24.02.2017 Automated Handling of Highly Deformable Materials
Project focus
- Design and implementation of a prototypical device for the automated handling of limp materials
- Investigation and evaluation of various gripping technologies
- Mathematical modeling of tensile and bending behaviour of dry fibrous materials
- Active control of fibre tension during the handling process
Description
Since the 1980s fibre-reinforced composites (FRPs) were exclusively reserved for “high-end” applications in aerospace and sports industry. Driven by the possibility of stress optimized production and the enormous light-weight potential, there is an increasing interest in the use of fibre fabrics in other industries, such as automotive, machinery and plant manufacturing, etc. A widespread application across all industries, however, requires the reduction of the substantial additional manufacturing costs of composites compared to traditional materials while ensuring the required process reliability. As today’s FRPs are mainly produced in manual and semi-automated processes, future developments will move forward to a flexible, continuous industrialization of existing production processes. In this context, particularly, the (contour) flexible pick-up of dry or preimpregnated fibrous materials from the cutter table or storing and the subsequent controlled lay-up in a forming tool (mold) still represent a challenge for automated handling systems.
Although a number of mathematical models were developed since the 1930s for the prediction of structural changes of dry fibrous materials, these are, due to the model complexity, hardly used in the automated handling. Hence existing handling systems (mostly) operate in open-loop control (keyword: teach-in), i.e. forgoing any model-knowledge and feedback from a suitable sensor.
Experimental setup for the automated handling of limp materials.
Im Rahmen dieses Projekts wird prototypisch ein Handhabungssystem aufgebaut und das Potential der modernen modellbasierten Regelungstechnik für die Handhabung biegeschlaffer Materialien, wie sie die Halbzeuge darstellen, untersucht.
In this project, a prototype of a handling system is set up and the potential of modern model-based control to handle limp materials is examined.
The handling objects under investigation are non-crimp and woven fabric strips of varying structure, thickness and area density. Various gripping technologies are considered and evaluated regarding their suitability for particular fibrous materials. Basic tests are developed to identify the model parameters of the different fabrics in order to simulate the deformation behavior of these materials. The focus on the mathematical model is placed on the subsequent implementation of a model based control system, which is why a real-time prediction of the deformation behavior of a large class of materials has to be developed. Based on these models appropriate strategies for position and force control are designed. The active control of fibre tension during the handling ensures reliable pick-up, maintaining of the geometric definiteness during the handling process (no fiber displacement) and a wrinkle-free, material-friendly lay-up in or on complex shapes.
The subject is not only limited to the handling of carbon-fibre fabrics. The concepts are applicable to many other issues, such as the automated lamination of large vinyl sheets, textile handling, etc.
Videos
Selected publications
- S. Flixeder, Force-Based Cooperative Manipulation of Highly Deformable Materials, A. Kugi and K. Schlacher, Eds., Aachen: Shaker Verlag, 2017, vol. 36.
[BibTex]@Book{Flixeder17a, Title = {Force-Based Cooperative Manipulation of Highly Deformable Materials}, Author = {Flixeder, S.}, Editor = {A. Kugi and K. Schlacher}, Publisher = {Shaker Verlag}, Year = {2017}, Address = {Aachen}, Series = {Modellierung und Regelung komplexer dynamischer Systeme}, Volume = {36}, ISBN = {978-3-8440-5401-9}, Organization = {Institute f{\"u}r Automatisierungs- und Regelungstechnik (TU Wien) und Regelungstechnik und Prozessautomatisierung (JKU Linz)}, } - S. Flixeder, T. Glück, M. Böck, and A. Kugi, Model-Based Signal Processing for the Force Control of Biaxial Gantry Robots, in Proceedings of the 20th IFAC World Congress, Toulouse, France, 2017, p. 3208–3214.
[BibTex]@InProceedings{Flixeder17, author = {Flixeder, S. and Gl\"uck, T. and B\"ock, M. and Kugi, A.}, title = {Model-Based Signal Processing for the Force Control of Biaxial Gantry Robots}, booktitle = {Proceedings of the 20th IFAC World Congress}, year = {2017}, volume = {50}, number = {1}, month = {7}, pages = {3208--3214}, doi = {10.1016/j.ifacol.2017.08.439}, address = {Toulouse, France}, issn = {2405-8963}, } - S. Flixeder, T. Glück, and A. Kugi, Force-based cooperative handling and lay-up of deformable materials: Mechatronic design, modeling, and control of a demonstrator, Mechatronics, vol. 47, p. 246–261, 2017.
[BibTex]@Article{Flixeder16a, Title = {Force-based cooperative handling and lay-up of deformable materials: Mechatronic design, modeling, and control of a demonstrator}, Author = {Flixeder, S. and Gl\"uck, T. and Kugi, A.}, Journal = {Mechatronics}, Pages = {246--261}, Volume = {47}, Year = {2017}, Doi = {10.1016/j.mechatronics.2016.10.003}, ISSN = {0957-4158}, } - S. Flixeder, T. Glück, and A. Kugi, Modeling and Force Control for the Collaborative Manipulation of Deformable Strip-Like Materials, in Proceedings of the 7th IFAC Symposium on Mechatronic Systems & 15th Mechatronics Forum International Conference, Loughborough, UK, 2016, p. 95–102.
