07.01.2022 Schnelle Trajektorienplanung für Robotersysteme unter Berücksichtigung von Hindernissen und dynamisch bewegten Zielen
Projektschwerpunkte
- Schnelle Planung und Neuplanung von Trajektorien
- Kollisionsvermeidung und bewegte Ziele
- MPC-basierte Trajektorienfolgeregelung
Beschreibung
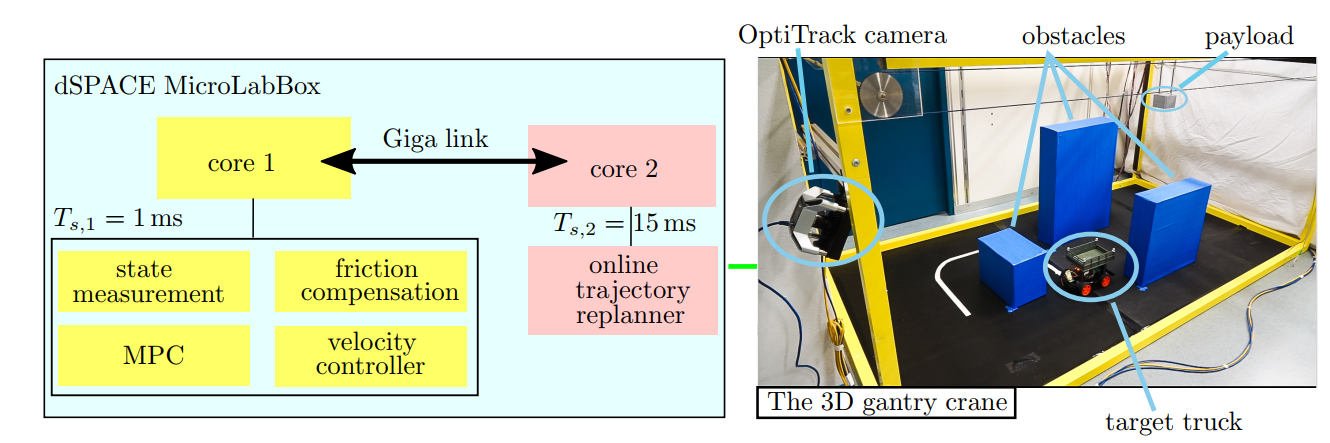
Diese Forschungsarbeit befasst sich mit der Entwicklung neuer Methoden zur schnellen Bahnplanung unter Berücksichtigung von Hindernissen und dynamisch bewegten Zielen, ein wichtiges Thema für verschiedene Anwendungen im Bereich der Robotik, Handhabungssysteme und Baumaschinen wie Kräne oder kollaborierende Roboter. Abb. 1 zeigt den Versuchsaufbau des 3D-Portalkrans im Labormaßstab. Die Aufgabe besteht darin, einen schnellen Algorithmus zur Neuplanung der Trajektorien für die Nutzlast zu implementieren, um den fahrenden LkW zu erreichen und dabei Kollisionen mit Hindernissen zu vermeiden.
Beschreibung
In dieser Forschungsarbeit werden schnelle, optimierungsbasierende Algorithmen zur Trajektorienplanung untersucht und sowohl in der Simulation als auch im Experiment umgesetzt. Da die Optimierung der Trajektorien in der Regel viel Zeit in Anspruch nimmt, ist es sinnvoll, suboptimale Lösungen als anfängliche Schätzung der Trajektorie zu verwenden und die Gesamtlösung iterativ zu verfeinern. Darüber hinaus sollte der vorgeschlagene Algorithmus in der Lage sein, eine neue Trajektorien für bewegte Ziele zu berechnen, indem er zuvor berechnete suboptimale Lösungen aus einer Datenbank verwendet. Darüber hinaus muss eine schnelle Trajektorienplanung jederzeit ausgeführt werden können, d. h. die Algorithmen können jederzeit unterbrochen werden, führen aber immer zu gültigen, wenn auch suboptimalen Ergebnissen. Dies ist eine wichtige Voraussetzung für die Echtzeitfähigkeit der entwickelten Algorithmen.
Der Schwerpunkt dieses Projekts liegt auf der effizienten Trajektorien(neu)planung, welche aus zwei Schritten besteht:
- Zunächst wird ein Offline-Trajektorienplaner implementiert, um eine Datenbank aus zeitoptimalen, kollisionsfreien und dynamisch gültigen Trajektorien aufzubauen, die alle Startpunkte aus einem vordefinierten Startraum mit allen Zielpunkten in einem Zielraum verbindet.
- Zweitens verwendet der Online-Trajektorienreplanner die Offline-Trajektoriendatenbank, um in Echtzeit eine optimale Trajektorie zu erzeugen, die die Bewegung des Ziels berücksichtigt. Der Online-Trajektorienplaner ist ein quadratisches Programm mit linearen Beschränkungen.
Zusätzlich wird ein Trajektorienverfolgungsregler entwickelt, der die dynamischen Beschränkungen für den Portalkran berücksichtigt und den möglichen Einfluss von Modellungenauigkeiten, Störungen und anderen nicht modellierten Effekten kompensiert.
Video
Ausgewählte Publikationen
- M. N. Vu, P. Zips, A. Lobe, F. Beck, W. Kemmetmüller, and A. Kugi, Fast motion planning for a laboratory 3D gantry crane in the presence of obstacles, in Proceedings of the 21st IFAC World Congress, Berlin, Germany, 2020, p. 9508–9514.
[BibTex]@InProceedings{Vu2020, author = {Vu, M.N. and Zips, P. and Lobe, A. and Beck, F. and Kemmetmüller, W. and Kugi, A.}, booktitle = {Proceedings of the 21st IFAC World Congress}, title = {Fast motion planning for a laboratory 3D gantry crane in the presence of obstacles}, doi = {10.1016/j.ifacol.2020.12.2427}, note = {IFAC-PapersOnLine}, number = {2}, pages = {9508--9514}, volume = {53}, address = {Berlin, Germany}, issn = {2405-8963}, month = {06}, year = {2020}, }
28.10.2021 Optimale TCP- und Roboterpositionierung für komplexe kontinuerliche Pfade
Projektfokus
- Berechnung des optimalen TCP (tool center point) für einen Industrieroboter
- Formulierung eines Gütekriteriums und Optimierung
- Entwicklung einer schnellen unterlagerten Pfadplanung
Beschreibung
Der Roboterstandort eines Industrieroboters relativ zu einem Werkstück ist entscheidend für die Durchführbarkeit der geforderten Roboterbewegungen. Dieser wird zumeist bei der Planung einer Roboterzelle einmalig gewählt. In einem flexiblen Produktionssystem werden jedoch Robotertrajektorien häufig geändert, wodurch eine teure und zeitaufwändige Neupositionierung des Roboters notwendig werden kann. In dieser Arbeit wird gezeigt, wie mit Hilfe eines angepassten Werkzeugs eine Neupositionierung des Roboters verhindert werden kann.
