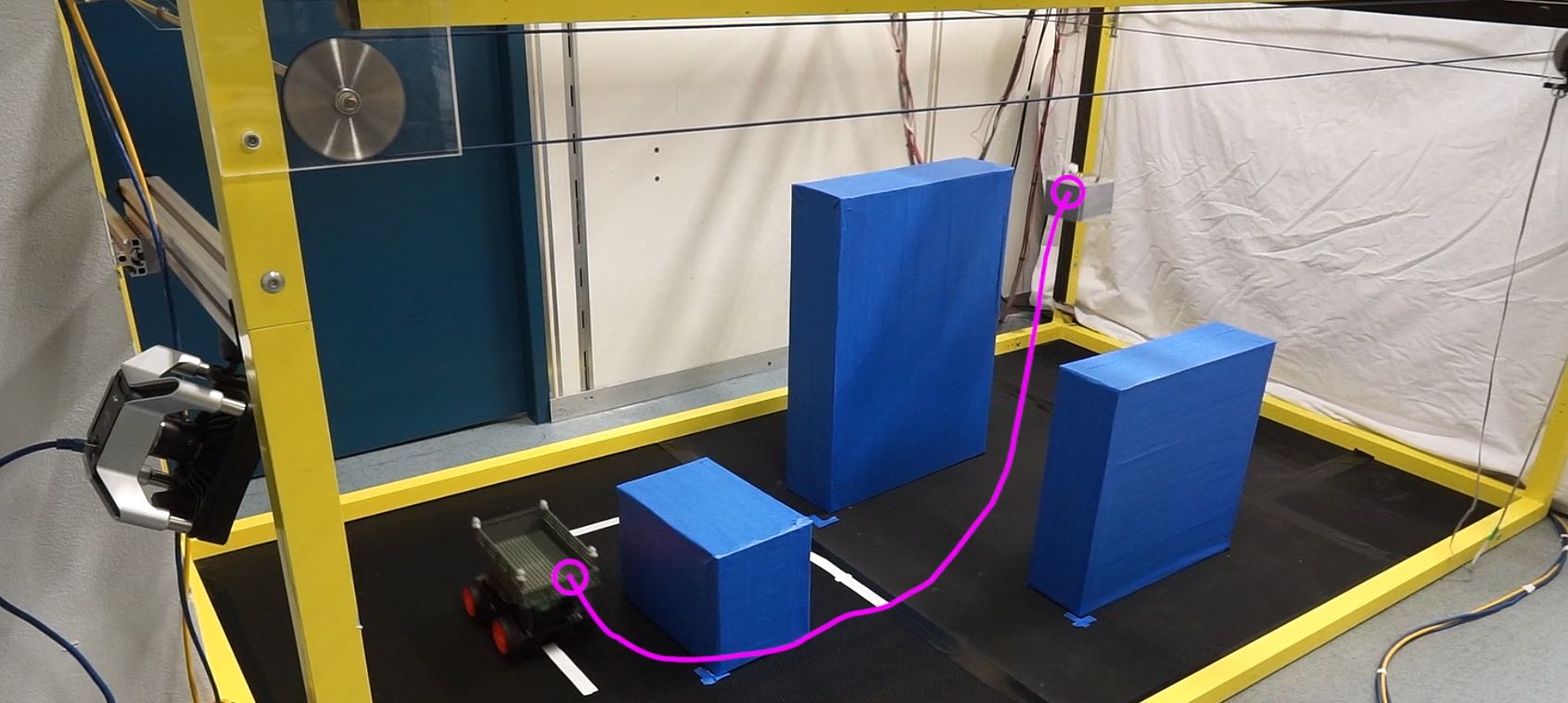
The research topic of industrial robotic systems includes classical industrial robots, collaborative robots, cable-driven robots, linear actuators, gantry systems, mobile robots, aerial drones and also ranges to large-scale manipulators such as construction machines and truck-mounted concrete pumps. The work with these systems starts with rigorous mathematical modeling, taking into account advanced kinematic and dynamic effects. Based on this, simulation and visualization models are designed, and advanced path and trajectory panning concepts as well as control concepts are explored.
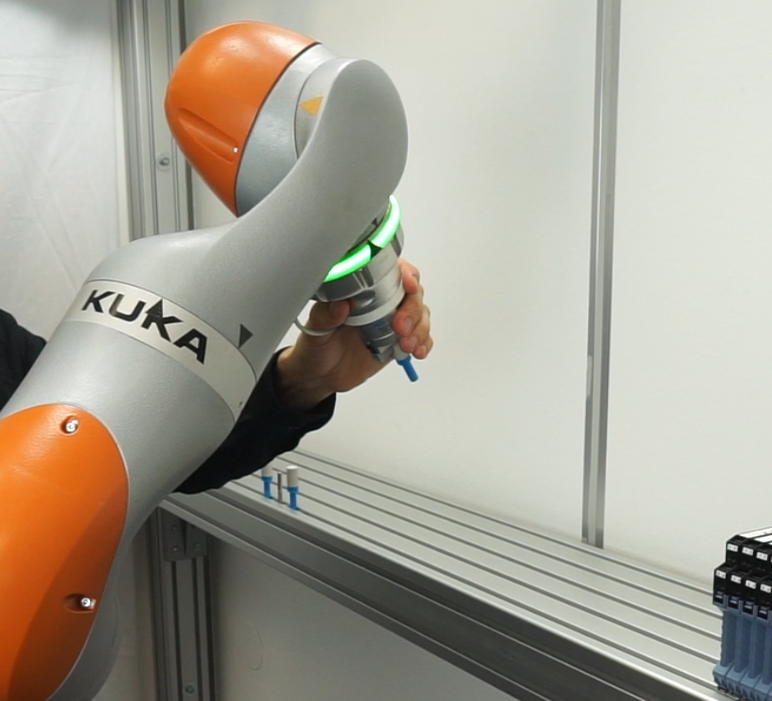
In physical human-robot interaction, collaborative robots, modular robots as well as classical industrial robots and in combination with linear axes are used. Equipped with a variety of sensors, these robot systems can physically interact with humans, eliminating the need for a safety fence even for classical industrial robots. Based on advanced control concepts, such as path-following control, novel operating and programming concepts can be explored. Furthermore, the focus is on reactive online path planners, which are designed for fast replanning, collision avoidance and avoidance of kinematic singularities.