[BibTex] [Download]@InProceedings{Flixeder16, author = {Flixeder, S. and Gl\"uck, T. and Kugi, A.}, title = {Modeling and Force Control for the Collaborative Manipulation of Deformable Strip-Like Materials}, booktitle = {Proceedings of the 7th IFAC Symposium on Mechatronic Systems \& 15th Mechatronics Forum International Conference}, year = {2016}, volume = {49}, number = {21}, month = {9}, pages = {95--102}, doi = {10.1016/j.ifacol.2016.10.518}, address = {Loughborough, UK}, issn = {2405-8963}, } - S. Flixeder, T. Glück, M. Böck, R. Neumann, and A. Kugi, Kombinierte Pfad- und Nachgiebigkeitsregelung für ein Portalsystem mit experimenteller Validierung, in Tagungsband Mechatronik, Dortmund, Germany, 2015, p. 37–42.
[BibTex] [Download]@InProceedings{Flixeder15, author = {Flixeder, S. and Gl\"uck, T. and B\"ock, M. and Neumann, R. and Kugi, A.}, title = {{K}ombinierte {P}fad- und {N}achgiebigkeitsregelung f{\"u}r ein {P}ortalsystem mit experimenteller {V}alidierung}, booktitle = {Tagungsband Mechatronik}, year = {2015}, month = {3}, pages = {37--42}, address = {Dortmund, Germany}, } - S. Flixeder, T. Glück, M. Böck, and A. Kugi, Combined Path Following and Compliance Control with Application to a Biaxial Gantry Robot, in Proceedings of the IEEE Conference on Control Applications (CCA), Antibes, France, 2014, p. 796–801.
[BibTex] [Download]@InProceedings{Flixeder14, author = {Flixeder, Stefan and Gl\"uck, Tobias and B\"ock, Martin and Kugi, Andreas}, title = {Combined Path Following and Compliance Control with Application to a Biaxial Gantry Robot}, booktitle = {Proceedings of the IEEE Conference on Control Applications (CCA)}, year = {2014}, month = {10}, pages = {796--801}, doi = {10.1109/CCA.2014.6981438}, address = {Antibes, France}, } - S. Flixeder, T. Glück, M. Böck, and A. Kugi, Kombinierte Pfad- und Impedanzregelung für ein Portalsystem, in Tagungsband GMA-Fachausschuss 1.40 “Theoretische Verfahren der Regelungstechnik”, Anif/Salzburg, Austria, 2014, p. 128–154.
[BibTex]@InProceedings{Flixeder14a, author = {Flixeder, S. and Gl\"uck, T. and B\"ock, M. and Kugi, A.}, title = {Kombinierte {P}fad- und {I}mpedanzregelung f\"ur ein {P}ortalsystem}, booktitle = {Tagungsband GMA-Fachausschuss 1.40 "Theoretische Verfahren der Regelungstechnik"}, year = {2014}, month = {9}, pages = {128--154}, address = {Anif/Salzburg, Austria}, }
Applications
- Aerospace
- Automotive
- Machinery and plant manufacturing
Project partners and funding
08.06.2016 RALLI
Robotic Action-Language Learning through Interaction
Future social robots will need the ability to acquire new tasks and behaviors on the job both through observation and through natural language instruction, for robot designers cannot build in all environmental and task contingencies in typical application domains such as health care settings or people’s homes. In this project, we tackle the critical subproblem of learning new actions and their corresponding words by the artificial system observing how those actions are performed and expressed by humans. As a result, robots will not only understand action concepts, but will also be able to learn and execute actions, and talk about them. We propose to develop psychologically plausible observation and experimentation-based algorithms for action verb learning that are deeply integrated with natural language understanding and generation. The algorithms will allow the robot to observe and interpret human actions, and distill from them constitutive aspects such as the motion trajectories and involved objects. At the same time, the robot will also be able to parse a concomitant utterance describing the action and thus relate syntactic elements of the verbal description to semantic elements in the action representation. By aligning syntactic roles and semantic types, the robot then can build an association between verb phrase structure and action argument types. The outcome of the project will thus contribute an important, currently missing part for future social robots.
Partner
Funding

08.06.2016 ACROSSING
Advanced TeChnologies and PlatfoRm fOr Smarter ASsisted LivING
ACROSSING is an innovative research training network funded by the EU H2020 Marie Sklodowska-Curie Actions programme which aims to change the way millions of the older people in Europe live and maintain wellbeing. The project aims to make a critical contribution towards an open smart home technology infrastructure by interlinking disciplines from sensing technologies, context inferences and interaction and considering key principles of social impact, ethics, security and privacy.
Scientific target:
Develop technologies for smart-home based assisted living, including 4 specialised technology infrastructures, a shared experiment data repository and guidelines for smart home development based on best-practice demonstrators.
Training target:
Educate 15 ESRs in multi-disciplinary, transferable skills to become future research leaders in assisted living and create networks for future collaborations among partners.
Social target:
Increase European innovation capacity and competitiveness in smart home technology through the collaboration of industry and academia by integrating 4 ICT-driven application demonstrators as best-practice examples for the envisioned open SH technology infrastructure.