Zu diesem Zweck wird eine schnelle unterlagerte Pfadplanung entwickelt. Diese Pfadplanung berücksichtigt große zulässige Verfahrwege der Roboterachsen sowie Bewegungen durch Singularitäten. Mit Hilfe dieser Pfadplanung wird ein Optimierungsproblem formuliert, die den optimalen TCP für eine Menge von unterschiedlichen Endeffektor-Pfaden berechnet. Für dieses Optimierungsproblem wird ein Gütekriterium verwendet, das die Anzahl von invers-kinematischen Lösungen, die Anzahl von kontinuierlichen Lösungen sowie die Achsbewegungen und Reserven zu Achswinkelbegrenzungen berücksichtigt. Weiters wird gezeigt, dass dieser Algorithmus durch Umformulierung ebenfalls zur Berechnung des optimalen Roboterstandorts verwendet werden kann. Der Algorithmus wird anhand eines Schneidprozesses demonstriert, für welchen der optimale TCP und der optimale Roboterstandort berechnet wird.
Videos
Ausgewählte Publikationen
- T. Weingartshofer, C. Hartl-Nesic, and A. Kugi, Optimal TCP and Robot Base Placement for a Set of Complex Continuous Paths, in Proceedings of the International Conference on Robotics and Automation (ICRA), Xi’an, China, 2021, pp. 9659-9665.
[BibTex]@InProceedings{Weingartshofer2021, author = {Weingartshofer, T. and Hartl-Nesic, C. and Kugi, A.}, booktitle = {Proceedings of the International Conference on Robotics and Automation (ICRA)}, title = {Optimal TCP and Robot Base Placement for a Set of Complex Continuous Paths}, doi = {10.1109/ICRA48506.2021.9561900}, pages = {9659 - 9665}, address = {Xi'an, China}, issn = {2577-087X}, month = {5}, year = {2021}, }
22.10.2021 Beobachterbasierte iterativ lernende Regelung zur Verbesserung der Bahngenauigkeit von Industrierobotern
Projektfokus
- Modellbildung von nichtlinearen Effekten in Antriebssträngen von Robotern
- Entwurf von hochgenauen, modellbasierten Zustandsbeobachtern
- Iterativ Lernende Regelung zur Verbesserung der Bahngenauigkeit am Endeffektor
Beschreibung
Für Bearbeitungsaufgaben mit Robotern ist die Bahngenauigkeit ein wesentliches Leistungskriterium. Bei vielen Anwendungen sind Genauigkeiten im Bereich von Zehntelmillimeter und darunter gefordert. Beispiele dafür sind das Nahtabdichten von Autokarossen mit Robotern und das Laserschweißen. Bei diesen Anwendungen kommt es nicht nur auf eine hohe statische Genauigkeit an, sondern auf die Gesamtgenauigkeit, bei der auch Schleppfehler der Regelung, sowie dynamische Effekte der Mechanik enthalten sind. In Abbildung 1 wird der Schleppfehler beim Lasermarkieren dargestellt.
Eine wesentliche Ursache für die oben gezeigten Abweichung vom Idealverhalten liegen in den Antriebssträngen. Dabei haben die Getriebe den wichtigsten Einfluss. Gegenüber dem idealen Verhalten weisen Getriebe folgende Abweichungen auf:
- Ungleichmäßige Reibung: durch den variierenden Eingriff der Getriebeverzahnung ist die Reibung stellungsabhängig und lastabhängig.
- Nicht konstantes Übersetzungsverhältnis: durch nicht perfekte Zahnflanken kommt es zu kleinen Schwankungen in der Endeffektorposition. Bei Robotern im Bereich von 1-3 Metern Armlänge kann dies TCP (Tool Center Point)-Fehler im Bereich von einigen Zehntel Millimetern hervorrufen.
- Endliche und variable Steifigkeit: durch die Nachgiebigkeit des Getriebes kommt es in Wechselwirkung mit Reibung und Übersetzungsverhalten zu Schwingungsanregungen. Wenn die Frequenz der variablen Einflussgrößen mit der Resonanzfrequenz der Roboterachse übereinstimmt, kann dies zu massiven dynamischen Fehlern führen.
Die Getriebeeffekte sind vor allem in ihrer dynamischen Wechselwirkung komplex. Messverfahren erfordern meist hochpreisige Messgeräte. Jeder Roboter, für den eine Kompensation eingesetzt werden soll, muss individuell vermessen werden.

Ziel des Projektes ist es, geeignete Robotermodelle und Zustandsbeobachter zu entwickeln, welche die oben beschriebenen Getriebeeffekte beinhalten. Darauf aufbauend sollen neue Regelungsstrategien entworfen werden, mit denen die wachsenden Genauigkeitsanforderungen erreicht werden können. Dabei geht es vor allem auch darum, mechatronische, physikalische Modelle optimal mit der Verarbeitung unstrukturierter Daten zu kombinieren, um eine möglichst hohe Effizienz und einfache Anwendbarkeit zu erreichen. Um weiters auf die Verfügbarkeit von hochgenauen Messsystemen in der Praxis einzugehen, werden kostengünstig verfügbare Sensoren verwendet, um eine breite Anwendbarkeit der entwickelten Methoden zu garantieren. Die so gewonnen Messdaten werden im Zuge einer iterativ lernenden Regelung verwendet, um letztendlich die gewünschte Genauigkeit, nicht nur bei der Positionierung, sondern auch beim Durchfahren von Bahnen zu erreichen.
Ausgewählte Publikationen
- B. Bischof, T. Glück, M. Böck, and A. Kugi, Path Following Control for Elastic Joint Robots, in Proceedings of the 20th IFAC World Congress, Toulouse, France, 2017, p. 4806–4811.
[BibTex]@InProceedings{Bischof17, author = {Bischof, B. and Gl\"uck, T. and B\"ock, M. and Kugi, A.}, title = {Path Following Control for Elastic Joint Robots}, booktitle = {Proceedings of the 20th IFAC World Congress}, year = {2017}, volume = {50}, number = {1}, month = {7}, pages = {4806--4811}, doi = {10.1016/j.ifacol.2017.08.965}, address = {Toulouse, France}, issn = {2405-8963}, } - B. Bischof, Path and Surface Following Control for Industrial Robotic Applications, A. Kugi and K. Schlacher, Eds., Aachen: Shaker Verlag, 2020, vol. 47.
