Industrielle Robotik
Im Forschungsfeld Industrielle Robotik wird an vielen Fragestellungen bei industriellen Robotersystemen sowie der physischen Mensch-Roboter-Interaktion geforscht, wobei dabei betrachteten Systeme von den klassischen Industrierobotern, über kollaborative Roboter bis hin zu mobilen Robotern und Flugdrohnen reichen. Es entstehen Lösungen für eine Vielzahl an unterschiedlichen Problemstellungen, von neuartigen Programmier- und Bedienkonzepten bis hin zu Algorithmen für komplexe Trajektorienplanung in hochredundanten Systemen.
Forschungsthemen
 |
 |
 |
|
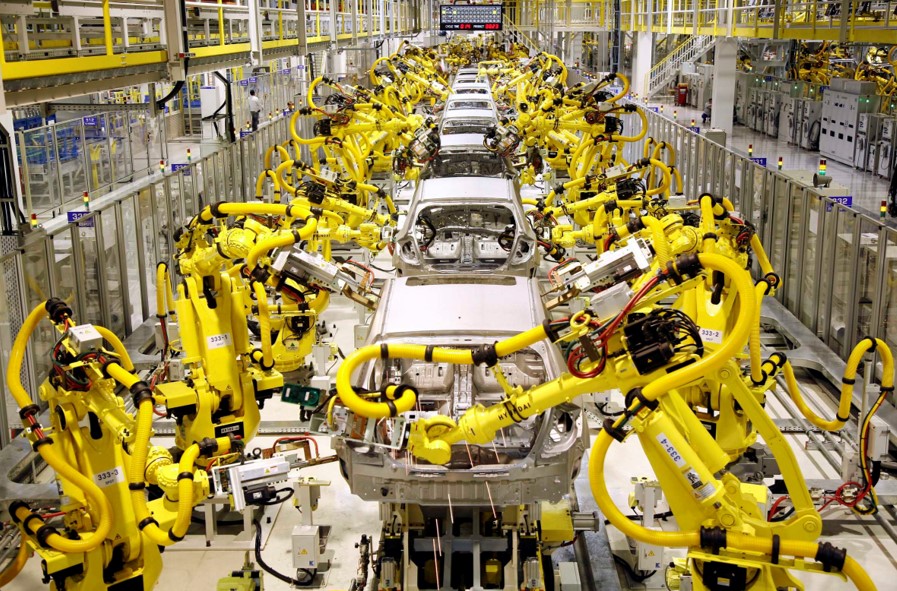
Industrielle Robotersysteme |
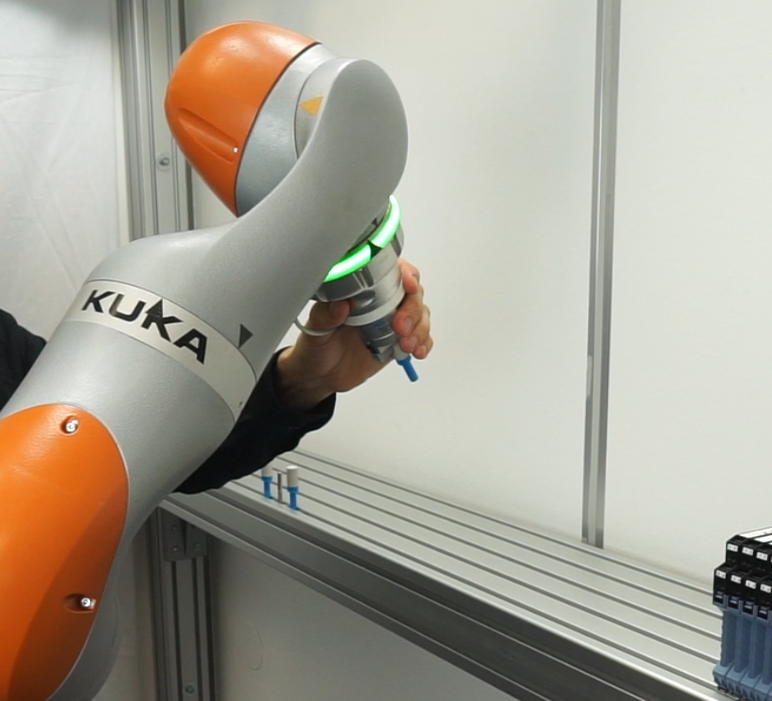