Partners
De Monfort University Leicester
Universität Passau
Austrian Institute of Technology
Noldus Information Technology
Philips
Ingeniería y Soluciones Informáticas (ISOIN)
CERTH – Centre for Research & Technology Hellas
Ulster University
Universidad Politécnica de Madrid (UPM)
Funding
Marie Sklodowska-Curie EU Framework for Research and Innovation Horizon 2020
08.06.2016 RoboFit
Im Projekt RoboFit besuchen uns Klassen (von Vorschulalter bis Oberstufe), um einen Vortrag über Robotik zu hören, bei einem kurzen Workshop sich an Roboternavigation zu versuchen, und um eine Demo unserer Roboter Romeo oder Pepper zu sehen. Außerdem stellen wir unser Wissen und unsere Erfahrung mit dem von uns entwickelten Schräge Roboter Konzept sowie mit der Durchführung von Benutzerstudien im Bereich Mensch-Roboter Interaktion dem Projekt zur Verfügung und betreuen vorwissenschaftliche Arbeiten im Bereich Robotik.



Projektteam
Prof. Markus Vincze ist der Öffentlichkeit als Robotikforscher bekannt. Zuletzt sorgten er und sein Team für Schlagzeilen mit HOBBIT, einem Roboter, der älteren Menschen ermöglichen soll, länger in ihrer eigenen Wohnung zu bleiben. Öffentlichkeitsprojekte wie z.B. die „Lange Nacht der Roboter“ oder die Mitarbeit bei der Roboterausstellung im Technischen Museum Wien sind wichtig, um der von Science-Fiction inspirierten breiten Masse zu zeigen, wie die Robotik in real aussieht und mit welchen Arbeiten sich derzeitige Roboterexperten wirklich beschäftigen.
Dr. techn. Lara Lammer ist eine kritische Denkerin, die verschiedene Ideen generiert, um die Probleme des 21. Jahrhunderts zu adressieren, um dann Lösungen mit anderen kreativen Köpfen zu konzipieren. Sie ist Projekleiterin, Kommunikatorin und Wissenschaftlerin in den Bereichen Robotik und Bildungsrobotik an der Technischen Universität Wien. Ihre wissenschaftliche Arbeit fokussiert sich auf holistische Konzepte und systemisches Denken. Sie hat das Konzept Schräge Roboter entwickelt und in verschiedenen Workshops (von Kindergarten bis Universität) angewandt, um junge Menschen in die Robotik aus der Perspektive der Produktentwicklung einzuführen.
Julian Angel, PhD, ist Experte in Mensch-Roboter Interaktion und entwickelt im EU Projekt ER4STEM (Educational Robotics for Science, Technology, Engineering and Mathematics) ein Framework und eine Plattform um diverse europäische Aktivitäten in der Bildungsrobotik unter einem Dach zu vereinen.
Clara Haider, Matthias Hirschmanner, Clemens Korner, Anvesh Nookala und Tobias Wolfmayr sind studentische Mitarbeiter, die das Projekt bei den Schulbesuchen, Workshops und Demos tatkräftig unterstützen.
Funding
FFG – Österreichische Forschungsförderungsgesellschaft
01.09.2015 Fundamentals of opto-mechatronic systems (OMC)
Project focus
- Mechatronic system design for maximum performance
- Mechatronic design of tip-tilt scanning mirror units for sensor applications
- Methods for enabling hybrid reluctance actuation based scanning systems
- Control methods for opto-mechatronic components in sensor systems
- Design and control of active platforms for robot-based inline measurement systems
Description
Currently innovation is taking place at the border of disciplines rather than in one individual field of engineering. This particularly holds for application domains that span more than one field of engineering, since a high level of system integration from different disciplines provides solutions that a single domain alone cannot provide. As an example, the combination of optics and mechatronics form the interdisciplinary field of opto-mechatronics. In this respect, the fusion of precision engineering, mechatronic systems and optical components carries a great potential for increasing precision, speed and versatility of 3D optical measurement systems.
The combination of e.g. an off the shelf dimensional sensor and a linear positioning axis is always limited by the performance of the standard automation components. For example the intrinsic mechanical mode shapes of the actuator, the sensor components and their mountings, may limit the speed and precision of motion during scanning, and thereby the reliability of the measurement data. To overcome the limitations arising from component-based designs, an integrated mechatronic design approach is needed that considers all system components as well as the targeted application from the very begin of the system development.
The main goal of this systematic integration of mechanical, optical, electrical components as well as control systems into one opto-mechatronic system is to boost the system performance in terms of speed and precision. This holistic system view shall enable a resulting system performance as close as possible to the Pareto optimum for the respectively applied technology. Best practice examples of highly integrated systems are state of the art optical lithography systems for the semiconductor industry, telescopes, optical free-space communication, laser scanning microscopy and atomic force microscopes.
The extension of dimensional optical sensors towards 3D measurement capabilities with high precision and high speed will enable the development of technologies for integrated inspection systems of future production lines, able to perform versatile measurements on various free-formed surfaces. They will particularly be suited for high precision applications and measurements in flexible production environments, where sizes and relevant features may vary significantly.