[BibTex]@Book{Bischof2020, author = {Bischof, Bernhard}, title = {{Path and Surface Following Control for Industrial Robotic Applications}}, year = {2020}, editor = {A. Kugi and K. Schlacher}, volume = {47}, series = {Modellierung und Regelung komplexer dynamischer Systeme}, publisher = {Shaker Verlag}, isbn = {978-3-8440-7200-6}, address = {Aachen}, organization = {Institute f{\"u}r Automatisierungs- und Regelungstechnik (TU Wien) und Regelungstechnik und Prozessautomatisierung (JKU Linz)}, }
13.10.2021 Regelungsstrategien für hoch-energetische gepulste Laserquellen
Projektschwerpunkte
- Mathematische Modellierung und Analyse auftretender Dynamiken im Laser
- Entwicklung modellbasierter adaptiver Pulsformungsalgorithmen
- Unterdrückung dynamischer Instabilitäten und stochastischer Fluktuationen durch Regelungsmethoden
- Ausloten des Potentials von integriertem Hardware/Software Codesigns für gepulste Laserquellen
Beschreibung
Kurze hochenergetische Laserpulse sind zu einem wertvollen und flexiblen Werkzeug mit Anwendungen von physikalischer und chemischer Grundlagenforschung (beispielsweise in der Hochenergiephysik, zum Pumpen optisch-parametrischer Verstärker und Freie-Elektronen-Laser, zur kohärenten Stimulation von atomarer und molekularer Prozesse) bis hin zur ablationsbasierten Materialbearbeitung und Augenchirurgie geworden. Die Erzeugung besonders kurzer Laserpulse geschieht dabei durch Injektion eines Quellpulses eines Oszillators (z.B. eines Mode-Locked-Lasers) in einen Resonator mit gepumptem Lasermedium – ein sogenanntes Master Oscillator Power Amplifier (MOPA) Konzept. Genügen auch etwas längere Pulsdauern, wird typischerweise gänzlich auf Quellpulse verzichtet und der Aufbau von optischer Energie im Resonator wird durch stochastische Zerfallsprozesse zufolge spontaner Emission selbsttätig angetrieben – wie in klassischen gütegeschalteten Lasern.
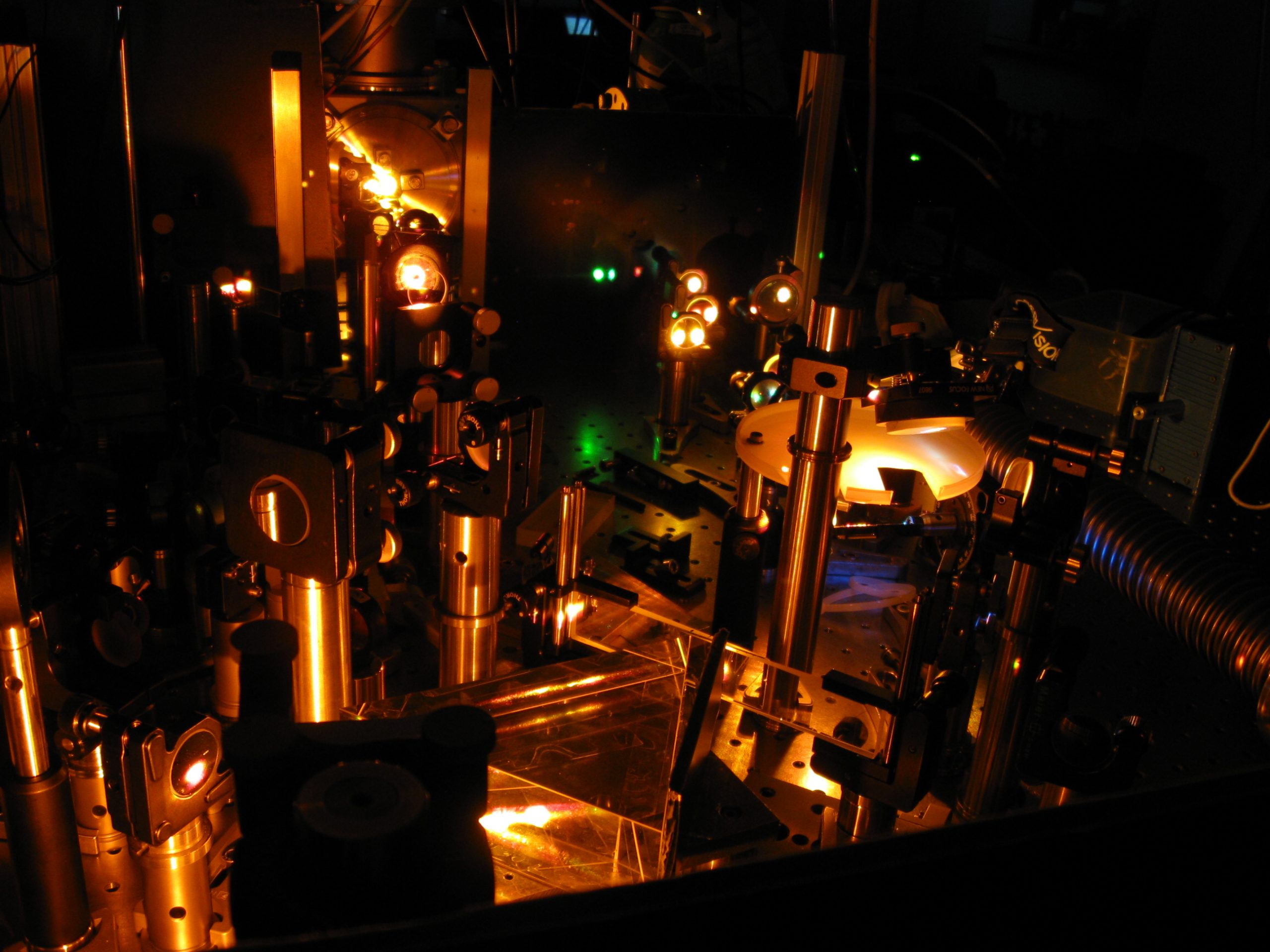
Experimentelles gepulses Lasersystem am Institut für Photonik an der TU Wien.
