
Hybrid reluctance actuators for high precision motion
Project focus
- Hybrid reluctance actuators (HRAs) realize a motor constant higher than comparable voice coil actuators for motion control with nanometer resolution.
- HRAs’ magnetic force cancels the stiffness of guiding flexures for large motion and energy efficiency.
- Integrated mechatronic system design enables a robust PID controller to realize a high bandwidth.
Description
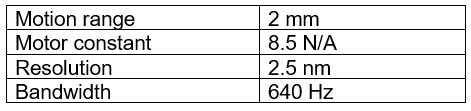
Next-generation high-quality motion systems require high-precision actuators with higher energy efficiency and larger force to improve the system throughput. Particularly, actuators with a motor constant higher than comparable voice coil actuators are highly desired. This project investigates hybrid reluctance actuators (HRAs) with guiding flexures as a promising candidate of next-generation systems. The following table and video show the currently ahcieved performance:
Table 1: Evaluated performance of a HRA
Actuation principle
A hybrid reluctance actuator (HRA) uses a permanent magnet and coils to generate magnetic fluxes through the ferromagnetic stator and mover. As Fig. 1(a) illustrates, the direction of the coil’s flux is the opposite of the magnet’s flux in the variable right gap. These fluxes cancel each other. Consequently, the total flux in the variable right gap is weaker than that in the variable left gap. The unbalanced flux results in the lateral actuation force.
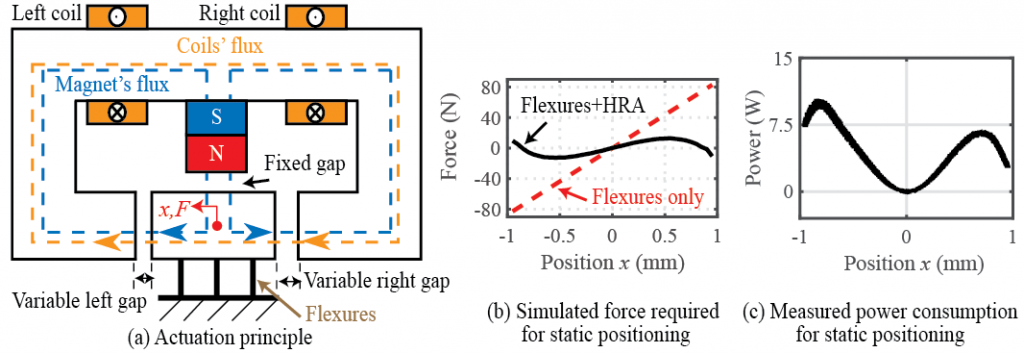
Actuation principle with simulation and experimental results [S. Ito et al., IEEE TIE, 66(4), pp. 3051 – 3059, 2019].
Stiffness cancellation for long-range motion and high energy efficiency
A challenge of flexure-guided systems in general is that positioning requires a constant force against the flexure stiffness, which is significant around the stroke end. For energy efficiency, a HRA is designed such that its negative stiffness cancels the flexure stiffness. The simulation in Fig. 1(b) shows that the negative stiffness decreases the force required for a quasi-static positioning from more than +/-80 N to less than +/-15 N. The experiment in Fig. 1(c) reveals that the power required for the positioning around the stroke end at 1 mm is less than that around 0.7mm, demonstrating the effectiveness of the stiffness cancellation.
For high precision motion, the HRA is designed such that a robust PID controller with a position sensor compensates for the nonlinear negative stiffness for closed-loop stability within the entire actuation rage of 2 mm. The closed-loop system achieves a positioning resolution of 2.5 nm and a bandwidth of 640 Hz. Furthermore, data-driven learning control is combined for accurate scanning motion. The experimental results in Fig. 2 show triangular scanning motions with an amplitude of 1.6 mm at 1 Hz and with an amplitude of 10 um at 100 Hz, where the tracking error is 10 nm (rms). Overall, the HRA realizes a large dynamic range with high energy efficiency.