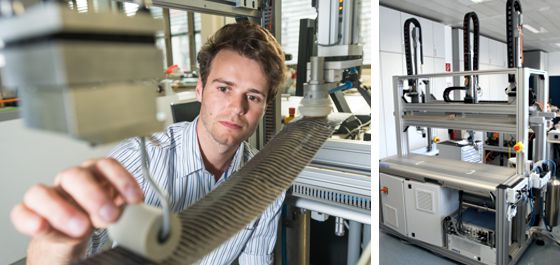
Tip-Tilt-mirror system scanning a laser beam over a surface for 3D-inspection
Mechatronic Design and Integration for Maximum Performance
A systematic mechatronic design approach that considers the holistic system view is developed and researched along the design of fast scanning mirror solutions, where both, generic approaches for general purposes and highly customized approaches for dedicated applications, are considered. Structural design and analysis, actuator and sensor principles and methods, actuator and sensor placement and integration, modes of operation as well as mechatronic design methods are considered in this course to deal with design trade-offs and to ensure optimal system performance.
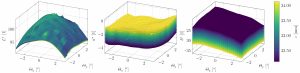
Pareto Front Estimation for Actuation Technologies
In the course of designing high performance mechatronic scanning systems, several contradicting requirements, such as speed and range, must be met at the same time. Actuators are a key component in this relation, as depending on the system specifications, different actuation technologies may prove advantageous. To provide a design tool for systematically tackling this challenge in the design phase a method for estimating the limitations of various actuation technologies has been developed. The key idea is to estimate the tradeoff limit curve, i.e. the Pareto front, for each actuation technology in the 2-dimensional range-speed performance space to identify the actuation principle enabling the highest performance for a desired set of range and bandwidth requirements. The results in Fig.2 illustrate the advantages and limitations of the three established actuation principles and reveal regions in which a particular actuation principle outperforms the other ones.
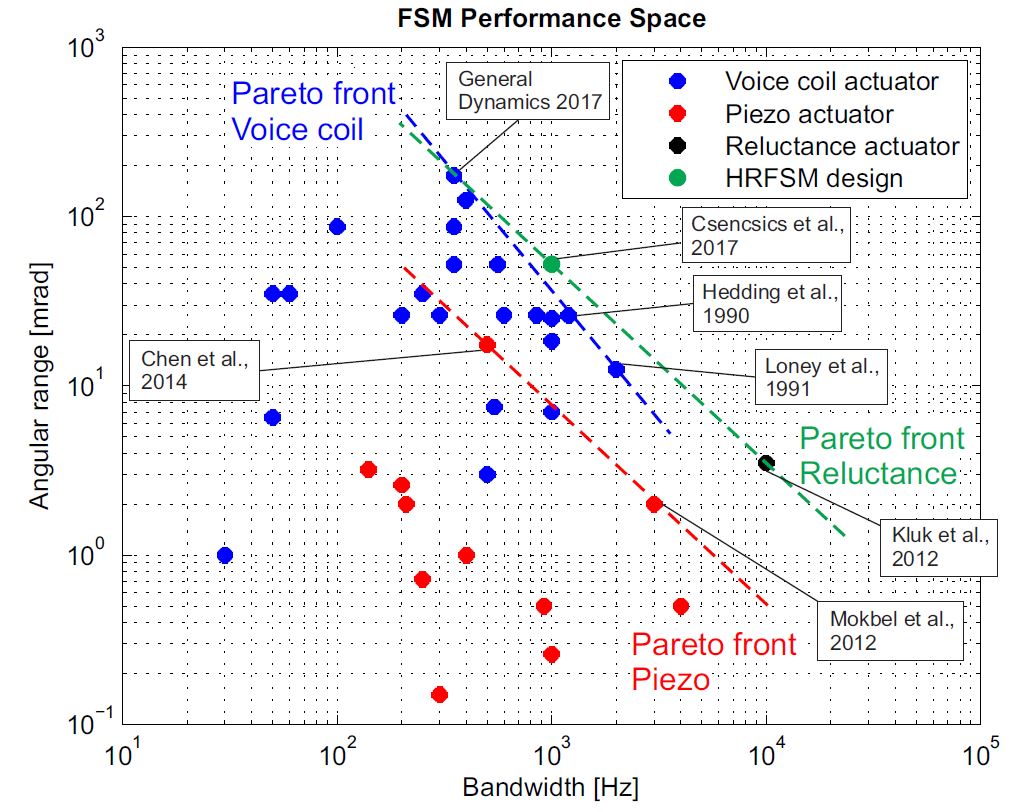
Estimated Pareto fronts for voice coil, piezo and hybrid reluctance actuated FSM systems.
Dynamic Performance Estimation
A reliable estimation of the resulting performance of several performance outputs, such as energy consumption, tracking error or resolution, of the feedback and/or feedforward controlled system is a valuable tool in mechatronic system design. A reliable virtual prototyping framework would enable (i) the cutting of costs, by identifying most important components, (ii) a speed-up of the design process, and (iii) enhanced insights into the design and the interrelations between components. For this purpose an integrated framework for the dynamic performance estimation (DPE) of mechatronic scanners in the design phase, which is based on frequency domain models of system components and signals in the system. Fig.3 shows a comparison of estimated and measured rms values for current consumption and tracking error of a commercial fast steering mirror tracking desired scan trajectories.