Physische Mensch-Roboter-Interaktion |
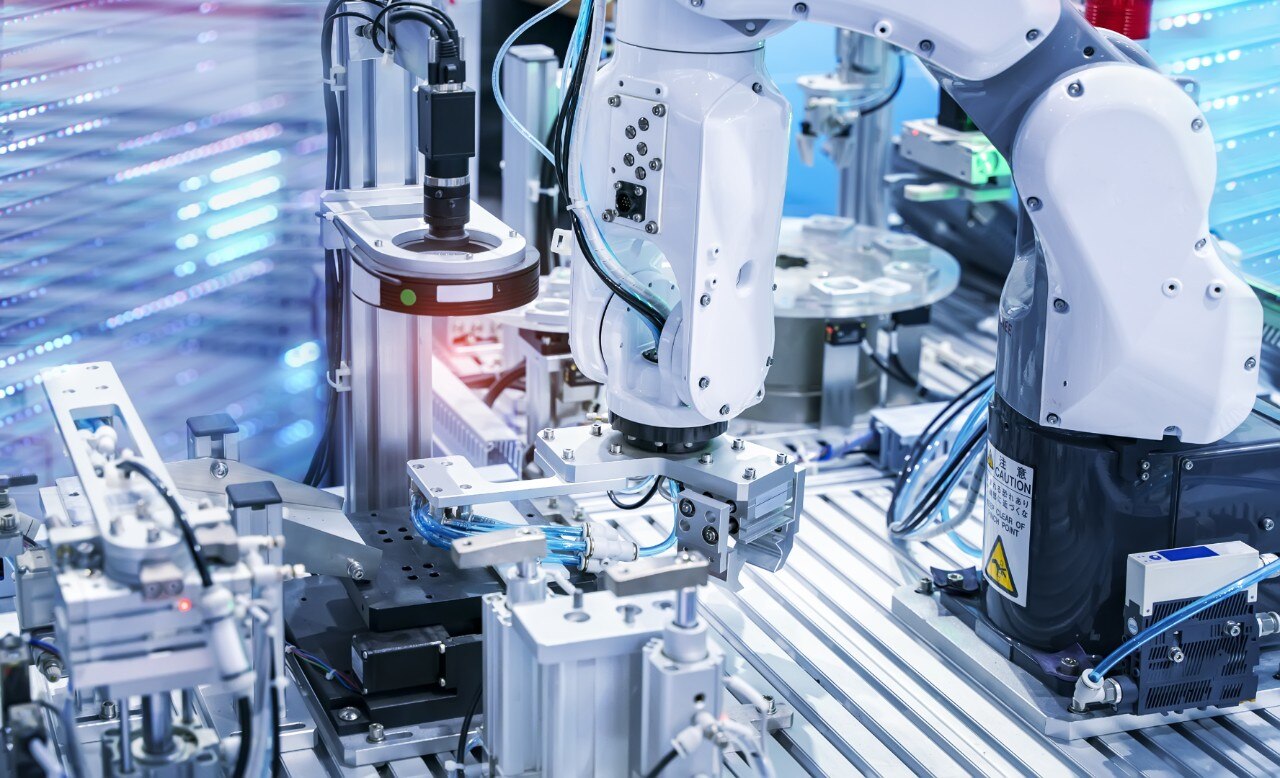
Autonome (Re-)Fabrikation |
Das Forschungsthema der industriellen Robotersysteme umfasst klassische Industrieroboter, kollaborative Roboter, Seilroboter, Linearantriebe, Portalsysteme, mobile Roboter, Flugdrohnen und reicht bis hin zu Großraummanipulatoren wie Baumaschinen und Autobetonpumpen. Am Beginn steht meist eine rigorose mathematische Modellierung unter Berücksichtigung von fortgeschrittenen kinematischen und dynamischen Effekten. Darauf aufbauend werden Simulations- und Visualisierungsmodelle entworfen, sowie fortgeschrittene Pfad- und Trajektorienpanungskonzepte sowie auch Regelungskonzepte erforscht.
