
OptoFence II
Project goals
- Development of a fast telescope system for UAV detection and tracking
- Real-time deep learning object detection and tracking
- Camera-based control with high-speed auto focus
Description
Drones and other types of unmanned aerial vehicles (UAVs) have gained massive popularity not only in the professional but also in the private sector in recent years. Incidents such as the closure of London’s Gatwick Airport due to a drone sighting demonstrate that advances in UAV technology pose a threat to public safety. The early identification of incoming UAVs is of the highest priority for situational assessment.
Commercial drone detection systems use a multispectral approach for object detection and identification. For this purpose, the interaction of different sensors is used to be able to recognize and identify objects. The figure below shows an example where an object at a distance of 5 to 10 km is detected using radar. The problem, however, is that it is difficult to differentiate between a UAV and, for example, a bird. Optical sensors are used for this, which can clearly classify the object based on a recorded camera image. The operational distance of this optical component is currently limited to one to two kilometers, which only allows short reaction times in the event of a threat.
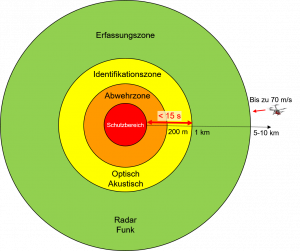
Illustration of a commercial drone detection system. State of the art technology provides in worst case only 15s for optical detection, identification and situation assessment.
OptoFence II aims to develop a telescope-based optical platform to enable a larger identification area, which significantly increases situational awareness. The combination of a precise and fast mount, a high-quality telescope, a camera system and advanced methods of control systems and computer vision creates a versatile platform for the optical detection, tracking and identification of UAVs.
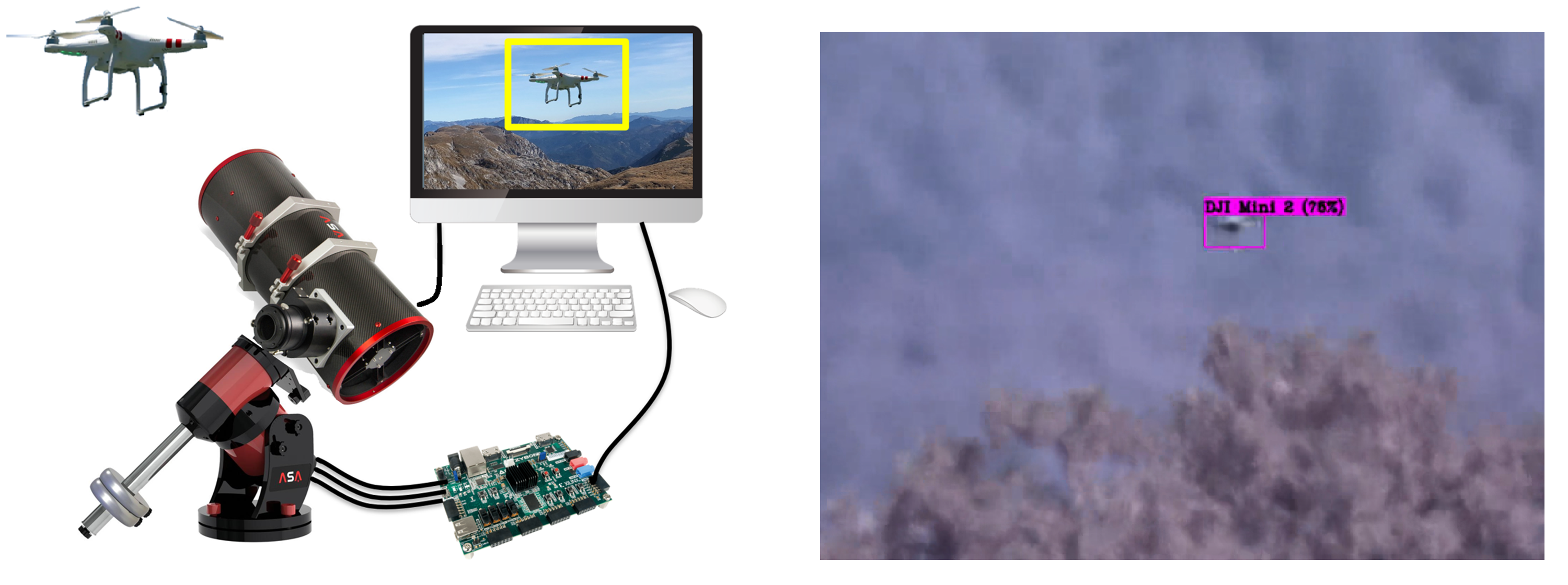
Left: Overview of OptoFence II System concept. Right: Example image captured through telescope.