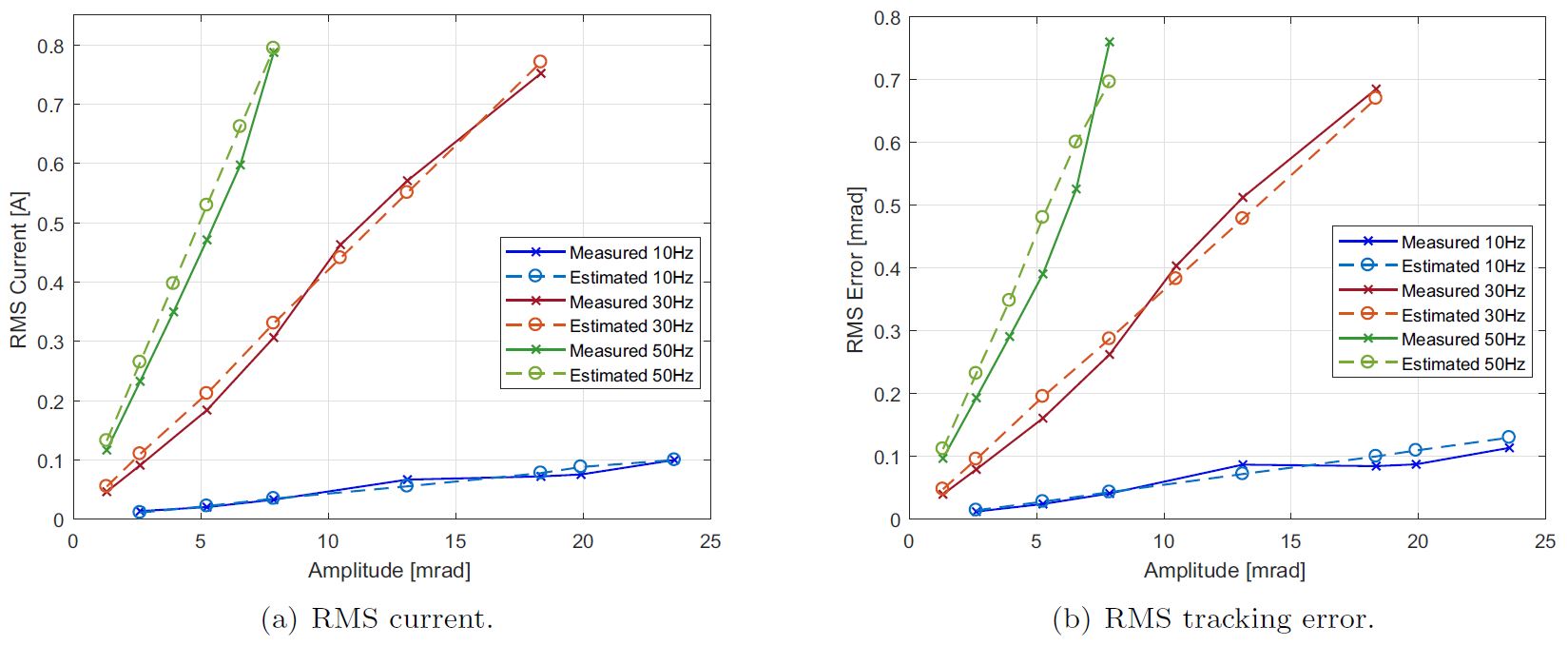
Comparison of estimated and measured rms values for the performance outputs coil current and tracking error for a FSM tracking 10 Hz, 30 Hz and 50 Hz raster trajectories of arbitrary amplitude.
Integration of System, Control and Trajectory Design
Tuning the performance of a mechatronic system to approach the Pareto front in the performance space is clearly linked to the extent a system can be tailored to a specific task. For scanning systems, the first step in a systematic design approach is the identification of the targeted mode of operation and the applied reference trajectories, in order to enable a tailored process and controller design.
Scan-based optical metrology systems in industry need to be exceptionally fast to enable the required throughput, such that Lissajous-based scan trajectories are identified as most suitable for this purpose. The trajectory builds up gradually (multi-resolution), providing an overview of the entire scan area after a fraction of the frame time, which is a valuable property. For tracking the sinusoidal reference signals of each axis tailored dual-tone (DT) are developed (see Fig. 4(a)) , which show localized high control efforts and good tracking only at the two drive frequencies of the Lissajous trajectory and reduce the tracking error by one order of magnitude compare to the state of the art. Extending the integration to the system design by tuning the resonance frequency of each axis to the desired sinusoidal reference (see Fig. 4(b)) additionally enables a reduction of power consumption by two orders of magnitude and an extension of the scan range by a factor of 60 (see Fig. 4(c)).
