
Automated in-line metrology for nanopositioning systems (aim4np)
Project focus
- Mechanical design and analysis of a 6-DoF precision positioning system
- System modeling, control loop design and implementation
- Prototype design, system integration and testing
Description
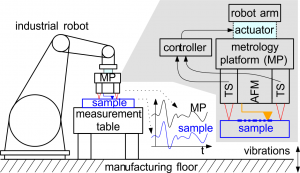
Vibration isolation concept for in-line nanometrology
Robot based in-process metrology is a key enabling technology for upcoming production systems and is considered as one of the most important preconditions for future production. Measuring properties at the nanometer scale such as topography, morphology and roughness within a production line becomes increasingly important for quality control and process monitoring tasks to make high tech production more efficient. Atomic Force Microscopes [AFM] and related scanning probe microscopes are commonly used to investigate the samples under test in great detail and with the required accuracy and spatial resolution. Such metrology tools are usually applied in a vibration-free scientific environment which is completely contrary to a production environment. Production facilities are populated with machines and working personal that introduce environmental vibrations typically exceeding the structure size of the sample. Comparable instruments that are compatible with production environments do not exist but are an absolute necessity to make the step into the next production era.
Within the scope of this project, a novel approach is developed for robot-based in-line metrology to isolate nanoscale measurements from environmental vibrations. Instead of isolating sample and robot from floor vibrations by means of passive or active vibration isolation aids, the distance between sample and metrology tool is kept constant. This is realized by a metrology platform, which will be brought in close proximity to the sample by an industrial robot. It is equipped with high precision position sensors, which measure the distance between sample and metrology platform. A six degree of freedom actuator creates the force for tracking the sample. Tracking of the sample is facilitated by a high bandwidth feedback control, hence forming a vibration-free environment for the nanoscale measurement directly in the production line.
Mechatronic Design and System Integration
On-site vibrations measurements are conducted to derive system requirements, and to specify requirements on the component level. A holistic design approach is applied that considers control relevant requirements already in the mechanical and electronic design steps to achieve a high performance of the mechatronic system. For example, such requirements concern the need for compactness and high stiffness of the inspection tools as they are actively moved by the platform, which is in conflict with their usage in vibration-free environments.
This results in a compact six degrees of freedom Lorentz actuator (zero stiffness actuation) with a gravity compensator powered by high bandwidth current controlled amplifiers, and a balanced design to minimize actuation power. By using finite element analysis tools, the structural stiffness of the platform is analysed with the aim to enable high bandwidth position control.
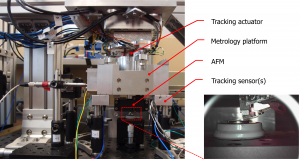
Experimental metrology platform setup with on-board AFM
Scientific Imaging and Metrology Systems
An AFM head with a self-sensing cantilever is installed and used as inspection tool. Imaging of test gratings, plastic injection samples and nanowires could be successfully demonstrated.
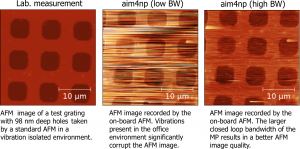
AFM imaging in a noisy environment
Precision Motion Control
Modelbased control techniques are applied to incorporate higher order plant dynamics such as caused by structural resonances of the mechanical structure. A system model is built to decouple the MIMO plant, resulting in the implementation of SISO controllers for each degree of freedom. Switching control techniques are researched to operate the metrology platform in two different modes, which are the control with sensors mounted in the actuator and the control with the tracking sensor. Further new approaches are developed to allow high bandwidth control of a body with high resonance frequencies that is mechanically coupled to a body exhibiting low resonance frequencies.