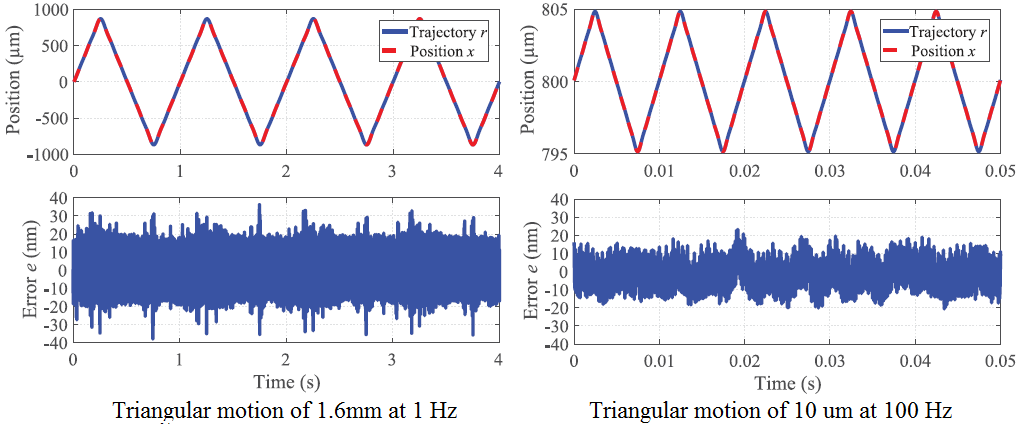
Measured triangular scanning motions with robust PID and learning control for motion control [S. Ito et al., IEEE TIE, 66(4), pp. 3051 – 3059, 2019].
Magnetic flux feedback control for system linearity
HRAs exhibit nonlinearities, which include not only the negative stiffness, but also the magnetic hysteresis seen in a B-H curve. They impair scanning motions and can make HRAs open-loop unstable with a commonly used current amplifiers. Such nonlinearities are compensated by replacing conventional current amplifiers by a proposed flux amplifier where feedback control regulates a magnetic flux within the frequency band of interest.
As illustrated in Fig. 3, the flux loop includes the B-H hysteresis between the coil current and the resulting flux. Furthermore, the position-dependent flux that results in the negative stiffness is regarded as a disturbance. Consequently, the flux feedback controller rejects the nonlinearities. In fact, experimental results in Fig. 4 demonstrate that the proposed flux amplifier significantly decreases the motion error of a triangular scanning in comparison with a conventional current amplifier, even without real-time motion control.
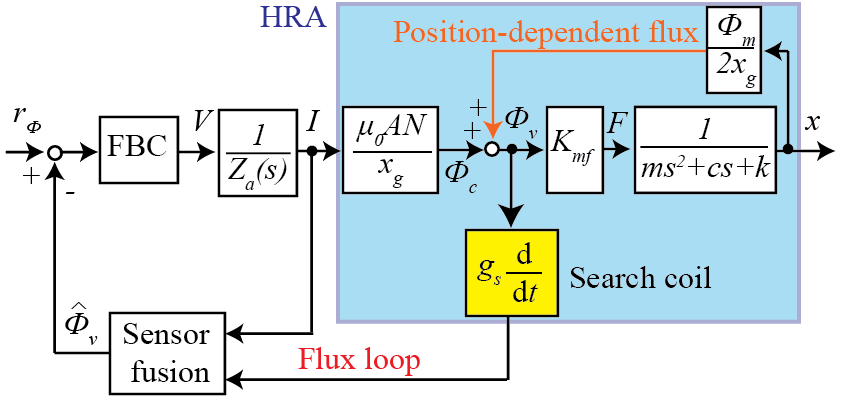
Block diagram of a HRA with flux control [S. Ito et al., IEEE TIE, In press].
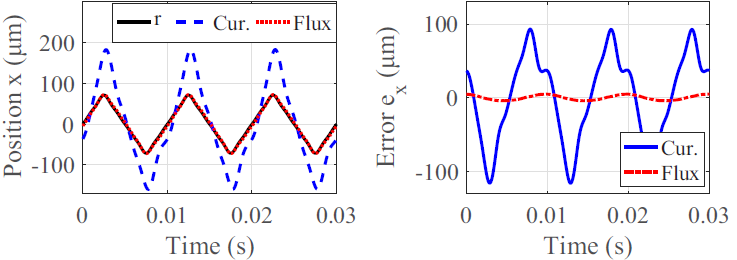
Measured triangular scanning motion with proposed flux control and conventional current control without real-time motion control [S. Ito et al., IEEE TIE, In press].
