Schnelle Trajektorienplanung für Robotersysteme unter Berücksichtigung von Hindernissen und dynamisch bewegten Zielen
Projektschwerpunkte
- Schnelle Planung und Neuplanung von Trajektorien
- Kollisionsvermeidung und bewegte Ziele
- MPC-basierte Trajektorienfolgeregelung
Beschreibung
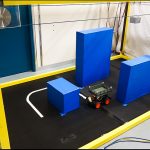
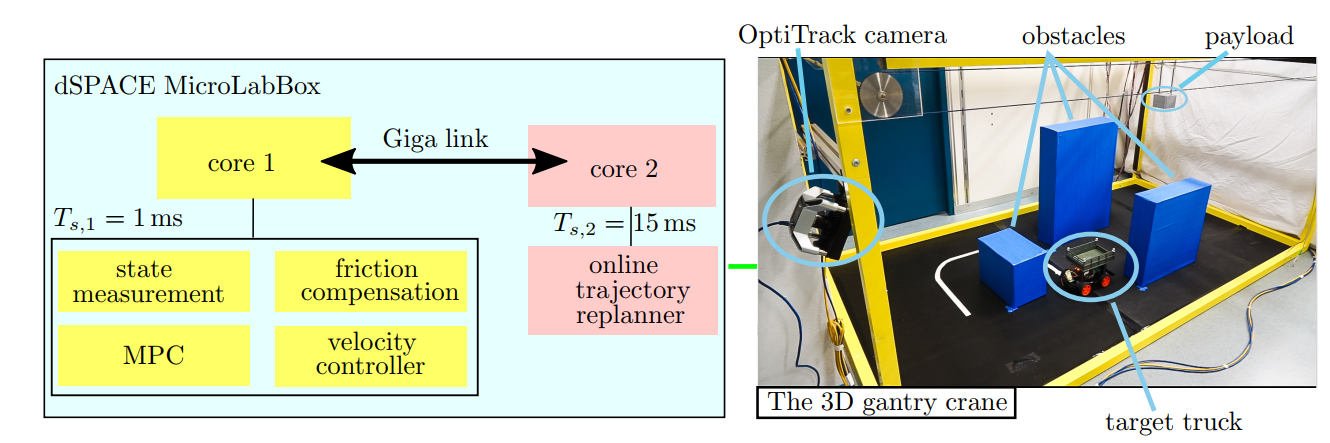
Diese Forschungsarbeit befasst sich mit der Entwicklung neuer Methoden zur schnellen Bahnplanung unter Berücksichtigung von Hindernissen und dynamisch bewegten Zielen, ein wichtiges Thema für verschiedene Anwendungen im Bereich der Robotik, Handhabungssysteme und Baumaschinen wie Kräne oder kollaborierende Roboter. Abb. 1 zeigt den Versuchsaufbau des 3D-Portalkrans im Labormaßstab. Die Aufgabe besteht darin, einen schnellen Algorithmus zur Neuplanung der Trajektorien für die Nutzlast zu implementieren, um den fahrenden LkW zu erreichen und dabei Kollisionen mit Hindernissen zu vermeiden.
Beschreibung
In dieser Forschungsarbeit werden schnelle, optimierungsbasierende Algorithmen zur Trajektorienplanung untersucht und sowohl in der Simulation als auch im Experiment umgesetzt. Da die Optimierung der Trajektorien in der Regel viel Zeit in Anspruch nimmt, ist es sinnvoll, suboptimale Lösungen als anfängliche Schätzung der Trajektorie zu verwenden und die Gesamtlösung iterativ zu verfeinern. Darüber hinaus sollte der vorgeschlagene Algorithmus in der Lage sein, eine neue Trajektorien für bewegte Ziele zu berechnen, indem er zuvor berechnete suboptimale Lösungen aus einer Datenbank verwendet. Darüber hinaus muss eine schnelle Trajektorienplanung jederzeit ausgeführt werden können, d. h. die Algorithmen können jederzeit unterbrochen werden, führen aber immer zu gültigen, wenn auch suboptimalen Ergebnissen. Dies ist eine wichtige Voraussetzung für die Echtzeitfähigkeit der entwickelten Algorithmen.
Der Schwerpunkt dieses Projekts liegt auf der effizienten Trajektorien(neu)planung, welche aus zwei Schritten besteht:
- Zunächst wird ein Offline-Trajektorienplaner implementiert, um eine Datenbank aus zeitoptimalen, kollisionsfreien und dynamisch gültigen Trajektorien aufzubauen, die alle Startpunkte aus einem vordefinierten Startraum mit allen Zielpunkten in einem Zielraum verbindet.
- Zweitens verwendet der Online-Trajektorienreplanner die Offline-Trajektoriendatenbank, um in Echtzeit eine optimale Trajektorie zu erzeugen, die die Bewegung des Ziels berücksichtigt. Der Online-Trajektorienplaner ist ein quadratisches Programm mit linearen Beschränkungen.
Zusätzlich wird ein Trajektorienverfolgungsregler entwickelt, der die dynamischen Beschränkungen für den Portalkran berücksichtigt und den möglichen Einfluss von Modellungenauigkeiten, Störungen und anderen nicht modellierten Effekten kompensiert.
Video
Ausgewählte Publikationen
- M. N. Vu, P. Zips, A. Lobe, F. Beck, W. Kemmetmüller, and A. Kugi, Fast motion planning for a laboratory 3D gantry crane in the presence of obstacles, in Proceedings of the 21st IFAC World Congress, Berlin, Germany, 2020, p. 9508–9514.
[BibTex]@InProceedings{Vu2020, author = {Vu, M.N. and Zips, P. and Lobe, A. and Beck, F. and Kemmetmüller, W. and Kugi, A.}, booktitle = {Proceedings of the 21st IFAC World Congress}, title = {Fast motion planning for a laboratory 3D gantry crane in the presence of obstacles}, doi = {10.1016/j.ifacol.2020.12.2427}, note = {IFAC-PapersOnLine}, number = {2}, pages = {9508--9514}, volume = {53}, address = {Berlin, Germany}, issn = {2405-8963}, month = {06}, year = {2020}, }