Viele zukunftsträchtige Anwendungsgebiete von gepulstem Laserlicht bedingen einen Betrieb der Laserquellen in zunehmend extremen und herausfordernden Betriebszuständen mit spezifischen Herausforderungen. Beispielsweise profitieren Oberflächenuntersuchungen und spektroskopische Anwendungen von hohen Pulswiederholraten, welche nahe oder innerhalb des instabilen Betriebsbereichs von gepumpten Resonatoren liegen. Dies ist besonders relevant wenn mehrstufige Verstärkerkaskaden auf Platz- und Kostengründen für die intendierte Anwendung nicht sinnvoll sind. Zusätzlich verhindern starke stochastische Energiefluktuationen zufolge spontaner Emission in gütegeschalteten Resonatoren den Einsatz in Messanwendungen. Die benötigten Bandbreiten für ultra-kurze Laserpulse deformieren den Laserpuls zudem stark, was zu zeitlich starken verbreiteten Ausgangspulsen führt.
Die notwendige Steuerungshardware in modernen Pulsquellen basiert weitgehend auf elektronisch programmierbaren optischen Aktuatoren wie beispielsweise akusto-optischen Modulatoren (AOMs) oder sog. spatial light modulators (SLMs). Dies legt die Verwendung regelungstechnischer Methoden nahe, um obige Effekte zu vermindern oder vollständig zu eliminieren. Insbesondere ermöglicht die systematische Einbeziehung von Regelungskonzepten während des optischen Laserdesigns die Entwicklung effizienterer, ökonomischerer und flexiblerer Lasersysteme.
Ausgewählte Publikationen
- A. Deutschmann-Olek, K. Schrom, and A. Kugi, Control of the formation and amplification of pulse bursts in regenerative amplifiers, IET Control Theory & Applications, vol. 17, iss. 4, p. 419–432, 2023.
[BibTex] [Download]@Article{DeutschmannOlek2023, author = {Deutschmann-Olek, Andreas and Schrom, Katharina and Kugi, Andreas}, title = {Control of the formation and amplification of pulse bursts in regenerative amplifiers}, doi = {10.1049/cth2.12378}, number = {4}, pages = {419--432}, volume = {17}, journal = {IET Control Theory \& Applications}, year = {2023}, } - L. Tarra, A. Deutschmann-Olek, and A. Kugi, Nonlinear feedback stabilisation and stochastic disturbance suppression of actively Q-switched lasers, in Proceedings of the 22nd IFAC World Congress, Yokohama, Japan, 2023 2023, pp. 77-82.
[BibTex]@InProceedings{Tarra2023, author = {Tarra, L. and Deutschmann-Olek, A. and Kugi, A.}, booktitle = {Proceedings of the 22nd IFAC World Congress}, date = {2023}, title = {Nonlinear feedback stabilisation and stochastic disturbance suppression of actively Q-switched lasers}, doi = {10.1016/j.ifacol.2023.10.1550}, number = {2}, pages = {77-82}, volume = {56}, address = {Yokohama, Japan}, issue = {2}, journaltitle = {IFAC-PapersOnLine}, month = {7}, year = {2023}, } - L. Tarra, A. Deutschmann-Olek, V. Stummer, T. Flöry, A. Baltuska, and A. Kugi, Stochastic nonlinear model of the dynamics of actively Q-switched lasers, Optics Express, vol. 30, iss. 18, p. 32411–32427, 2022.
[BibTex]@Article{Tarra2022, author = {Lukas Tarra and Andreas Deutschmann-Olek and Vinzenz Stummer and Tobias Fl\"{o}ry and Anrius Baltuska and Andreas Kugi}, title = {Stochastic nonlinear model of the dynamics of actively Q-switched lasers}, doi = {10.1364/OE.464508}, number = {18}, pages = {32411--32427}, url = {http://opg.optica.org/oe/abstract.cfm?URI=oe-30-18-32411}, volume = {30}, journal = {Optics Express}, keywords = {Amplified spontaneous emission; Fiber lasers; Q switched lasers; Random lasers; Spontaneous emission; Stimulated Brillouin scattering}, month = {Aug}, publisher = {Optica Publishing Group}, year = {2022}, } - A. Deutschmann, W. Kemmetmüller, and A. Kugi, On the global feedback stabilization of regenerative optical amplifiers, in Proceedings of the 21st IFAC World Congress, Berlin, Germany, 2020, p. 5447–5452.
[BibTex]@InProceedings{Deutschmann2020a, author = {A. Deutschmann and W. Kemmetmüller and A. Kugi}, booktitle = {Proceedings of the 21st IFAC World Congress}, title = {On the global feedback stabilization of regenerative optical amplifiers}, doi = {10.1016/j.ifacol.2020.12.1547}, note = {IFAC-PapersOnLine}, number = {2}, pages = {5447--5452}, volume = {53}, address = {Berlin, Germany}, issn = {2405-8963}, month = {06}, year = {2020}, } - A. Deutschmann, T. Flöry, K. Schrom, V. Stummer, A. Baltuška, and A. Kugi, Bifurcation suppression in regenerative amplifiers by active feedback methods, Optics Express, vol. 28, iss. 2, pp. 1722-1737, 2020.
[BibTex] [Download]@Article{Deutschmann2020, author = {Deutschmann, A. and Fl\"ory, T. and Schrom, K. and Stummer, V. and Baltu\v{s}ka, A. and Kugi, A.}, title = {Bifurcation suppression in regenerative amplifiers by active feedback methods}, journal = {Optics Express}, year = {2020}, volume = {28}, number = {2}, pages = {1722-1737}, doi = {10.1364/OE.380404}, } - A. Deutschmann, P. Malevich, A. Baltuska, and A. Kugi, Modeling and iterative pulse-shape control of optical chirped pulse amplifiers, Automatica, vol. 98, p. 150–158, 2018.
[BibTex] [Download]@Article{Deutschmann2018a, author = {Deutschmann, A. and Malevich, P. and Baltuska, A. and Kugi, A.}, title = {Modeling and iterative pulse-shape control of optical chirped pulse amplifiers}, journal = {Automatica}, year = {2018}, volume = {98}, pages = {150--158}, issn = {0005-1098}, doi = {10.1016/j.automatica.2018.09.002}, }
Partner
Ultrafast Laser Group, Institut für Photonik an der Technischen Universität Wien
29.06.2021 Zeitoptimaler Aufbau einer mobilen Betonpumpe
Projektbeschreibung
Betonpumpen werden auf Baustellen eingesetzt um Beton vom Mischfahrzeug zur Schalung zu transportieren. Sie bestehen im Wesentlichen aus einer Pumpe sowie einem Ausleger mit der darauf angebrachten Betonleitung, siehe Abb. 1. Um große Reichweiten zu erzielen (bis ca. 60 m) und gleichzeitig den Transport auf einem LKW zu ermöglichen, zeichnen sich die Ausleger von Betonpumpen durch einen ausgeprägten Leichtbau aus. Durch die komplexe Kinematik mit bis zu 6 unabhängigek Gelenken und der großen Arbeitsräume ist ein optimaler, manueller Betrieb vom Menschen kognitiv unmöglich.