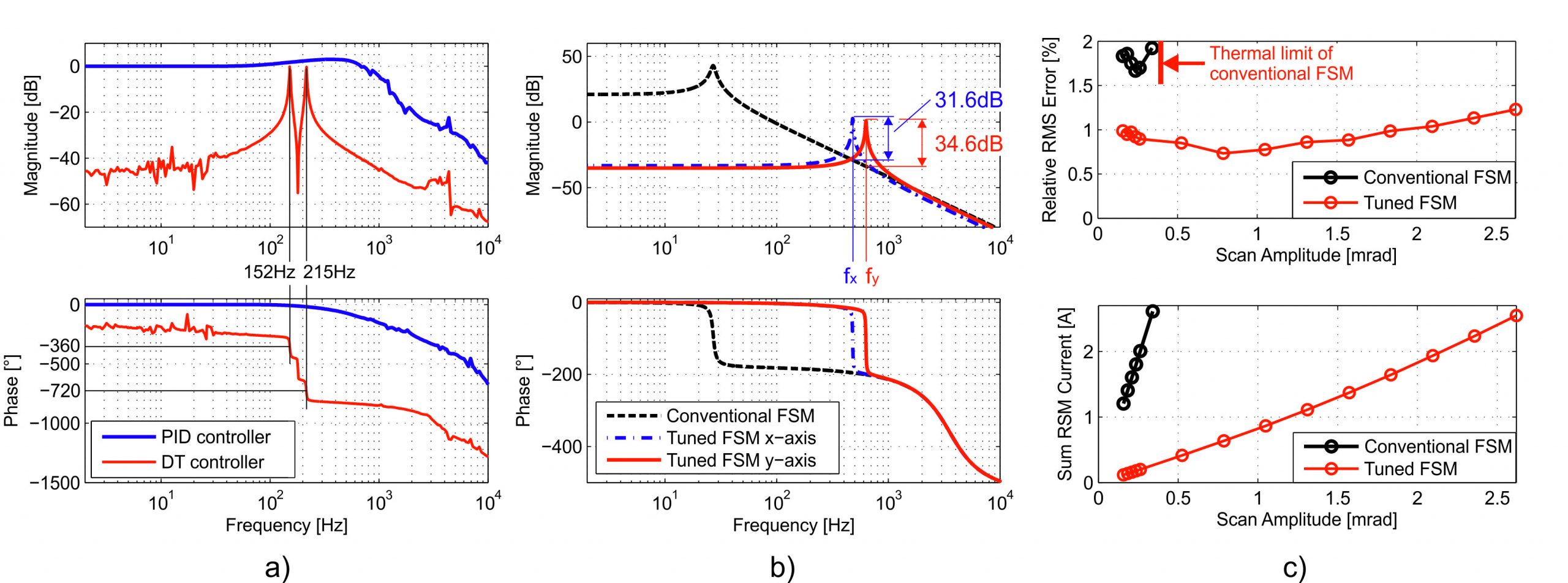
Integration of FSM system, control and trajectory design. (a) shows the closed-loop TF of the FSM with PID and DT controller, (b) depicts the tailored mechanical design and (c) shows the improved tracking error and scan range.
Integrated High Performance Tip/Tilt Scanning Mirrors
Due to a higher force density as compared to voice coil actuators and larger working ranges as compared to piezos, hybrid reluctance (HR) actuators have been identified as attractive alternative for tip/tilt actuators. A common disadvantage of HR actuated systems reported so far is their large size, which is either caused by the size and number of actuators or the low level of system integration. The system dimensions are, however, a key property when it comes to the integration of FSMs into compact optical systems, such as in scanning laser metrology, projection systems or optical inter-satellite communication.
In order to enable the integration with optical sensor heads a highly integrated FSM system was designed based on a previously developed HR tip/tilt actuator. The compact FSM, depicted in Fig. 5, has a diameter of only 32 mm (about the diameter of a 2 Euro coin), a height of 30 mm and carries a 20 mm mirror. It provides a mechanical angular range of ±3° (±52.4 mrad) and a small signal closed-loop bandwidth of 1.5 kHz in both axes. Compared to a state-of-the-art hybrid reluctance actuated FSM systems the volume of the system is reduced by one order of magnitude, while the product of range times bandwidth, representing a measure for the system performance, is concurrently improved by 50%.
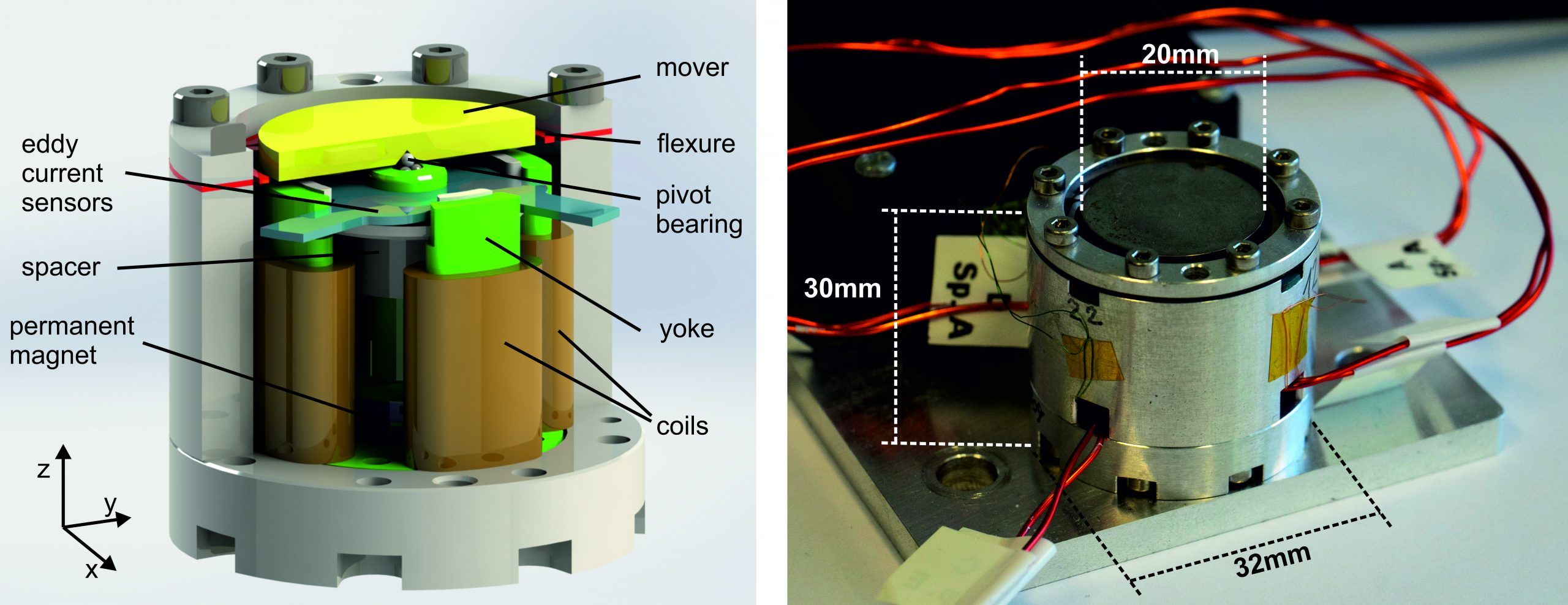
CAD rendering and protoype of compact HR actuated FSM system.