The basic concept is shown in Figure 2. A suitable pair of telescopes and cameras provide high-resolution images. In the next step, these are analyzed using modern deep learning algorithms to extract the position of the UAV in the individual images. For this purpose, an efficient software architecture was implemented in the project, which enables the detection and tracking of drones at up to 100 images per second. The data obtained serves as input for advanced control technology controllers to enable the telescope to follow the flight path of the object precisely. In addition, a specially implemented automatic focus tracking system enables the drone to be kept in sharp focus. The implemented system was intensively tested during field tests under various scenarios. It was demonstrated that small drones, such as the DJI Mavic 3, can be detected and tracked up to a distance of 5 km.

OptoFence II system implementation
Use case
- UAV reconnaissance
Related Publications
- D. Ojdanić, A. Sinn, C. Naverschnigg, and G. Schitter, Feasibility Analysis of Optical UAV Detection Over Long Distances Using Robotic Telescopes, IEEE Transactions on Aerospace and Electronic Systems, vol. 59, iss. 5, pp. 5148-5157, 2023.
[BibTex] [Download]@ARTICLE{2023_ojdanic_taes, author={Ojdani{\'c}, Denis and Sinn, Andreas and Naverschnigg, Christopher and Schitter, Georg}, journal={IEEE Transactions on Aerospace and Electronic Systems}, title={Feasibility Analysis of Optical UAV Detection Over Long Distances Using Robotic Telescopes}, year={2023}, volume={59}, number={5}, pages={5148-5157}, doi={10.1109/TAES.2023.3248560}, }
- D. Ojdanić, C. Naverschnigg, A. Sinn, D. Zelinskyi, and G. Schitter, Parallel Architecture for Low Latency UAV Detection and Tracking Using Robotic Telescopes, IEEE Transactions on Aerospace and Electronic Systems, vol. 60, iss. 4, pp. 5515-5524, 2024.
[BibTex] [Download]@Article{2024_ojdanic_taes, author={Ojdanić, Denis and Naverschnigg, Christopher and Sinn, Andreas and Zelinskyi, Daniil and Schitter, Georg}, journal={IEEE Transactions on Aerospace and Electronic Systems}, title={Parallel Architecture for Low Latency UAV Detection and Tracking Using Robotic Telescopes}, year={2024}, volume={60}, number={4}, pages={5515-5524}, doi={10.1109/TAES.2024.3396418}, }
- D. Ojdanić, D. Zelinskyi, C. Naverschnigg, A. Sinn, and G. Schitter, High-speed telescope autofocus for UAV detection and tracking, Optics Express, vol. 32, iss. 5, p. 7147–7157, 2024.
[BibTex] [Download]@Article{2024_ojdanic_oe, author = {Ojdani{\'c}, Denis and Zelinskyi, Daniil and Naverschnigg, Christopher and Sinn, Andreas and Schitter, Georg}, journal = {Optics Express}, title = {High-speed telescope autofocus for UAV detection and tracking}, year = {2024}, issn = {1094-4087}, month = {02}, number = {5}, pages = {7147--7157}, volume = {32}, doi = {10.1364/oe.514859}, publisher = {Optica Publishing Group}, }
- D. Ojdanić, N. Paternoster, C. Naverschnigg, A. Sinn, and G. Schitter, Evaluation of the required optical resolution for deep learning-based long-range UAV detection, in Pattern Recognition and Tracking XXXV, 2024.