Einsatz der Betonpumpe auf einer Baustelle.
Im Stand der Technik werden die Verfahrgeschwindigkeiten von solchen Auslegersystemen stark eingeschränkt um die Sicherheit zu gewährleisten und die Aus- und Einfaltbewegung erfolgt schrittweise bei gleichzeitiger Bewegung von maximal 2-3 Gelenken. Weiterhin erfordert die Bedienung einer Betonpumpe erfahrenes Bedienpersonal. Die Entwicklungen im Off-Highway Bereich der letzten Jahre zeigen einen deutlichen Zuwachs an immer komplexer werdenden Assistenz- und Sicherheitssystemen, die das Bedienpersonal bei der Arbeit aktiv im Hinblick auf verbesserten Bedienkomfort unterstützen und eine erhöhte Sicherheit automatisierter Prozesse ermöglichen.
Projektschwerpunkte
Im Rahmen des Forschungsprojektes wurde ein System entwickelt um zeitoptimale, kollisionsfreie Bewegungen für den Ausleger der Betonpumpe zu berechnen. Die berechneten Bewegungen berücksichtigen neben den technischen Beschränkungen der Gelenkswinkel und Gelenkswinkelgeschwindigkeiten ebenfalls gesetzliche Rahmenbedingungen im Sinne maximaler kartesischer Geschwindigkeiten systematisch. Weiters wird im Falle einer nicht vollständigen Abstützung mit Hilfe der Stützbeinen (z.B. aufgrund von mangelndem Platz an der Baustelle), der Arbeitsbereich der Maschine systematisch beschränkt. Das entwickelte Konzept wurde an einer realen Maschine mit 5 unabhängigen Drehgelenken validiert.
Ausgewählte Publikationen
- J. Henikl, W. Kemmetmüller, and A. Kugi, Estimation and control of the tool center point of a mobile concrete pump, Automation in Construction, vol. 61, p. 112–123, 2016.
[BibTex] [Download]@Article{Henikl16, Title = {Estimation and control of the tool center point of a mobile concrete pump}, Author = {Henikl, J. and Kemmetm\"uller, W. and Kugi, A.}, Journal = {Automation in Construction}, Pages = {112--123}, Volume = {61}, Year = {2016}, Doi = {10.1016/j.autcon.2015.10.005}, ISSN = {0926-5805}, } - J. Henikl, W. Kemmetmüller, T. Meurer, and A. Kugi, Infinite-dimensional decentralized damping control of large-scale manipulators with hydraulic actuation, Automatica, vol. 63, p. 101–115, 2016.
[BibTex] [Download]@Article{Henikl16a, Title = {Infinite-dimensional decentralized damping control of large-scale manipulators with hydraulic actuation}, Author = {Henikl, J. and Kemmetm\"uller, W. and Meurer, T. and Kugi, A.}, Journal = {Automatica}, Pages = {101--115}, Volume = {63}, Year = {2016}, Doi = {10.1016/j.automatica.2015.10.024}, ISSN = {0005-1098}, } - J. Henikl, W. Kemmetmüller, M. Bader, and A. Kugi, Modeling, Simulation and Identification of a Mobile Concrete Pump, Mathematical and Computer Modelling of Dynamical Systems, vol. 21, iss. 2, p. 180–201, 2015.
[BibTex] [Download]@Article{Henikl14, Title = {Modeling, Simulation and Identification of a Mobile Concrete Pump}, Author = {Henikl, J. and Kemmetm\"uller, W. and Bader, M. and Kugi, A.}, Journal = {Mathematical and Computer Modelling of Dynamical Systems}, Pages = {180--201}, Volume = {21}, Year = {2015}, Number = {2}, Doi = {10.1080/13873954.2014.926277}, } - M. Meiringer, A. Kugi, and K. W., Time-optimal fold out of large-scale manipulators with obstacle avoidance, in Proceedings of the 11th IFAC Symposium on Nonlinear Control Systems NOLCOS 2019, Vienna, Austria, 2019, pp. 114-119.
[BibTex]@InProceedings{Meiringer2019, author = {Meiringer, M. and Kugi, A. and Kemmetm\"uller W.}, title = {Time-optimal fold out of large-scale manipulators with obstacle avoidance}, booktitle = {Proceedings of the 11th IFAC Symposium on Nonlinear Control Systems NOLCOS 2019}, year = {2019}, volume = {52}, number = {16}, month = {9}, pages = {114-119}, doi = {10.1016/j.ifacol.2019.11.765}, address = {Vienna, Austria}, issn = {2405-8963}, } - W. Kemmetmüller, M. Meiringer, V. Platzgummer, and A. Kugi, Optimale Abstützung eines mobilen Großraummanipulators, at – Automatisierungstechnik, vol. 69, iss. 9, p. 782–794, 2021.
[BibTex]@Article{Kemmetmueller2021, author = {Wolfgang Kemmetmüller and Martin Meiringer and Valentin Platzgummer and Andreas Kugi}, title = {Optimale Abstützung eines mobilen Großraummanipulators}, doi = {doi:10.1515/auto-2021-0052}, number = {9}, pages = {782--794}, url = {https://doi.org/10.1515/auto-2021-0052}, volume = {69}, journal = {at -- Automatisierungstechnik}, year = {2021}, } - M. Meiringer, A. Kugi, and W. Kemmetmüller, Modelling and calibration of a five link elastic boom of a mobile concrete pump, Mathematical and Computer Modelling of Dynamical Systems, vol. 29, iss. 1, p. 41–68, 2023.
[BibTex] [Download]@Article{Meiringer2023, author = {M. Meiringer and A. Kugi and W. Kemmetm\"uller}, title = {Modelling and calibration of a five link elastic boom of a mobile concrete pump}, doi = {10.1080/13873954.2023.2177311}, number = {1}, pages = {41--68}, volume = {29}, journal = {Mathematical and Computer Modelling of Dynamical Systems}, year = {2023}, } - M. Meiringer, A. Kugi, and W. Kemmetmüller, Semi-autonomous operation of a mobile concrete pump, Automation in Construction, vol. 156, p. 105079, 2023.