Hybrid Reluctance Actuation for Next Generation Scanning and Positioning Systems
Next-generation high-quality motion systems require high-precision actuators with higher energy efficiency and larger force to improve the system throughput. Particularly, actuators with a motor constant higher than comparable voice coil actuators are highly desired. This project investigates hybrid reluctance actuators (HRAs) with guiding flexures as a promising candidate of next-generation systems.
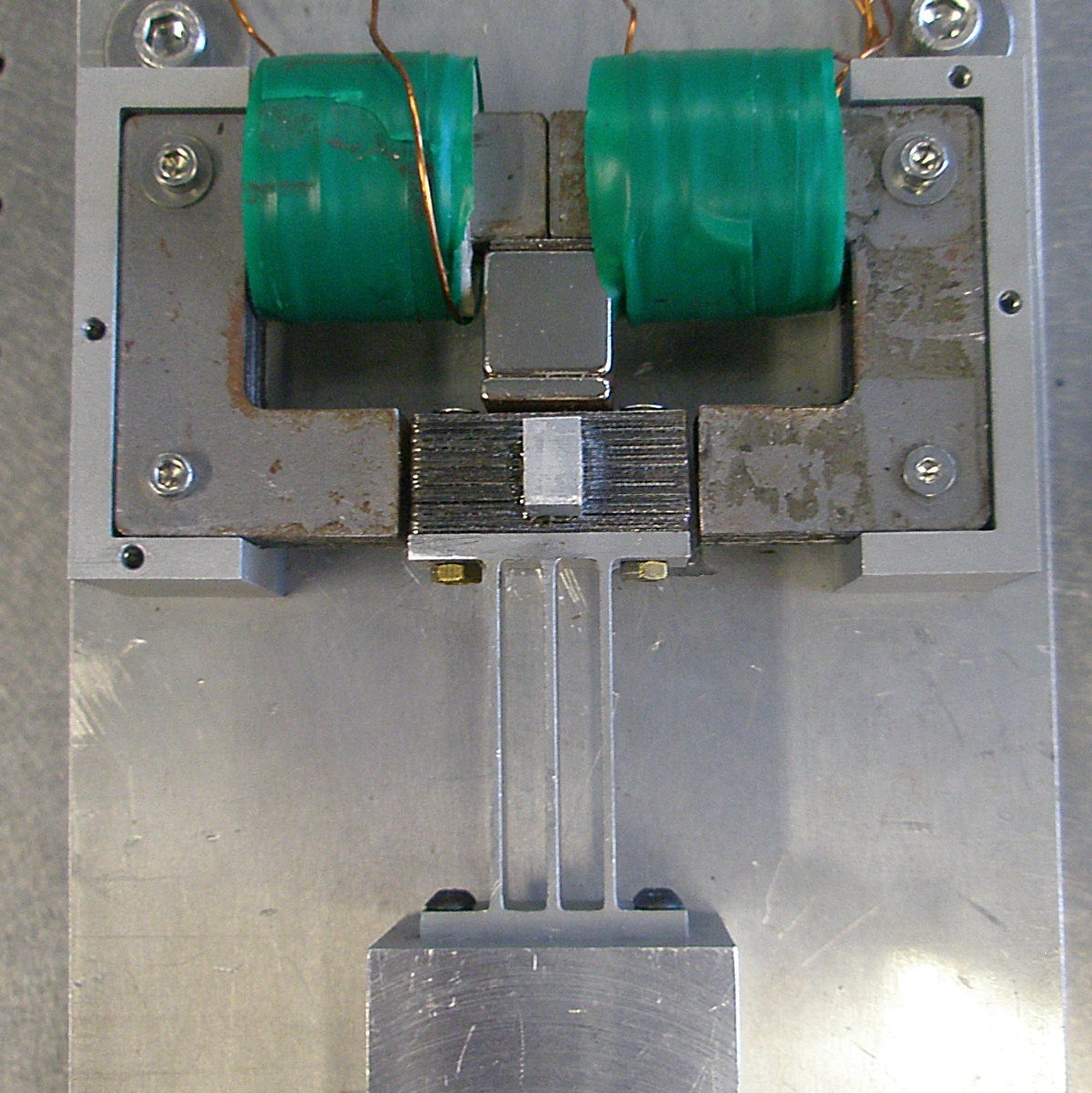
Experimental linear 1DoF hybrid reluctance actuator.
