Robotisches Bekleben von 3D-Objekten
Projektfokus
- Aufkleben von zugeschnittenen Klebebändern auf Freiform-3D-Oberflächen
- Drapieren mit einer definierten Normalkraft
- Roboterwerkzeug entlang eines Oberflächenpfades auf einer Freiform-3D-Oberfläche führen
Beschreibung
Die robotische Handhabung von formlabilen Materialen, wie z.B. Textilien, Karbon- und Glasfaserstoffe, Folien und Papier, ist seit langem eine herausfordernde Aufgabe in der Industrie und das wissenschaftliche Interesse
Robotische Handhabung von formlabilen Materialien wie z. B. Textilien, Karbon- und Glasfasergewebe, Folien und Papier ist seit langem eine herausfordernde Aufgabe in der Industrie und haben in jüngster Zeit große Aufmerksamkeit in der Forschung erhalten. Eine flexible Automatisierung auf menschlichem Niveau wurde für viele Handhabungsaufgaben noch nicht erreicht, wie z.B. das Greifen, Abstapeln und Drapieren. Die Hauptherausforderungen für automatisierte Handhabung von formlabilen Materialien sind ihre Eigenschaften, insbesondere das nichtlineare Materialverhalten, die Anisotropie, die vielseitigen Außenkonturen, die hohe Dimension des Objektzustands und die Vielzahl von Materialparametern wie Porosität und Dichte. In diesem Zusammenhang wurden viele spezialisierte mechatronische Lösungen zum Greifen und Transportieren implementiert. Die Industrie benötigt jedoch für die hohe Vielfalt und geringe Stückzahl flexiblere Lösungen.
In diesem Projekt wird ein flexibler Ansatz für das impedanzgeregelte faltenfreie Aufkleben von zugeschnittenen Klebebändern auf 3D-Freiformflächen vorgestellt. Für diese Anwendung wird ein Konzept für eine oberflächenbasierte Pfadfolgeregelung entwickelt, das auf einem lokalen Koordinatensystem aufbaut, basierend auf der Oberflächennormalen und der Pfadtangente. Darüber hinaus stellen die Algorithmen und Lösungen, die aus dieser Anwendung hervorgehen, auch eine Lösung für ein allgemeineres Problem in der Robotik dar: das Durchlaufen eines Werkzeugs entlang eines gekrümmten Pfades auf einer 3D-Freiformoberfläche mit definierten kinematischen Einschränkungen.
Der Aufklebeprozess besteht aus den folgenden Schritten und ist in Abb. 1 dargestellt:
- (a) 2D-Pfad für das Klebeband: Ein planarer Pfad wird auf der Form des planaren Klebebandes erstellt.
- (b) Übertragen auf das 3D-Objekt: Die Geometrie und Krümmung des planaren Pfades wird auf das CAD-Modell des 3D-Objekts abgebildet, wodurch ein 3D-Pfad erstellt wird.
- (c) Startposition des Roboters: Der Aufklebeprozess wird simuliert, um eine geeignete Startgelenkkonfiguration für den Roboter zu bestimmen, die zu einer kollisionsfreien Ausführung führt und eine angemessene Reserve in Bezug auf die Gelenkgrenzen aufweist.
- (d) Vorbereitung und Ausführung: Das vorgeschnittene Klebeband wird in der erforderlichen Startposition dem Applikationswerkzeug platziert und der Roboter führt den impedanzgesteuerten Aufklebeprozess durch.
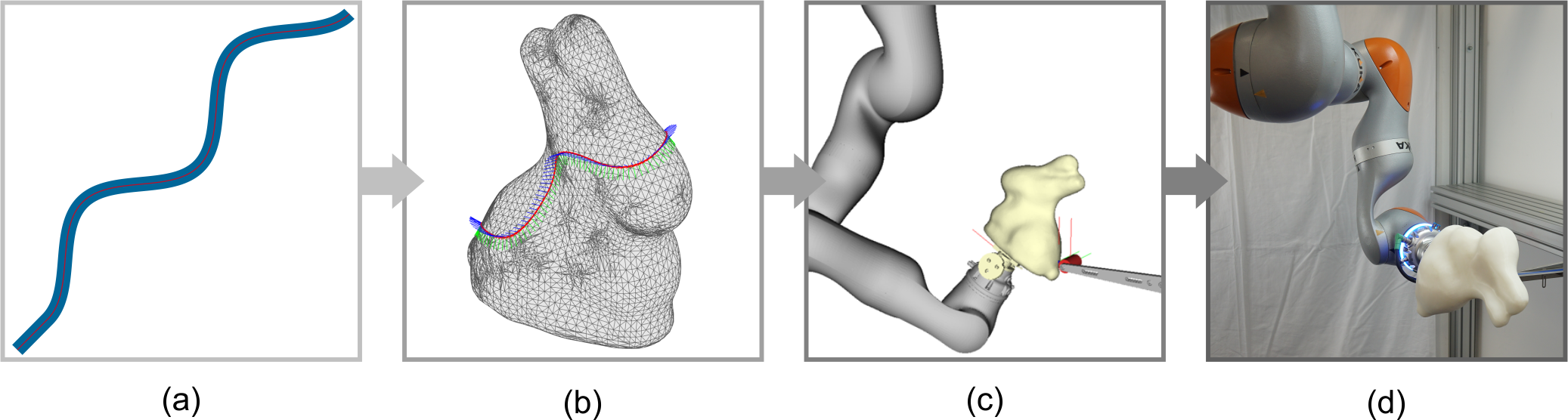
Aufklebeprozess im Überblick: (a) 2D-Pfad für das Klebeband, (b) Übertragen auf das 3D-Objekt, (c) Startposition des Roboters, (d) Vorbereitung und Ausführung.