Videos
Applications
- In-line metrology
- Nanopositioning systems
Related publications
- J. Fraxedas, U. Staufer, R. Munnig Schmidt, J. W. Spronck, E. R. Trinidad, R. Deng, G. Schitter, M. Thier, S. Messineo, S. Ito, R. Hainisch, R. Saathof, F. Perez-Murano, A. Verdaguer, A. Blümel, E. J. W. List-Kratochvil, R. Koops, M. van Veghel, R. Sum, A. Lieb, W. Schott, D. Dontsov, T. Sulzbach, W. Engl, C. Penzkofer, C. Colominas, K. Fluch, A. Garcia-Granada, J. Puigoriol-Forcada Josep MariaFraxedas, U. Staufer, R. Munnig Schmidt, J. W. Spronck, E. R. Trinidad, R. Deng, G. Schitter, M. Thier, S. Messineo, S. Ito, R. Hainisch, R. Saathof, F. Perez-Murano, A. Verdaguer, A. Blümel, E. J. W. List-Kratochvil, R. Koops, M. van Veghel, R. Sum, A. Lieb, W. Schott, D. Dontsov, T. Sulzbach, W. Engl, C. Penzkofer, C. Colominas, K. Fluch, A. Garcia-Granada, and J. M. Puigoriol-Forcada, Automated inline Metrology for Nanoscale Production – aim4np, in 3rd International Conference on Industrial Technologies Research and Innovation, 2014.
[BibTex]@Conference{TUW-236535, Title = {Automated inline Metrology for Nanoscale Production - aim4np}, Author = {Fraxedas, Jordi and Staufer, Urs and Munnig Schmidt, Robert and Spronck, Jo W. and Trinidad, Enrique Rull and Deng, Ruijun and Schitter, Georg and Thier, Markus and Messineo, Saverio and Ito, Shingo and Hainisch, Reinhard and Saathof, Rudolf and Perez-Murano, Francesc and Verdaguer, Albert and Bl{\"u}mel, Alexander and List-Kratochvil, Emil J. W. and Koops, Richard and van Veghel, Marijn and Sum, Robert and Lieb, Andreas and Schott, Walter and Dontsov, Denys and Sulzbach, Thomas and Engl, Wolfgang and Penzkofer, Christian and Colominas, Carles and Fluch, Karl and Garcia-Granada, Andr{\'e}s-Amador and Puigoriol-Forcada, Josep MariaFraxedas, Jordi and Staufer, Urs and Munnig Schmidt, Robert and Spronck, Jo W. and Trinidad, Enrique Rull and Deng, Ruijun and Schitter, Georg and Thier, Markus and Messineo, Saverio and Ito, Shingo and Hainisch, Reinhard and Saathof, Rudolf and Perez-Murano, Francesc and Verdaguer, Albert and Bl{\"u}mel, Alexander and List-Kratochvil, Emil J. W. and Koops, Richard and van Veghel, Marijn and Sum, Robert and Lieb, Andreas and Schott, Walter and Dontsov, Denys and Sulzbach, Thomas and Engl, Wolfgang and Penzkofer, Christian and Colominas, Carles and Fluch, Karl and Garcia-Granada, Andr{\'e}s-Amador and Puigoriol-Forcada, Josep Maria}, Booktitle = {3rd International Conference on Industrial Technologies Research and Innovation}, Year = {2014}, Doi = {10.13140/2.1.3459.3607} }
- M. Thier, R. Saathof, A. Sinn, R. Hainisch, and G. Schitter, Six Degree of Freedom Vibration Isolation Platform for In-Line Nano-Metrology, in Proceedings of the 7th IFAC Symposium on Mechatronic Systems, 2016, p. 149–156.
[BibTex]@InProceedings{TUW-251134, Title = {Six Degree of Freedom Vibration Isolation Platform for In-Line Nano-Metrology}, Author = {Thier, Markus and Saathof, Rudolf and Sinn, Andreas and Hainisch, Reinhard and Schitter, Georg}, Booktitle = {Proceedings of the 7th IFAC Symposium on Mechatronic Systems}, Year = {2016}, Note = {Vortrag: 7th IFAC Symposium on Mechatronic Systems {\&} 15th Mechatronics Forum International Conference, Loughborough (Vereinigte K{\"o}nigreich); 2016-09-05 -- 2016-09-08}, Pages = {149--156}, Doi = {10.1016/j.ifacol.2016.10.534}, Keywords = {Vibration isolation, Systems design, Nano-metrology, Precision positioning systems.} }
- E. Csencsics, M. Thier, P. Siegl, and G. Schitter, Mechatronic Design of an Active Two-body Vibration Isolation System, in Proceedings of the 7th IFAC Symposium on Mechatronic Systems, 2016, p. 133–140.