[BibTex]@Article{Meiringer2023a, author = {Meiringer, M. and Kugi, A. and Kemmetm\"uller, W.}, title = {Semi-autonomous operation of a mobile concrete pump}, doi = {10.1016/j.autcon.2023.105079}, pages = {105079}, volume = {156}, journal = {Automation in Construction}, year = {2023}, }
08.03.2021 Digital Literacy in Robotics & Informatics – for underprivileged people
Robotik und Informatik sind ohne digitale Kompetenz nicht denkbar. Beide sind ein möglicher Einstieg in die digitale Welt und fördern die Entwicklung der digitalen Kompetenz. Es stellt sich aber auch die Frage, welche Barrieren im digitalen Raum entstehen und wie diese überwunden werden können. Dazu wird eine Arbeitsgruppe mit interdisziplinären Mitgliedern aus unterschiedlichen Partneruniversitäten gegründet, die gemeinsame Barrieren sichtbar machen und Verbesserungen für gendergerechte didaktische Konzepte und Produktentwicklung vorschlagen.
Partners:
TU Wien ACIN Institut für Automatisierungs- und Regelungstechnik
TU Wien Department of Geodesy Geoinformation
FH Technikum Wien Digital Manufacturing & Robotics
FH Technikum Wien Informatik
Universität Wien, Institut für Bildungswissenschaften
Funding:
Dieses Projekt wird von CTS der TU Wien mit der Projektnummer GEV376020CTS finanziert.
08.10.2020 Modellierung und optimale Regelung eines Langstatorlinearmotors
Projektschwerpunkte
- Modellierung des Linearmotors
- Optimale Strommuster für unterschiedliche Betriebsszenarien
- Entwicklung eines Regelungskonzepts zur Positionsregelung einer oder mehrerer Transporteinheiten
Beschreibung
Die Verwendung von Langstatorlinearmotoren stellt für Produktionsanlagen ein flexibleres Transportsystem dar als vergleichsweise Förderbandanlagen. Die Bestückung mit mehreren Transporteinheiten bietet neben besseren Wartungsmöglichkeiten den Vorteil, dass die Abstände und somit die Laufzeiten der Transportprozesse variabel gestaltet werden können. Um einen hochdynamischen Betrieb zu ermöglichen ist ein detailliertes Modellwissen sowie eine ausgereifte Regelungsstrategie notwendig.
B&R Industrial Automation GmbH
Bei der Beschreibung von elektrischen Motoren ist zum einen die nichtlineare Materialsättigung des Statormaterials sowie eine ausgeprägte Reluktanzkraft eine besondere Problematik. Die gewählte Methode der Beschreibung mittels Reluktanznetzwerken erlaubt eine systematische Herleitung eines Motormodells unter Berücksichtigung der genannten Phänomene. Auf Basis dieses Modells werden Optimierungsprobleme formuliert, die eine optimale Bestromung der einzelnen Motorspulen unter der Vorgabe von Antriebs- sowie Normalkräften, welche auf die Transporteinheiten wirken sollen, errechnen. Zusätzlich werden die optimalen Strommuster durch Effizienzvorgaben beschränkt. Die Positionierung einer bzw. mehrerer Transporteinheiten erfolgt unter Verwendung dieser optimalen Strommuster. Dabei ergibt sich die Herausforderung, dass die Positioniergenauigkeit bei dicht geführten Transporteinheiten bestehen bleibt.
Projektpartner
B&R Industrial Automation GmbH
21.02.2020 Robotisches Bekleben von 3D-Objekten
Projektfokus
- Aufkleben von zugeschnittenen Klebebändern auf Freiform-3D-Oberflächen
- Drapieren mit einer definierten Normalkraft
- Roboterwerkzeug entlang eines Oberflächenpfades auf einer Freiform-3D-Oberfläche führen
Beschreibung
Die robotische Handhabung von formlabilen Materialen, wie z.B. Textilien, Karbon- und Glasfaserstoffe, Folien und Papier, ist seit langem eine herausfordernde Aufgabe in der Industrie und das wissenschaftliche Interesse
Robotische Handhabung von formlabilen Materialien wie z. B. Textilien, Karbon- und Glasfasergewebe, Folien und Papier ist seit langem eine herausfordernde Aufgabe in der Industrie und haben in jüngster Zeit große Aufmerksamkeit in der Forschung erhalten. Eine flexible Automatisierung auf menschlichem Niveau wurde für viele Handhabungsaufgaben noch nicht erreicht, wie z.B. das Greifen, Abstapeln und Drapieren. Die Hauptherausforderungen für automatisierte Handhabung von formlabilen Materialien sind ihre Eigenschaften, insbesondere das nichtlineare Materialverhalten, die Anisotropie, die vielseitigen Außenkonturen, die hohe Dimension des Objektzustands und die Vielzahl von Materialparametern wie Porosität und Dichte. In diesem Zusammenhang wurden viele spezialisierte mechatronische Lösungen zum Greifen und Transportieren implementiert. Die Industrie benötigt jedoch für die hohe Vielfalt und geringe Stückzahl flexiblere Lösungen.
In diesem Projekt wird ein flexibler Ansatz für das impedanzgeregelte faltenfreie Aufkleben von zugeschnittenen Klebebändern auf 3D-Freiformflächen vorgestellt. Für diese Anwendung wird ein Konzept für eine oberflächenbasierte Pfadfolgeregelung entwickelt, das auf einem lokalen Koordinatensystem aufbaut, basierend auf der Oberflächennormalen und der Pfadtangente. Darüber hinaus stellen die Algorithmen und Lösungen, die aus dieser Anwendung hervorgehen, auch eine Lösung für ein allgemeineres Problem in der Robotik dar: das Durchlaufen eines Werkzeugs entlang eines gekrümmten Pfades auf einer 3D-Freiformoberfläche mit definierten kinematischen Einschränkungen.
Der Aufklebeprozess besteht aus den folgenden Schritten und ist in Abb. 1 dargestellt:
- (a) 2D-Pfad für das Klebeband: Ein planarer Pfad wird auf der Form des planaren Klebebandes erstellt.
- (b) Übertragen auf das 3D-Objekt: Die Geometrie und Krümmung des planaren Pfades wird auf das CAD-Modell des 3D-Objekts abgebildet, wodurch ein 3D-Pfad erstellt wird.
- (c) Startposition des Roboters: Der Aufklebeprozess wird simuliert, um eine geeignete Startgelenkkonfiguration für den Roboter zu bestimmen, die zu einer kollisionsfreien Ausführung führt und eine angemessene Reserve in Bezug auf die Gelenkgrenzen aufweist.
- (d) Vorbereitung und Ausführung: Das vorgeschnittene Klebeband wird in der erforderlichen Startposition dem Applikationswerkzeug platziert und der Roboter führt den impedanzgesteuerten Aufklebeprozess durch.
