Robots
Robots with serial kinematics
 |
3 x KUKA LBR iiwa 14 R820
The KUKA LBR iiwa is a collaborative industrial robot designed for human-machine interaction. It is a kinematically redundant robot with 7 degrees of freedom, as well as torque sensors and high-precision encoders in each axis. The robot is particularly suitable for the development of novel control concepts as well as concepts for human-machine interaction due to the communication interface with a sampling time of 8 kHz. |
 |
2 x KUKA LBR IV+
The KUKA LBR IV+ collaborative industrial robot is the predecessor of the KUKA LBR iiwa and is also designed for human-machine interaction. The robot is controlled via the Fast Research Interface (FRI) with a sampling rate of 1 kHz and is suitable for simple positioning tasks and as a robot for secondary tasks. |
 |
COMAU Racer
The COMAU Racer can be regarded as a “classic” industrial robot with 6 degrees of freedom. With a payload of up to 7 kg, the robot is suitable for highly dynamic trajectories. The robot is used for the development of new control concepts in the field of iterative learning control (ILC), as well as for the investigation of absolute and trajectory accuracy of robotic systems. |
 |
2 x SCHUNK SDH-2
The Schunk SDH-2 is a 3-finger gripper with a total of seven degrees of freedom: Two per finger and one degree of freedom to rotate the fingers. In addition, each finger has two highly sensitive 2D tactile sensors. An interface for control with low sampling time was developed at the institute. |
Robots with parallel kinematics
 |
FESTO Tripod
Highly dynamic robot with parallel kinematics and 4 degrees of freedom (3 translational degrees of freedom and one rotational unit). The construction with carbon rods provides high stiffness and high positioning accuracy. For the interaction with the environment, the end-effector is equipped with a highly sensitive 3-axis force sensor. |
 |
Dart-Roboter
Innovative cable-driven robot with redundant parallel kinematics and six drive motors, which was conceptualized, developed and built at the institute. In a planar workspace, this robot can position and simultaneously rotate a touring dartboard with high dynamics. During the approach of a dart, this robot can position the dartboard in such a way that a desired, predefined field on this board is hit – only a short period of time of about 200 ms is available for this. |
Mobile Robots
 |
DS AUTOMATION Smart Shuttle „Sally”
Autonomous mobile platform with laser scanner for scanning the environment and initiating emergency stops. A compact mounting frame is built on top of the mobile platform, which enables the mounting of a KUKA LBR iiwa 14 R820. A compact Beckhoff industrial PC is used to control the robot. In this combination, the smart shuttle becomes a mobile gripper platform. |
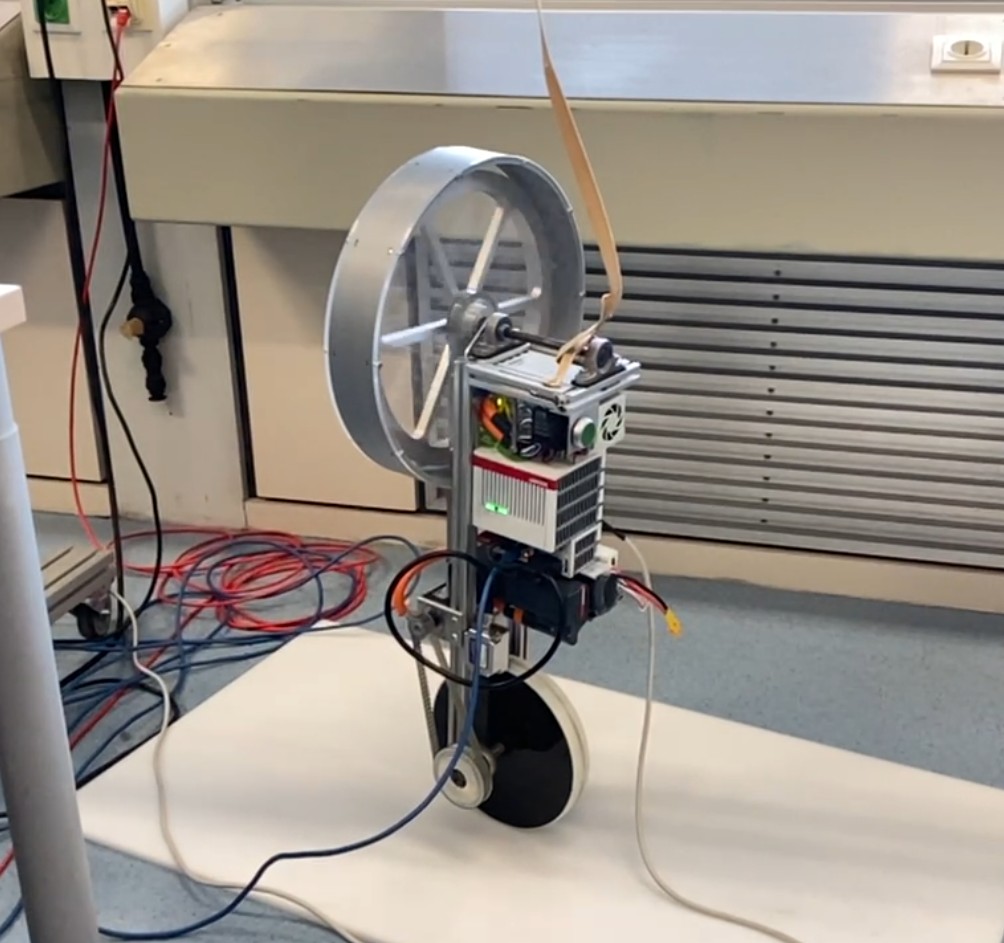 |
Single-Wheel-Robot
The Single-Wheel-Robot is a robot balancing on a single wheel, which was developed and built at the institute. The robot is controlled by a Beckhoff industrial PC and is expandable with many sensors and interfaces. |
Drones
 |
INTEL Aero Drone Platform
Commercial drone platform with built-in sensors, actuators and lots of on-board computing power. |
 |
Hexacopter
The Hexacopter is a commercial flying drone, which was disassembled into its individual parts at the institute and rebuilt in terms of propulsion technology, computing unit and control technology. |