Roboter
Roboter mit serieller Kinematik
 |
3 x KUKA LBR iiwa 14 R820
Der KUKA LBR iiwa ist ein kollaborativer Industrieroboter, welcher für die Mensch-Maschine-Interaktion konzipiert ist. Dabei handelt es sich um einen kinematisch redundanter Roboter mit 7 Freiheitsgraden, sowie Drehmomentsensoren und hochgenaue Drehgeber in jeder Achse. Der Roboter eignet sich insbesondere für die Entwicklung neuartiger Regelungskonzepte sowie Konzepten für die Mensch-Maschine-Interaktion durch die Ansteuerung mit einer Abtastzeit von 8 kHz. |
 |
2 x KUKA LBR IV+
Der kollaborative Industrieroboter KUKA LBR IV+ ist der Vorgänger des KUKA LBR iiwa und ebenfalls für die Mensch-Maschine-Interaktion konzipiert. Der Roboter wird über das Fast Research Interface (FRI) mit einer Abtastrate von 1 kHz angesteuert und ist für einfache Positionieraufgaben und als Roboter für Nebenaufgaben geeignet. |
 |
COMAU Racer
Als „klassischer“ Industrieroboter mit 6 Freiheitsgraden kann der COMAU Racer angesehen werden. Mit einer Traglast von bis zu 7 kg ist der Roboter für hochdynamische Trajektorien geeignet. Der Roboter wird für die Entwicklung neuer Regelungskonzepte im Bereich von iterativ lernender Regelung (ILC), sowie für die Untersuchung der Absolut- und Bahngenauigkeit von robotischen Systemen eingesetzt. |
 |
2 x SCHUNK SDH-2
Die Schunk SDH-2 ist ein 3-Finger-Greifer mit insgesamt sieben Freiheitsgraden: Das sind zwei pro Finger und ein Freiheitsgrad, um die Finger zu drehen. Zusätzlich verfügt jeder Finger über zwei flächige hochsensible taktile Sensoren. Am Institut wurde eine Schnittstelle für die Ansteuerung mit geringer Abtastzeit entwickelt. |
Roboter mit paralleler Kinematik
 |
FESTO Tripod
Hochdynamischer Roboter mit Parallelkinematik und 4 Freiheitsgraden (3 translatorische Freiheitsgrade und eine Rotationseinheit). Die Bauweise mit Karbonstäben sorgt für hohe Steifigkeit und hohe Positioniergenauigkeit. Für die Interaktion mit der Umgebung ist der Endeffektor mit einem hochsensitiven 3-Achs-Kraftsensor ausgestattet. |
 |
Dart-Roboter
Innovativer Seilroboter mit redundanter Parallelkinematik und sechs Antriebsmotoren, welcher am Institut konzeptioniert, entwickelt und gebaut wurde. In einem planaren Arbeitsraum kann dieser Roboter eine Tournier-Dartscheibe mit hoher Dynamik sowohl positionieren als auch gleichzeitig rotieren. Während des Anflugs eines Dartpfeils kann dieser Roboter die Dartscheibe so positionieren, dass ein gewünschtes, vorgegebenes Feld auf dieser Scheibe getroffen wird – dafür steht nur eine kurze Zeitdauer von etwa 200 ms zur Verfügung. |
Mobile Roboter
 |
DS AUTOMATION Smart Shuttle „Sally”
Autonome mobile Plattform mit Laser-Scanner zum Abtasten der Umgebung und Einleiten von Not-Stopps. Auf der mobilen Plattform ist ein kompakter Montagerahmen aufgebaut, welcher die Montage eines KUKA LBR iiwa 14 R820 ermöglicht. Für die Ansteuerung des Roboters wird ein kompakter Beckhoff-Industrie-PC verwendet. In dieser Kombination wird das Smart Shuttle zu einer mobilen Greiferplattform. |
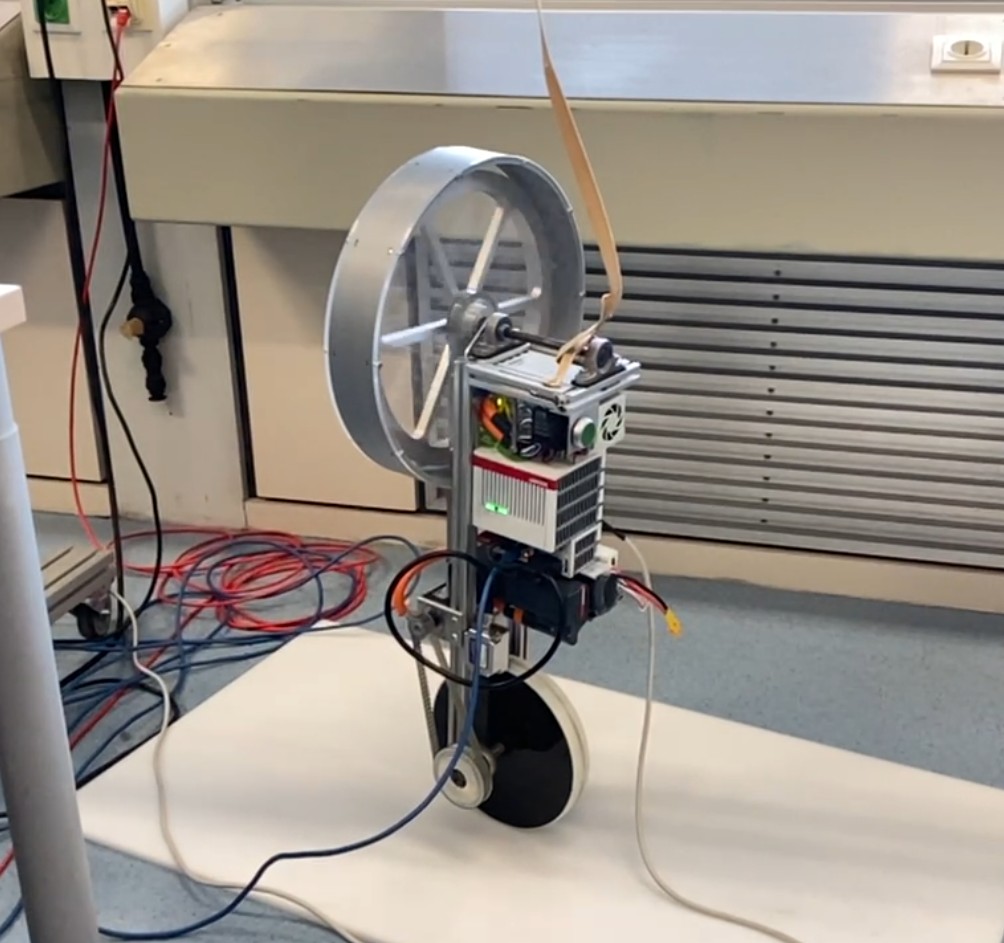 |
Single-Wheel-Robot
Der Single-Wheel-Robot ist ein balancierender Einrad-Roboter, welcher am Institut entwickelt und gebaut wurde. Der Roboter wird durch einen Beckhoff-Industrie-PC angesteuert und ist erweiterbar um viele Sensoren und Schnittstellen. |
Flugdrohnen
 |
INTEL Aero Drone Platform
Kommerzielle Drohnenplattform mit eingebauter Sensorik, Aktorik und viel On-Board-Rechenleistung. |
 |
Hexacopter
Der Hexacopter ist eine kommerzielle Flugdrohne, welche am Institut in seine Einzelteile zerlegt wurde und in Bezug auf Antriebstechnik, Recheneinheit und Regelungstechnik neu aufgebaut wurde. |