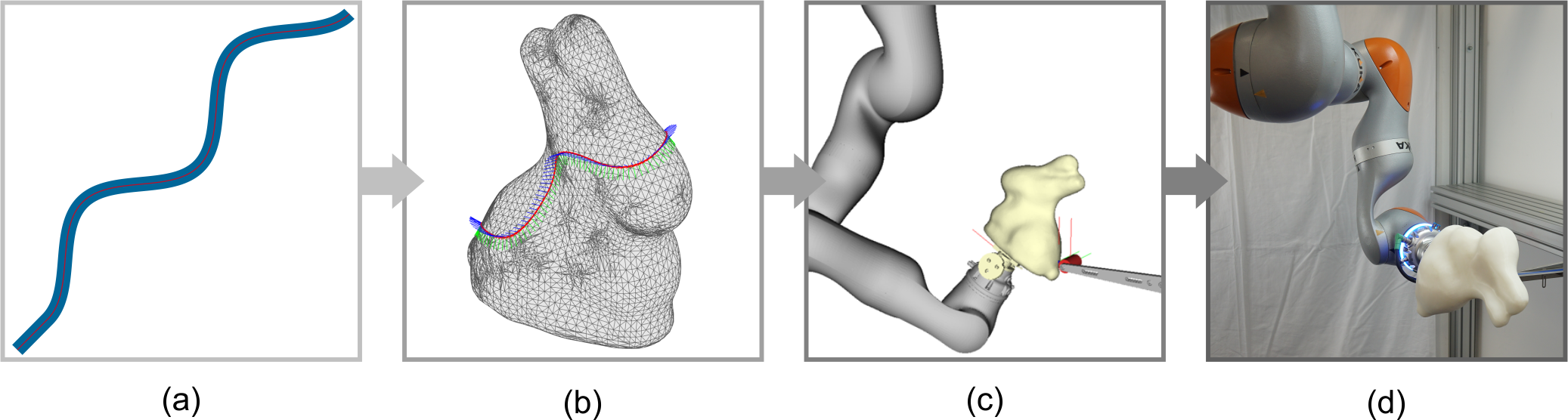
Aufklebeprozess im Überblick: (a) 2D-Pfad für das Klebeband, (b) Übertragen auf das 3D-Objekt, (c) Startposition des Roboters, (d) Vorbereitung und Ausführung.
Das oberflächenbasierte Konzept der Pfadfolgeregelung wird an einem 3D-gedruckten Objekt demonstriert, wie in Fig. 2 gezeigt: Die Pfade der zugeschnittenen Klebebänder in (a) werden auf die Oberfläche des 3D-Objekts in (b) übertragen. Das Ergebnis des Aufklebeprozesses ist in (c) dargestellt.
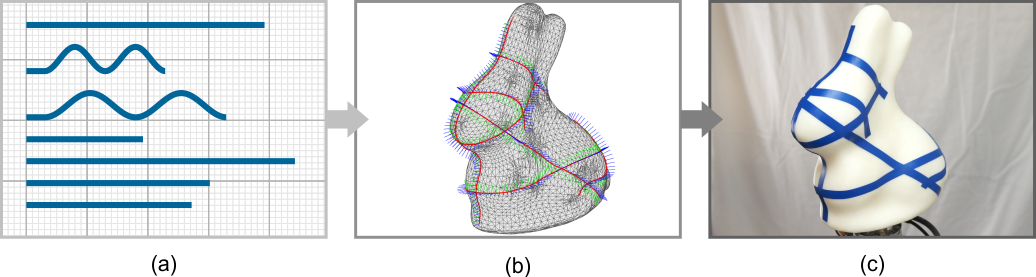
Experimentelle Ergebnisse für den Aufklebeprozess auf einem 3D-gedruckten Objekt: (a) Zugeschnittene Klebebänder (b) Übertragene 3D-Pfade auf das Objekt (c) Fertiggestelltes 3D-Objekt
Videos
Ausgewählte Publikationen
- T. Weingartshofer, M. Schwegel, C. Hartl-Nesic, T. Glück, and A. Kugi, Collaborative Synchronization of a 7-Axis Robot, in Proceedings of the 8th IFAC Symposium on Mechatronic Systems MECHATRONICS 2019, Vienna, Austria, 2019, pp. 507-512.
[BibTex]@InProceedings{Weingartshofer2019, author = {Weingartshofer, T. and Schwegel, M. and Hartl-Nesic, C. and Gl\"uck, T. and Kugi, A.}, title = {Collaborative Synchronization of a 7-Axis Robot}, booktitle = {Proceedings of the 8th IFAC Symposium on Mechatronic Systems MECHATRONICS 2019}, year = {2019}, volume = {52}, number = {15}, month = {9}, pages = {507-512}, doi = {10.1016/j.ifacol.2019.11.726}, address = {Vienna, Austria}, issn = {2405-8963}, } - C. Hartl-Nesic, B. Bischof, T. Glück, and A. Kugi, Pfadfolgeregelung mit Konzepten für den Pfadfortschritt: Ein Assemblierungsszenario, at – Automatisierungstechnik, vol. 68, iss. 1, p. 44–57, 2020.
[BibTex]@Article{Hartl-Nesic2020, author = {Hartl-Nesic, Christian and Bischof, Bernhard and Gl{\"u}ck, Tobias and Kugi, Andreas}, title = {Pfadfolgeregelung mit Konzepten für den Pfadfortschritt: Ein Assemblierungsszenario}, journal = {at -- Automatisierungstechnik}, year = {2020}, volume = {68}, number = {1}, pages = {44--57}, issn = {2196-677X}, doi = {10.1515/auto-2019-0114}, } - C. Hartl-Nesic, Surface-Based Path Following Control on Freeform 3D Objects, A. Kugi, K. Schlacher, and W. Kemmetmüller, Eds., Düren: Shaker Verlag, 2020, vol. 49.
[BibTex]@Book{HartlNesic2020, author = {Hartl-Nesic, C.}, title = {Surface-Based Path Following Control on Freeform 3D Objects}, editor = {A. Kugi and K. Schlacher and W. Kemmetm\"uller}, isbn = {978-3-8440-7637-0}, publisher = {Shaker Verlag}, series = {Modellierung und Regelung komplexer dynamischer Systeme}, volume = {49}, address = {D\"uren}, organization = {Institute f{\"u}r Automatisierungs- und Regelungstechnik (TU Wien) und Regelungstechnik und Prozessautomatisierung (JKU Linz)}, year = {2020}, } - C. Hartl-Nesic, T. Glück, and A. Kugi, Surface-Based Path Following Control: Application of Curved Tapes on 3-D Objects, IEEE Transactions on Robotics, vol. 37, iss. 2, p. 615–626, 2021.