Applications
- Nanopositioner / Micropositioner
- Dual stage actuator
- Scanner
- Vibration isolation
Related publications
Journal articles
- S. Ito, F. Cigarini, and G. Schitter, Flux-controlled Hybrid Reluctance Actuator for High-precision Scanning Motion, IEEE Transactions on Industrial Electronics, vol. 67, iss. 11, pp. 9593-9600, 2020.
[BibTex] [Download]@Article{TUW-282490, author = {Ito, Shingo and Cigarini, Francesco and Schitter, Georg}, title = {Flux-controlled Hybrid Reluctance Actuator for High-precision Scanning Motion}, journal = {IEEE Transactions on Industrial Electronics}, year={2020}, volume={67}, number={11}, pages={9593-9600}, doi = {10.1109/TIE.2019.2952829}, keywords = {Actuators, Nanopositioning, Magnetic variables control, Motion control}, }
- S. Ito, S. Troppmair, B. Lindner, F. Cigarini, and G. Schitter, Long-range Fast Nanopositioner Using Nonlinearities of Hybrid Reluctance Actuator for Energy Efficiency, IEEE Transactions on Industrial Electronics, vol. 66, iss. 4, 2019.
[BibTex] [Download]@Article{TUW-271193, author = {Ito, Shingo and Troppmair, Stefan and Lindner, Bernhard and Cigarini, Francesco and Schitter, Georg}, title = {Long-range Fast Nanopositioner Using Nonlinearities of Hybrid Reluctance Actuator for Energy Efficiency}, journal = {IEEE Transactions on Industrial Electronics}, year = {2019}, volume = {66}, number = {4}, doi = {10.1109/TIE.2018.2842735}, keywords = {Actuators, motion control, nanoposition- ing, magnetic circuits}, numpages = {9}, }
- F. Cigarini, S. Ito, S. Troppmair, and G. Schitter, Comparative Finite Element Analysis of a Voice Coil Actuator and a Hybrid Reluctance Actuator, IEEJ Journal of Industry Applications, vol. 8, iss. 2, 2019.
[BibTex]@Article{TUW-276121, author = {Cigarini, Francesco and Ito, Shingo and Troppmair, Stefan and Schitter, Georg}, title = {Comparative Finite Element Analysis of a Voice Coil Actuator and a Hybrid Reluctance Actuator}, journal = {IEEJ Journal of Industry Applications}, year = {2019}, volume = {8}, number = {2}, doi = {10.1541/ieejjia.8.192}, keywords = {Electromagnetic actuators, high-precision motion, finite element analysis}, numpages = {8} }
- S. Ito, S. Troppmair, F. Cigarini, and G. Schitter, High-speed Scanner with Nanometer Resolution Using a Hybrid Reluctance Force Actuator, IEEJ Journal of Industry Applications, vol. 8, iss. 2, 2019.
[BibTex]@Article{TUW-272944, author = {Ito, Shingo and Troppmair, Stefan and Cigarini, Francesco and Schitter, Georg}, title = {High-speed Scanner with Nanometer Resolution Using a Hybrid Reluctance Force Actuator}, journal = {IEEJ Journal of Industry Applications}, year = {2019}, volume = {8}, number = {2}, doi = {10.1541/ieejjia.8.170}, keywords = {High-precision actuators, hybrid reluctance actuator, nanopositioning, motion control.}, numpages = {7} }
Conference papers
- F. Cigarini, S. Ito, J. Konig, A. Sinn, and G. Schitter, Compensation of Hysteresis in Hybrid Reluctance Actuator for High-Precision Motion, in Proceedings of the Joint Conference 8th IFAC Symposium on Mechatronic Systems (MECHATRONICS 2019), and 11th IFAC Symposium on Nonlinear Control Systems (NOLCOS 2019), 2019.
