
Sasha2019 - 2022
The purpose of this project is to investigate methods needed to make a robot keep order in an assigned space. Read more →

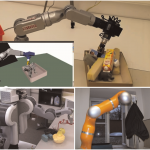
Aeolus2017 - 2019
The goal of the project with Aeolus is to advance current robotic capabilities to pick up unknown objects in conditions of clutter and fetching known objects. Read more →
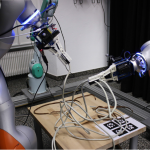
InDex2019 - 2022
The InDex project aims to understand how humans perform in-hand object manipulation and to replicate the observed skilled movements with dexterous artificial hands, merging the concepts of deep reinforcement and transfer learning to generalise in-hand skills for multiple objects and tasks. Read more →
HEAP2019 - 2022
In HEAP we focus on advancing the state-of-the-art for sorting a heap of unknown, irregular objects and provide appropriate benchmarks. Read more →

BURG2019 - 2022
In the BURG Project we set out to boost grasping research by focusing on complete tasks and the related object manipulation constraints. Read more →
RoboCoop2018 - 2022
The project is focused on young people and their interest on STEM disciplines (sciences, technology, engineering, mathematics). RoboCoop will organise workshops, where students have the opportunity to get to know robots. Read more →
iBridge2017 - 2019
The iBridge project is a cross-generational project aimed at increasing the interest of children and pupils in the social and cross-cultural research topics and innovation as well as deepening their relationship to science through the application of robotics in the elderly care technologies. Read more →
Modeling and optimal control of electric machines with redundant stator windings
A fault of an electric machine can yield a potentially dangerous behavior of the overall system in certain applications. In this research projects, methods for the fault detection and the fault-tolerant operation of permanent magnet synchronous machines are developed. Read more →
Modeling and control of injection molding machines
Injection molding is the most prominent way to produce components made of plastics. In this research project, control strategies are developed for the optimal operation of injection molding machines. Read more →
Modeling and optimal control of permanent magnet synchronous motors
Permanent magnet synchronous machines (PMSM) are frequently used in industrial applications as e.g. robotics. This research project is concerned with the optimal control of PMSM, where magnetic saturation and non-sinusoidal field characteristics are systematically taken into account. Read more →