[BibTex] [Download]@InProceedings{2024_ojdanic_spie, author = {Ojdani{\'c}, Denis and Paternoster, Niklas and Naverschnigg, Christopher and Sinn, Andreas and Schitter, Georg}, booktitle = {Pattern Recognition and Tracking XXXV}, title = {Evaluation of the required optical resolution for deep learning-based long-range UAV detection}, year = {2024}, month = jun, publisher = {SPIE}, doi = {10.1117/12.3013251}, }
- D. Ojdanić, C. Naverschnigg, A. Sinn, and G. Schitter, Algorithm evaluation for parallel detection and tracking of UAVs, in Optics, Photonics, and Digital Technologies for Imaging Applications VIII, 2024.
[BibTex] [Download]@InProceedings{2024_ojdanic_spie1, author = {Ojdani{\'c}, Denis and Naverschnigg, Christopher and Sinn, Andreas and Schitter, Georg}, booktitle = {Optics, Photonics, and Digital Technologies for Imaging Applications VIII}, title = {Algorithm evaluation for parallel detection and tracking of UAVs}, year = {2024}, month = jun, publisher = {SPIE}, doi = {10.1117/12.3017037}, }
- D. Ojdanić, C. Naverschnigg, A. Sinn, and G. Schitter, Deep learning-based long-distance optical UAV detection: color versus grayscale, in Pattern Recognition and Tracking XXXIV, 2023.
[BibTex] [Download]@InProceedings{2023_ojdanic_spie, author = {Ojdani{\'c}, Denis and Naverschnigg, Christopher and Sinn, Andreas and Schitter, Georg}, booktitle = {Pattern Recognition and Tracking XXXIV}, title = {Deep learning-based long-distance optical UAV detection: color versus grayscale}, year = {2023}, month = jun, publisher = {SPIE}, doi = {10.1117/12.2663318}, }
- D. Ojdanić, B. Gräf, A. Sinn, H. W. Yoo, and G. Schitter, Camera-guided real-time laser ranging for multi-UAV distance measurement, Appl. Opt., vol. 61, iss. 31, p. 9233–9240, 2022.
[BibTex] [Download]@article{ojdanic2022AppliedOptics, author = {Denis Ojdani\'{c} and Benjamin Gr\"{a}f and Andreas Sinn and Han Woong Yoo and Georg Schitter}, journal = {Appl. Opt.}, keywords = {Laser beams; Laser light; Laser ranging; Optical components; Optical testing; Remote sensing}, number = {31}, pages = {9233--9240}, publisher = {Optica Publishing Group}, title = {Camera-guided real-time laser ranging for multi-UAV distance measurement}, volume = {61}, month = {Nov}, year = {2022}, doi = {10.1364/AO.470361}, }
- D. Ojdanic, A. Sinn, C. Schwaer, and G. Schitter, UAV Detection and Tracking with a Robotic Telescope System, in Proceedings of the Advanced Intelligent Mechatronics Conference 2021, 2021.
[BibTex]@inproceedings{TUW-299533, author = {Ojdanic, Denis and Sinn, Andreas and Schwaer, Christian and Schitter, Georg}, title = {UAV Detection and Tracking with a Robotic Telescope System}, booktitle = {Proceedings of the Advanced Intelligent Mechatronics Conference 2021}, year = {2021}, note = {Posterpr{\"a}sentation: 2021 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Delft, Netherlands; 2021-07-12 -- 2021-07-16} }
Project partners
- ASA Astrosystems GmbH
- Austrian Federal Ministry of Defence
Funding
This project is funded by the Austrian defense research programme FORTE of the Federal Ministry of Agriculture, Regions and Tourism (BMLRT).

Contact
Univ.-Prof. Dipl.-Ing. Dr.sc.techn. Georg SchitterDipl.-Ing. Andreas Sinn
Dipl.-Ing. BSc. Denis Ojdanic
Project Staff
Dipl.-Ing. BSc. Denis OjdanicDipl.-Ing. Andreas Sinn
Dipl.-Ing. BSc Christopher Naverschnigg