[BibTex] [Download]@Article{HartlNesic2021, author = {Hartl-Nesic, Ch. and Gl{\"u}ck, T. and Kugi, A.}, title = {Surface-Based Path Following Control: Application of Curved Tapes on 3-D Objects}, doi = {10.1109/TRO.2020.3033721}, issn = {1552-3098}, number = {2}, pages = {615--626}, volume = {37}, journal = {IEEE Transactions on Robotics}, year = {2021}, }
Anwendungen
- Textil- und Bekleidungsindustrie
- Faserverstärkte Bauteile
- Lebensmittelindustrie
22.01.2020 Modellierung, Optimierung und Qualitätsmonitoring für das Besäumen von Grobblechen
Projektschwerpunkte
- Untersuchung und Modellierung des Besäumprozesses von Grobblechen
- Optimierung des Prozesses und der Anlagenkonstruktion
- Ursachenforschung und Minimierung von Qualitätsmängeln
- Entwicklung eines kamera- und laserbasierten Systems zum Qualitätsmonitoring
Beschreibung
In der Metallindustrie bezeichnet Besäumen das möglichst rechteckige Zuschneiden von Grobblechen nach dem Walzvorgang. Rollschnittscheren (siehe Abb. 1) bewerkstelligen diese Aufgabe schrittweise und rein mechanisch mit rollenden Messern. Aufgrund der Blechdicken von bis zu 45mm entstehen dabei Prozesskräfte bis zu 5MN. Trotz der weiten Verbreitung von Besäumscheren treten häufig Qualitätsmängel an den Schnittkanten wie Ausbrüche, ungerade Kanten oder Schnittgrate auf. Zudem kann das Besäumen zu einer Abweichung von der idealen rechteckigen Walztafelkontur führen.
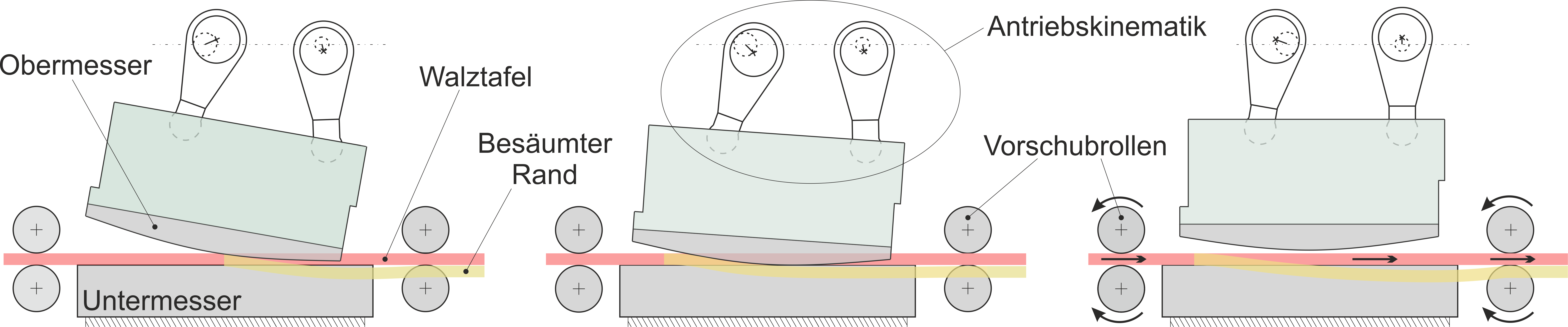
Prinzip des Rollschnittscherens zur Besäumung von Walztafeln.
Im Rahmen dieses Projekts wurde die seitliche Abdrängkraft, welche auf die Besäummesser wirkt, als wesentliche Einflussgröße auf die erzielte Qualität der Schnittkanten identifiziert. Ein Schwerpunkt dieser Arbeit liegt darin, diese Abdrängkraft durch Optimierung der Anlagengeometrie und der Antriebskinematik möglichst konstant zu halten und somit die Qualitätsmängel an der Schnittkante deutlich zu reduzieren. Zudem kann damit der Messerverschleiß verringert werden.
Ein weiterer Schwerpunkt dieser Arbeit liegt auf der Entwicklung einer automatisierten Qualitätskontrolle. Die Qualität und Maßgenauigkeit der Schnittkante wird mittels Bildverarbeitung und Laser-Sensorik automatisiert ausgewertet und in einer Datenbank abgelegt. Auf Basis dieser Daten werden Modelle und Algorithmen entwickelt, um eine gleichbleibend hohe Qualität der Schnittkanten zu gewährleisten, optimale Maschineneinstellungen zu berechnen und den optimalen Messerwechselzeitpunkt vorherzusagen.
Ausgewählte Veröffentlichungen
- A. Zeiler, A. Steinboeck, A. Kugi, and M. Jochum, Lateral Forces in Rolling-Cut Shearing and Their Consequences on Common Edge Defects, Journal of Manufacturing Science and Engineering, vol. 141, iss. 4, p. 41001-1–41001-9, 2019.
[BibTex] [Download]@Article{Zeiler2019, author = {Zeiler, A. and Steinboeck, A. and Kugi, A. and Jochum, M.}, title = {Lateral Forces in Rolling-Cut Shearing and Their Consequences on Common Edge Defects}, journal = {Journal of Manufacturing Science and Engineering}, year = {2019}, volume = {141}, number = {4}, pages = {41001-1--41001-9}, doi = {10.1115/1.4042578}, } - A. Zeiler, A. Steinboeck, M. Vincze, M. Jochum, and A. Kugi, Vision-based inspection and segmentation of trimmed steel edges, in Proceedings of the 18th IFAC Symposium on Control, Optimization and Automation in Mining, Mineral and Metal Processing, Stellenbosch, South Africa, 2019, p. 165–170.
[BibTex]@InProceedings{Zeiler2019a, author = {Zeiler, A. and Steinboeck, A. and Vincze, M. and Jochum, M. and Kugi, A.}, title = {Vision-based inspection and segmentation of trimmed steel edges}, booktitle = {Proceedings of the 18th IFAC Symposium on Control, Optimization and Automation in Mining, Mineral and Metal Processing}, year = {2019}, month = {8}, pages = {165--170}, doi = {10.1016/j.ifacol.2019.09.182}, address = {Stellenbosch, South Africa}, }
Anwendungsbereiche
- Scherprozesse
- Walzwerksautomatisierung
- Kontinuierliche Produktionsprozesse
23.10.2019 Omron
The purpose of this project is to develop a software for estimating 6D pose and grasping points of non-rigid objects in bin-picking scenarios. This software would be used with industrial robots for picking individually different shaped objects like toys, vegetables, and fruits those are randomly piled in boxes or on belt conveyors. Multiple objects of one type are in a box or on a conveyor.
FUNDING:
Company Funding