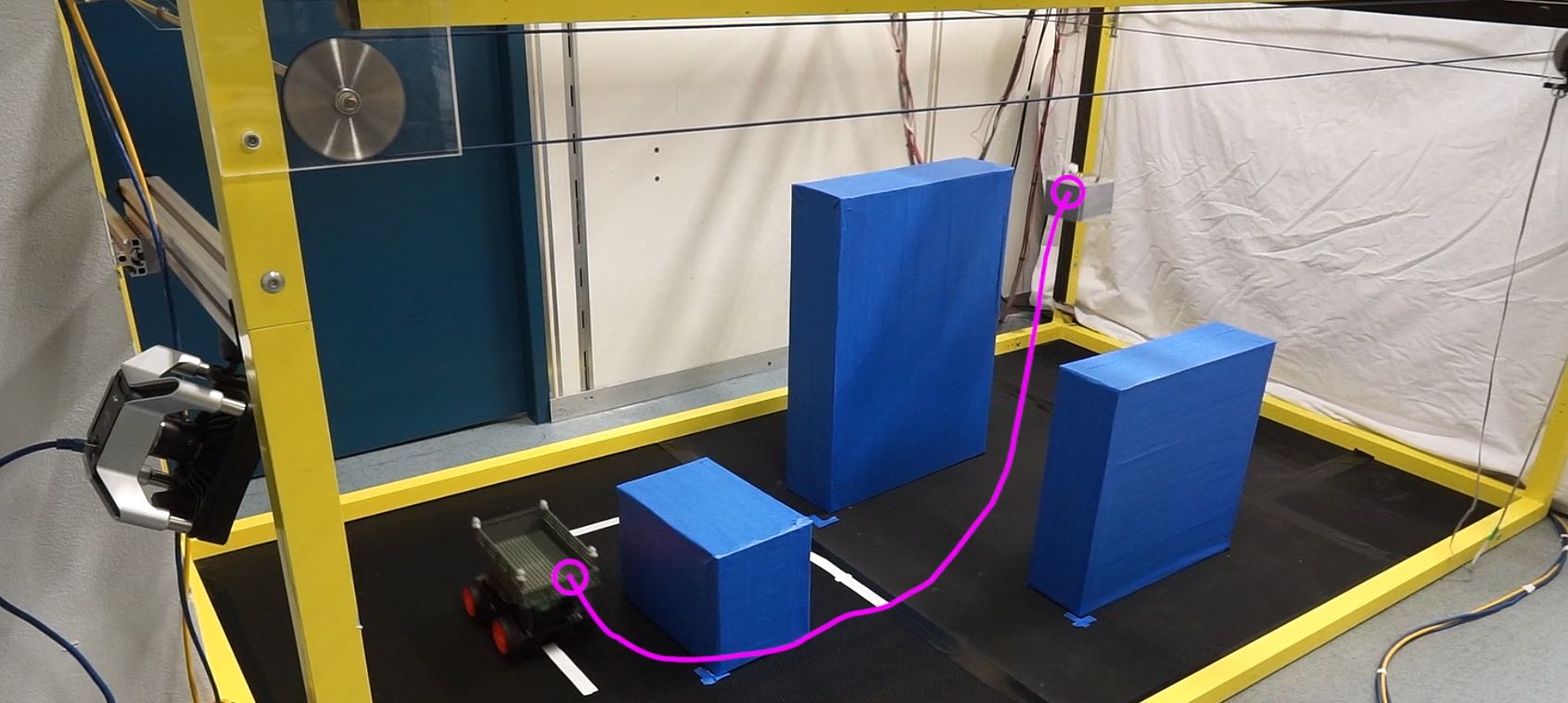
In der physischen Mensch-Roboter-Interaktion werden sowohl kollaborative Roboter, modulare Roboter als auch klassische Industrieroboter und in Kombination mit Linearachsen eingesetzt. Ausgestattet mit einer Vielzahl an Sensoren, können diese Robotersysteme in physischer Interaktion mit dem Menschen treten, sodass auch bei klassichen Industrierobotern der Schutzzaun entfällt. Basierend auf fortgeschrittenen Regelungskonzepten, wie der Pfadfolgeregelung, können neuartige Bedien- und Programmierkonzepte erforscht werden. Weiters liegt der Fokus bei reaktiven Online-Pfadplanern, welche auf schnelle Neuplanung, Kollisionsvermeidung und Vermeidung von kinematischen Singularitäten ausgerichtet sind.