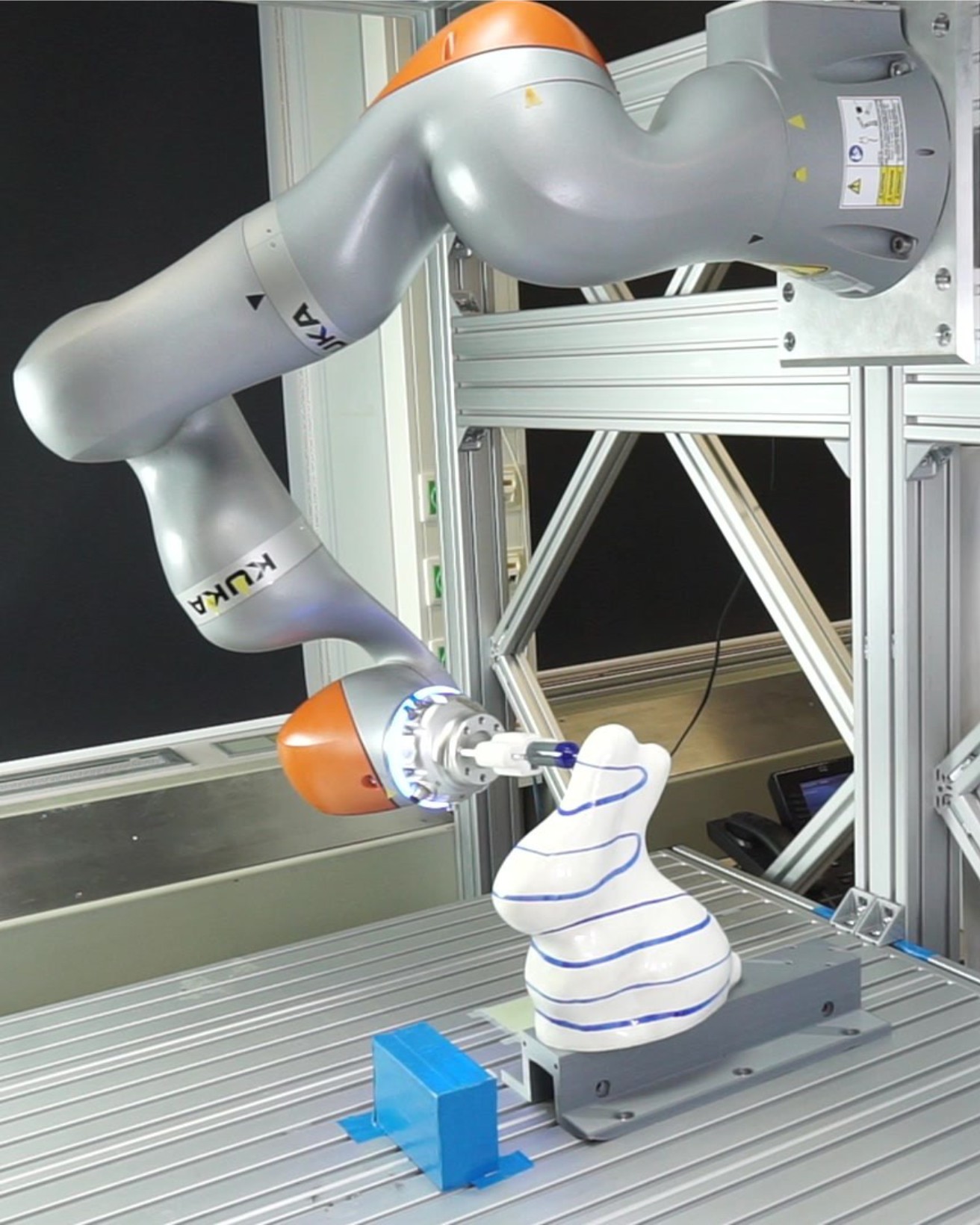
In the research topic of autonomous (re-)fabrication, highly flexible robotic work cells are being researched that can autonomously execute industrial processes on three-dimensional free-form surfaces. Both production processes and remanufacturing processes are considered. The process to be executed is first demonstrated by humans with the help of so-called instrumented tools and the necessary process parameters are learned from these demonstrations. Consequently, the robotic system can acquire and digitally reconstruct new workpieces, plan the desired process on this workpiece and execute the process with the appropriate interaction forces. A subsequent evaluation process allows to further adapt and improve the learned process parameters. This topic of research is significantly driven by the Festo System Lab for Autonomous Handling Systems.
Research Methods
 |
 |
 |
| Mathematical modeling of advanced kinematic and dynamic effects | Reactive path planning | Complex path and trajectory planning |
 |
 |
 |
| Advanced control concepts | Novel interaction and programming concepts | Vision-based control concepts |
 |
 |
 |
| Machine learning | Processing of 3D freeform surfaces | Absolute and path accuracy |