[BibTex]@InProceedings{TUW-281659, author = {Cigarini, Francesco and Ito, Shingo and Konig, Julian and Sinn, Andreas and Schitter, Georg}, title = {Compensation of Hysteresis in Hybrid Reluctance Actuator for High-Precision Motion}, booktitle = {Proceedings of the Joint Conference 8th IFAC Symposium on Mechatronic Systems (MECHATRONICS 2019), and 11th IFAC Symposium on Nonlinear Control Systems (NOLCOS 2019)}, year = {2019}, volume = {52/15}, note = {Vortrag: Joint Conference 8th IFAC Symposium on Mechatronic Systems (MECHATRONICS 2019), and 11th IFAC Symposium on Nonlinear Control Systems (NOLCOS 2019), Wien; 2019-09-04 -- 2019-09-06}, doi = {10.1016/j.ifacol.2019.11.721}, journal = {IFAC-PapersOnLine/Elsevier}, keywords = {Hybrid reluctance actuator, magnetic hysteresis, magnetic flux control}, numpages = {6} }
- S. Ito, B. Lindner, and G. Schitter, Sample-tracking Vibration Isolation with Hybrid Reluctance Actuators for Inline Metrology, in Proceedings of the Joint Conference 8th IFAC Symposium on Mechatronic Systems (MECHATRONICS 2019), and 11th IFAC Symposium on Nonlinear Control Systems (NOLCOS 2019), 2019.
[BibTex]@InProceedings{TUW-281655, author = {Ito, Shingo and Lindner, Bernhard and Schitter, Georg}, title = {Sample-tracking Vibration Isolation with Hybrid Reluctance Actuators for Inline Metrology}, booktitle = {Proceedings of the Joint Conference 8th IFAC Symposium on Mechatronic Systems (MECHATRONICS 2019), and 11th IFAC Symposium on Nonlinear Control Systems (NOLCOS 2019)}, year = {2019}, volume = {52/15}, note = {Vortrag: Joint Conference 8th IFAC Symposium on Mechatronic Systems (MECHATRONICS 2019), and 11th IFAC Symposium on Nonlinear Control Systems (NOLCOS 2019), Wien; 2019-09-04 -- 2019-09-06}, doi = {10.1016/j.ifacol.2019.11.731}, journal = {IFAC-PapersOnLine/Elsevier}, keywords = {Vibration control, Micro and Nano Mechatronic Systems, Motion Control Systems}, numpages = {6} }
- F. Cigarini, S. Ito, S. Troppmair, and G. Schitter, Comparison of a Voice Coil and a Hybrid Reluctance Actuator via FEM, in Proceedings of the IEEJ International Workshop on Sensing, Actuation, Motion Control and Optimization (SAMCON), 2018.
[BibTex]@InProceedings{TUW-268854, author = {Cigarini, Francesco and Ito, Shingo and Troppmair, Stefan and Schitter, Georg}, title = {Comparison of a Voice Coil and a Hybrid Reluctance Actuator via FEM}, booktitle = {Proceedings of the IEEJ International Workshop on Sensing, Actuation, Motion Control and Optimization (SAMCON)}, year = {2018}, note = {Vortrag: IEEJ International Workshop on Sensing, Actuation, Motion Control and Optimization (SAMCON), Tokyo (Japan); 2018-03-06 -- 2018-03-09}, keywords = {Electromagnetic actuators, high-precision applications, finite element method}, numpages = {6} }
- S. Ito, S. Troppmair, F. Cigarini, and G. Schitter, Hybrid Reluctance Actuator for High-speed Scanning with Nanometer Resolution, in Proceedings of the IEEJ International Workshop on Sensing, Actuation, Motion Control and Optimization (SAMCON), 2018.
[BibTex]@InProceedings{TUW-268844, author = {Ito, Shingo and Troppmair, Stefan and Cigarini, Francesco and Schitter, Georg}, title = {Hybrid Reluctance Actuator for High-speed Scanning with Nanometer Resolution}, booktitle = {Proceedings of the IEEJ International Workshop on Sensing, Actuation, Motion Control and Optimization (SAMCON)}, year = {2018}, note = {Vortrag: IEEJ International Workshop on Sensing, Actuation, Motion Control and Optimization (SAMCON), Tokyo (Japan); 2018-03-06 -- 2018-03-09}, numpages = {6} }
Project Partners
Funding
Contact
Univ.-Prof. Dipl.-Ing. Dr.sc.techn. Georg SchitterMAS, Dr.techn. Shingo Ito
Associate Prof. Dipl.-Ing. Dr.techn. Ernst Csencsics
Project Staff
MAS, Dr.techn. Shingo ItoAssociate Prof. Dipl.-Ing. Dr.techn. Ernst Csencsics
MSc, Francesco Cigarini