[BibTex] [Download]@InProceedings{TUW-251120, author = {Csencsics, Ernst and Thier, Markus and Siegl, Philipp and Schitter, Georg}, title = {Mechatronic Design of an Active Two-body Vibration Isolation System}, booktitle = {Proceedings of the 7th IFAC Symposium on Mechatronic Systems}, year = {2016}, pages = {133--140}, note = {Vortrag: 7th IFAC Symposium on Mechatronic Systems {\&} 15th Mechatronics Forum International Conference, Loughborough (Vereinigte K{\"o}nigreich); 2016-09-05 -- 2016-09-08}, doi = {10.1016/j.ifacol.2016.10.532}, keywords = {Vibration isolation, Systems design, Mechanical decoupling, PID controllers, Reduced energy consumption} }
- F. Cigarini, E. Csencsics, R. Saathof, and G. Schitter, Design of Tuneable Damping for Precision Positioning of a Two-Body System, in Proceedings of the 7th IFAC Symposium on Mechatronic Systems, 2016, p. 222–227.
[BibTex] [Download]@InProceedings{TUW-251116, author = {Cigarini, Francesco and Csencsics, Ernst and Saathof, Rudolf and Schitter, Georg}, title = {Design of Tuneable Damping for Precision Positioning of a Two-Body System}, booktitle = {Proceedings of the 7th IFAC Symposium on Mechatronic Systems}, year = {2016}, pages = {222--227}, note = {Posterpr{\"a}sentation: 7th IFAC Symposium on Mechatronic Systems {\&} 15th Mechatronics Forum International Conference, Loughborough (Vereinigte K{\"o}nigreich); 2016-09-05 -- 2016-09-08}, doi = {10.1016/j.ifacol.2016.10.554}, keywords = {Two-body systems, precision positioning, damping} }
- M. Thier, R. Saathof, E. Csencsics, R. Hainisch, A. Sinn, and G. Schitter, Entwurf und Regelung eines Positioniersystems für robotergestützte Nanomesstechnik, at – Automatisierungstechnik, vol. 63, p. 727–738, 2015.
[BibTex] [Download]@Article{TUW-242211, author = {Thier, Markus and Saathof, Rudolf and Csencsics, Ernst and Hainisch, Reinhard and Sinn, Andreas and Schitter, Georg}, title = {Entwurf und Regelung eines Positioniersystems f{\"u}r robotergest{\"u}tzte Nanomesstechnik}, journal = {at - Automatisierungstechnik}, year = {2015}, volume = {63}, pages = {727--738}, doi = {10.1515/auto-2015-0044}, keywords = {In-Prozess-Messtechnik, Pr{\"a}zisionspositionierung, Pr{\"a}zisionsmesstechnik, Instrumentierung.}, }
- R. Saathof, M. Thier, R. Heinisch, and G. Schitter, Integrated system and control design of a one DoF nano-metrology platform, Mechatronics, vol. 47, pp. 88-96, 2017.
[BibTex]@Article{TUW-20170925, Title = {Integrated system and control design of a one DoF nano-metrology platform}, Author = {Saathof, R. and Thier, M. and Heinisch, R. and Schitter, G.}, Journal = {Mechatronics}, Year = {2017}, Pages = {88-96}, Volume = {47}, Doi = {10.1016/j.mechatronics.2017.08.013} }
Project partners
- Project leader: TU Delft (Prof. Urs Staufer, Dep. Precision and Microsystems Engineering)
- CIN2 & CNM, CSICS
- Flubetech S.L.
- IQS
- Joanneum Research
- Nanosurf AG
- Nanotools GmbH
- Nanoworld
- SIOS Meßtechnik GmbH
- VSL
Funding
Ansprechpartner
Univ.-Prof. Dipl.-Ing. Dr.sc.techn. Georg SchitterDipl.-Ing. Markus Thier
ProjektmitarbeiterInnen
Associate Prof. Dipl.-Ing. Dr.techn. Ernst CsencsicsDott. mag. Francesco Cigarini
Dipl.-Ing. Andreas Sinn
Dipl.-Ing. Markus Thier
Dr. Rudolf Saathof
Dr. Reinhard Hainisch
Markus Gurtner, BSc.
Wolfgang Stritzinger, Bsc.
Christoph Kerschner, BSc.
Status
abgeschlossenExterne Projektseite
http://www.aim4np.eu/Weiterführende Links
Project presentation by Prof. Urs Staufer (TU Delft)
Offene Stellen
The AMS group offers vacant positions at PhD and PostDoc level