CogX2008 - 2012
The ability to manipulate novel objects detected in the environment and to predict their behaviour after a certain action is applied to them is important for a robot that can extend its own abilities. The goal is to provide the necessary sensory input for the above by exploiting the interplay between perception and manipulation. Read more →

Robots @ Home2007 - 2010
The objective of robots@home is to provide an open mobile platform for the massive introduction of robots into the homes of everyone. The scenario-driven approach is inspired by recent work in cognitive science, neuroscience and animal navigation: a hierarchical cognitive map incorporates topological, metric and semantic information. Read more →
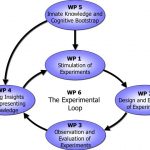
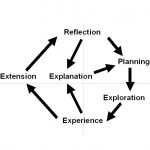
XPERO2006 - 2009
Experimentation with the physical world is a key to gaining insights about the real world and to develop cognitive skills necessary to exist and act in the real world. The more comprehensive and instructive the experiment, the more comprehensive and meaningful can be the insight drawn from it. Read more →

NFN2003 - 2006
Each of us might have encountered the situation to desperately search for a personal item or a location in an unknown environment. At present there is no technical solution for such an assistive system. The newly granted Joint Research Project “Cognitive Vision” attempts to find first solutions in this direction. A human shall be supported with a system that can not only find things, but that can understand the relationship between the human activities and objects involved. Read more →
ActIPret2001 - 2004
The objective of ActIPret is to develope a cognitive vision methodology that interprets and records the activities of people handling tools. Focus is on active observation and interpretation of activities, on parsing the sequences into constituent behaviour elements, and on extracting the essential activities and their functional dependence. Read more →

RobVision2000 - 2000
Industries using a CAD-system to design parts or working areas need a means of feedback to enable a comparison of designed and manufactured structures. Using vision, based on the CAD information, is an effective tool to establish this link. For example, the autonomy of a robotic vehicle is needed in several applications in building and inspecting of large structures, such as ship bodies. The navigation of a walking robot will be demonstrated using this vision tool. Read more →

FlexPaint2000 - 2002
The objective of the project FlexPaint is to provide a system for automatic spray painting. The goal is to paint all arriving parts and to reach a batch size of one. The final solution will make it possible to paint any arriving part in the paint cell without the need for models or other data. The final product will provide a fully self-contained solution to the spray painting problem. Read more →
Tracking Evaluation2001 - 2004
We propose a methodology based on the evaluation of a video database which contains real-world image sequences with well-defined movements of modeled objects. It is suggested to set up and extend this database as a benchmark. Read more →
TOS2004 - 2004
Automatisches Erfassen der Ballflugbahn mit PC-gesteuertem Zweikamerasystem Bestimmung der Ballposition auf 5cm genau und Bestimmung der Schußschärfe auf ± 1 % der Ballgeschwindigkeit. Read more →