
Modellierung und optimale Regelung eines Langstatorlinearmotors
Projektschwerpunkte
- Modellierung des Linearmotors
- Optimale Strommuster für unterschiedliche Betriebsszenarien
- Entwicklung eines Regelungskonzepts zur Positionsregelung einer oder mehrerer Transporteinheiten
Beschreibung
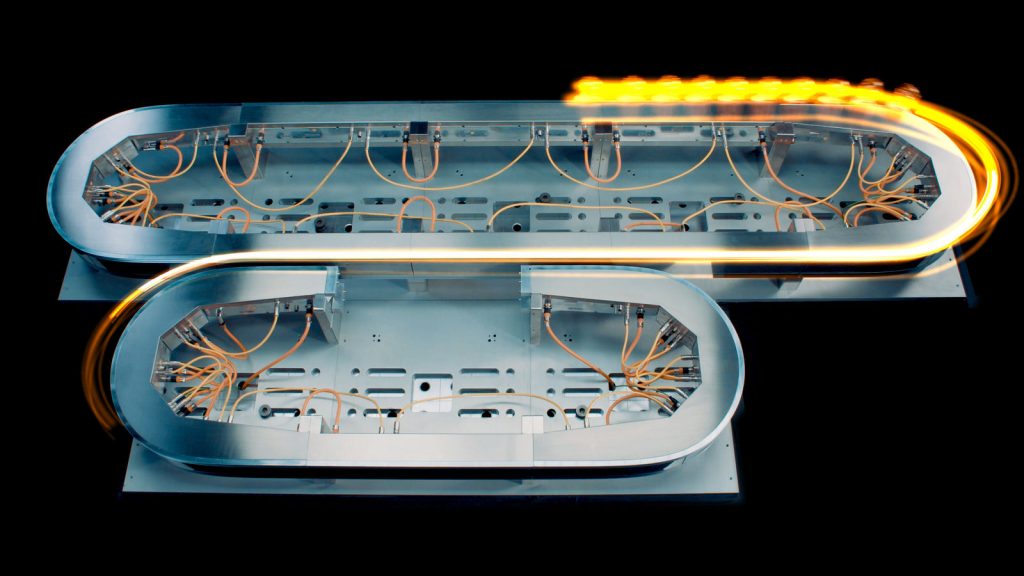
Die Verwendung von Langstatorlinearmotoren stellt für Produktionsanlagen ein flexibleres Transportsystem dar als vergleichsweise Förderbandanlagen. Die Bestückung mit mehreren Transporteinheiten bietet neben besseren Wartungsmöglichkeiten den Vorteil, dass die Abstände und somit die Laufzeiten der Transportprozesse variabel gestaltet werden können. Um einen hochdynamischen Betrieb zu ermöglichen ist ein detailliertes Modellwissen sowie eine ausgereifte Regelungsstrategie notwendig.
B&R Industrial Automation GmbH
Bei der Beschreibung von elektrischen Motoren ist zum einen die nichtlineare Materialsättigung des Statormaterials sowie eine ausgeprägte Reluktanzkraft eine besondere Problematik. Die gewählte Methode der Beschreibung mittels Reluktanznetzwerken erlaubt eine systematische Herleitung eines Motormodells unter Berücksichtigung der genannten Phänomene. Auf Basis dieses Modells werden Optimierungsprobleme formuliert, die eine optimale Bestromung der einzelnen Motorspulen unter der Vorgabe von Antriebs- sowie Normalkräften, welche auf die Transporteinheiten wirken sollen, errechnen. Zusätzlich werden die optimalen Strommuster durch Effizienzvorgaben beschränkt. Die Positionierung einer bzw. mehrerer Transporteinheiten erfolgt unter Verwendung dieser optimalen Strommuster. Dabei ergibt sich die Herausforderung, dass die Positioniergenauigkeit bei dicht geführten Transporteinheiten bestehen bleibt.
Projektpartner
Ansprechpartner
Univ.Prof. Dr.-Ing. Wolfgang KemmetmüllerUniv.-Prof. Dr.techn. Andreas Kugi