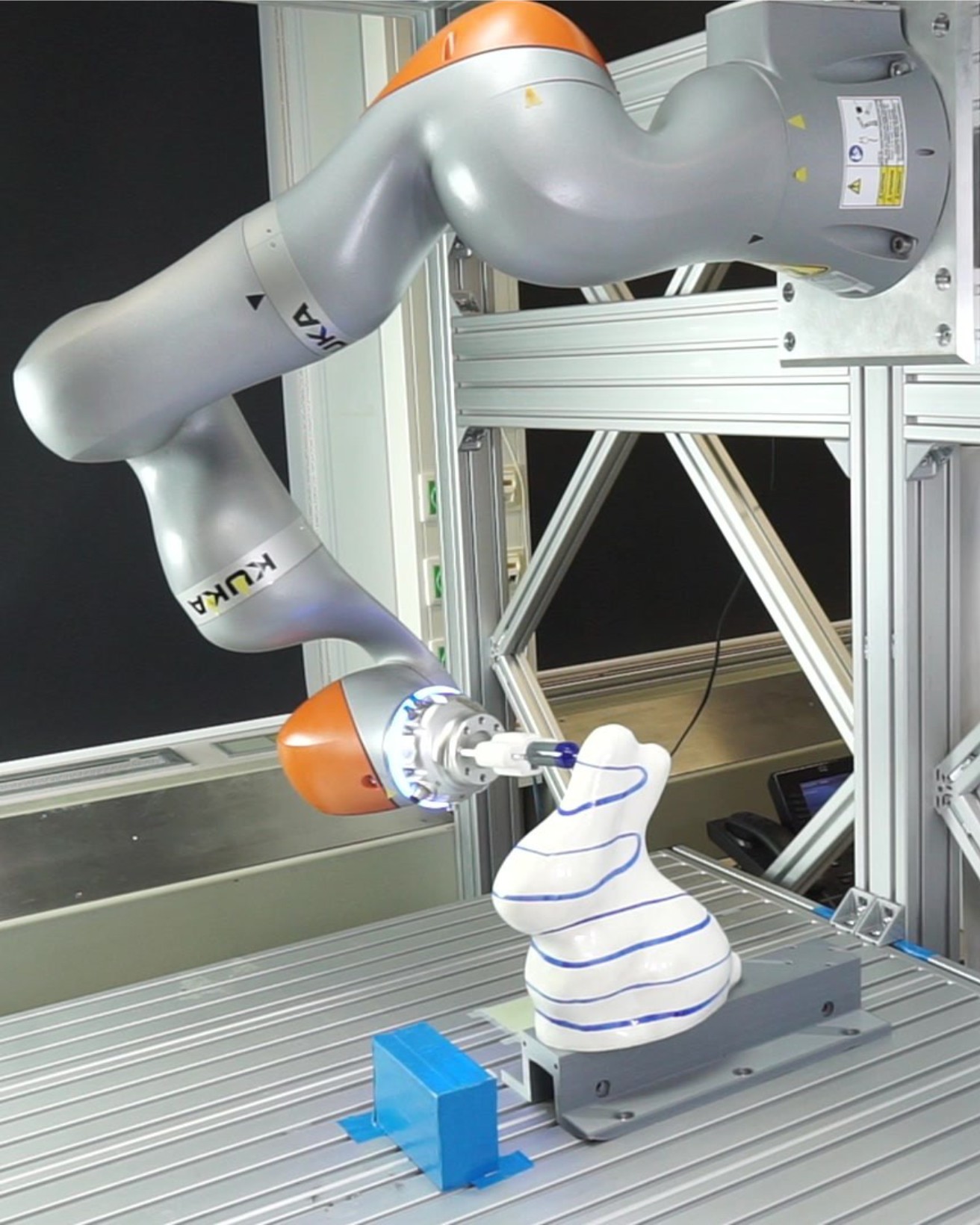
Im Forschungsthema Autonome (Re-)Fabrikation werden hochflexible Roboterarbeitszellen erforscht, welche selbsttätig industrielle Prozesse auf dreidimensionalen Freiformoberflächen ausführen können. Dabei werden sowohl Produktionsprozesse als auch Wiederaufarbeitungsprozesse betrachtet. Der auszuführende Prozess wird dabei zunächst durch den Menschen mithilfe von sogenannten instrumentierten Werkzeugen demonstriert und daraus werden die notwendigen Prozessparameter gelernt. Folglich kann das robotische System neue Werkstücke erfassen und digital rekonstruieren, den gewünschten Prozess auf diesem Werkstück planen und mit den geeigneten Interaktionskräften ausführen. Ein anschließender Evaluationsvorgang erlaubt es, die gelernten Prozessparameter weiter zu adaptieren und verbessern. Dieses Forschungsfeld wird maßgeblich durch das Festo Systemlabor für autonome Handhabungssysteme vorangetrieben.
Forschungsmethoden
 |
 |
 |
| Mathematische Modellierung von fortgeschrittenen kinematischen und dynamischen Effekten | Reaktive Pfadplanung | Komplexe Pfad- und Trajektorienplanung |
 |
 |
 |
| Fortgeschrittene Regelungskonzepte | Neuartige Bedien- und Programmierkonzepte | Vision-basierte Regelungskonzepte |
 |
 |
 |
| Maschinelles Lernen | Bearbeiten von dreidimensionalen Freiformoberflächen | Absolut- und Bahngenauigkeit |