Das oberflächenbasierte Konzept der Pfadfolgeregelung wird an einem 3D-gedruckten Objekt demonstriert, wie in Fig. 2 gezeigt: Die Pfade der zugeschnittenen Klebebänder in (a) werden auf die Oberfläche des 3D-Objekts in (b) übertragen. Das Ergebnis des Aufklebeprozesses ist in (c) dargestellt.
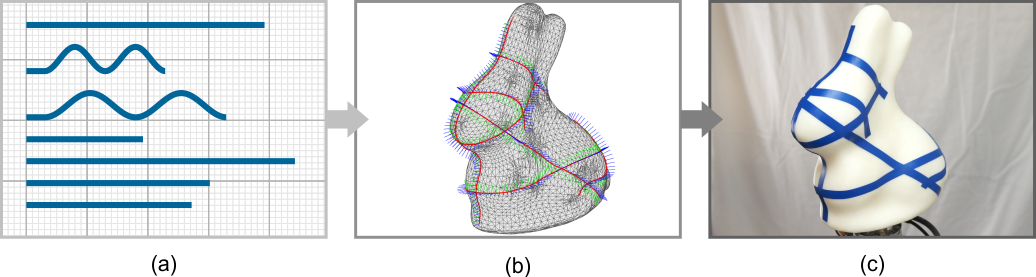
Experimentelle Ergebnisse für den Aufklebeprozess auf einem 3D-gedruckten Objekt: (a) Zugeschnittene Klebebänder (b) Übertragene 3D-Pfade auf das Objekt (c) Fertiggestelltes 3D-Objekt
Videos
Ausgewählte Publikationen
- T. Weingartshofer, M. Schwegel, C. Hartl-Nesic, T. Glück, and A. Kugi, Collaborative Synchronization of a 7-Axis Robot, in Proceedings of the 8th IFAC Symposium on Mechatronic Systems MECHATRONICS 2019, Vienna, Austria, 2019, pp. 507-512.
[BibTex]@InProceedings{Weingartshofer2019, author = {Weingartshofer, T. and Schwegel, M. and Hartl-Nesic, C. and Gl\"uck, T. and Kugi, A.}, title = {Collaborative Synchronization of a 7-Axis Robot}, booktitle = {Proceedings of the 8th IFAC Symposium on Mechatronic Systems MECHATRONICS 2019}, year = {2019}, volume = {52}, number = {15}, month = {9}, pages = {507-512}, doi = {10.1016/j.ifacol.2019.11.726}, address = {Vienna, Austria}, issn = {2405-8963}, } - C. Hartl-Nesic, B. Bischof, T. Glück, and A. Kugi, Pfadfolgeregelung mit Konzepten für den Pfadfortschritt: Ein Assemblierungsszenario, at – Automatisierungstechnik, vol. 68, iss. 1, p. 44–57, 2020.
[BibTex]@Article{Hartl-Nesic2020, author = {Hartl-Nesic, Christian and Bischof, Bernhard and Gl{\"u}ck, Tobias and Kugi, Andreas}, title = {Pfadfolgeregelung mit Konzepten für den Pfadfortschritt: Ein Assemblierungsszenario}, journal = {at -- Automatisierungstechnik}, year = {2020}, volume = {68}, number = {1}, pages = {44--57}, issn = {2196-677X}, doi = {10.1515/auto-2019-0114}, } - C. Hartl-Nesic, Surface-Based Path Following Control on Freeform 3D Objects, A. Kugi, K. Schlacher, and W. Kemmetmüller, Eds., Düren: Shaker Verlag, 2020, vol. 49.
[BibTex]@Book{HartlNesic2020, author = {Hartl-Nesic, C.}, title = {Surface-Based Path Following Control on Freeform 3D Objects}, editor = {A. Kugi and K. Schlacher and W. Kemmetm\"uller}, isbn = {978-3-8440-7637-0}, publisher = {Shaker Verlag}, series = {Modellierung und Regelung komplexer dynamischer Systeme}, volume = {49}, address = {D\"uren}, organization = {Institute f{\"u}r Automatisierungs- und Regelungstechnik (TU Wien) und Regelungstechnik und Prozessautomatisierung (JKU Linz)}, year = {2020}, } - C. Hartl-Nesic, T. Glück, and A. Kugi, Surface-Based Path Following Control: Application of Curved Tapes on 3-D Objects, IEEE Transactions on Robotics, vol. 37, iss. 2, p. 615–626, 2021.
[BibTex] [Download]@Article{HartlNesic2021, author = {Hartl-Nesic, Ch. and Gl{\"u}ck, T. and Kugi, A.}, title = {Surface-Based Path Following Control: Application of Curved Tapes on 3-D Objects}, doi = {10.1109/TRO.2020.3033721}, issn = {1552-3098}, number = {2}, pages = {615--626}, volume = {37}, journal = {IEEE Transactions on Robotics}, year = {2021}, }
Anwendungen
- Textil- und Bekleidungsindustrie
- Faserverstärkte Bauteile
- Lebensmittelindustrie