See sub-project for further information: Hybrid reluctance actuators for high precision motion
Precision Motion Control
Control methods for optimal control and operation of opto-mechatronic systems are developed based on dynamic models of the opto-mechatronic systems, which are derived by system identification methods and physics based modeling. Targeted control approaches for systems requiring arbitrary scan motion include model based control as well as two degrees of freedom (2DOF) control. Repetitive control and iterative learning control approaches are investigated for repetitive motion patterns and noise resilient controllers are developed and tested for narrow band motion control, such as in resonant scanning mode. Real-time and DAQ systems that comprise field programmable gate arrays (FPGA), digital signal processors (DSP), and System-on-Chip (SoC) architectures are evaluated for the implementation of algorithms such as the real-time control system for operation, data-acquisition, signal processing and combination of sensor signals.
Active Platforms for Robotic Inline Measurement Systems
High precision in-line measurements on free form surfaces are considered a key factor for the industrial production of the future. Robot-based measurement systems provide the required flexibility but are typically lacking the required precision. The scope of this project is the development of a measurement platform designed as end effector for industrial robots, which carries a measurement or inspection tool and compensates for environmental disturbances, enabling precision inline measurements on arbitrarily oriented surfaces.
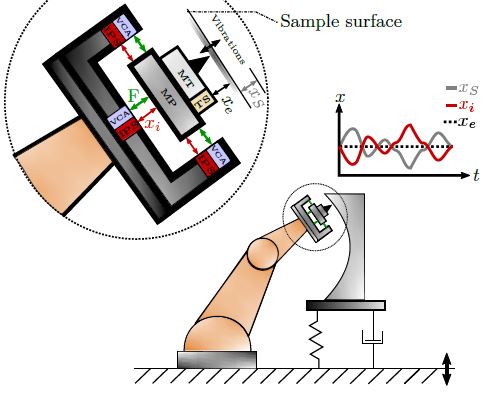
Measurement platform for robot-based high precision in-line measurements on free form surfaces.
See sub-project for further information: Robotic inline metrology for freeform surfaces
Applications
- In-line metrology
- Precision motion systems
Related publications
Journal articles
- S. Ito, F. Cigarini, and G. Schitter, Flux-controlled Hybrid Reluctance Actuator for High-precision Scanning Motion, IEEE Transactions on Industrial Electronics, vol. 67, iss. 11, pp. 9593-9600, 2020.
[BibTex] [Download]@Article{TUW-282490, author = {Ito, Shingo and Cigarini, Francesco and Schitter, Georg}, title = {Flux-controlled Hybrid Reluctance Actuator for High-precision Scanning Motion}, journal = {IEEE Transactions on Industrial Electronics}, year={2020}, volume={67}, number={11}, pages={9593-9600}, doi = {10.1109/TIE.2019.2952829}, keywords = {Actuators, Nanopositioning, Magnetic variables control, Motion control}, }
- F. Cigarini, S. Ito, S. Troppmair, and G. Schitter, Comparative Finite Element Analysis of a Voice Coil Actuator and a Hybrid Reluctance Actuator, IEEJ Journal of Industry Applications, vol. 8, iss. 2, 2019.
[BibTex]@Article{TUW-276121, author = {Cigarini, Francesco and Ito, Shingo and Troppmair, Stefan and Schitter, Georg}, title = {Comparative Finite Element Analysis of a Voice Coil Actuator and a Hybrid Reluctance Actuator}, journal = {IEEJ Journal of Industry Applications}, year = {2019}, volume = {8}, number = {2}, doi = {10.1541/ieejjia.8.192}, keywords = {Electromagnetic actuators, high-precision motion, finite element analysis}, numpages = {8} }
- E. Csencsics, S. Ito, J. Schlarp, and G. Schitter, System Integration and Control for 3D Scanning Laser Metrology, IEEJ Journal of Industry Applications, vol. 8, iss. 2, 2019.
[BibTex] [Download]@Article{TUW-272918, author = {Csencsics, Ernst and Ito, Shingo and Schlarp, Johannes and Schitter, Georg}, title = {System Integration and Control for 3D Scanning Laser Metrology}, journal = {IEEJ Journal of Industry Applications}, year = {2019}, volume = {8}, number = {2}, note = {eingeladen}, doi = {10.1541/ieejjia.8.207}, keywords = {Mechatronic imaging systems, system integration, scanning laser metrology, model based control, iterative learning control}, numpages = {11} }
- S. Ito, S. Troppmair, F. Cigarini, and G. Schitter, High-speed Scanner with Nanometer Resolution Using a Hybrid Reluctance Force Actuator, IEEJ Journal of Industry Applications, vol. 8, iss. 2, 2019.
[BibTex]@Article{TUW-272944, author = {Ito, Shingo and Troppmair, Stefan and Cigarini, Francesco and Schitter, Georg}, title = {High-speed Scanner with Nanometer Resolution Using a Hybrid Reluctance Force Actuator}, journal = {IEEJ Journal of Industry Applications}, year = {2019}, volume = {8}, number = {2}, doi = {10.1541/ieejjia.8.170}, keywords = {High-precision actuators, hybrid reluctance actuator, nanopositioning, motion control.}, numpages = {7} }
- S. Ito, S. Troppmair, B. Lindner, F. Cigarini, and G. Schitter, Long-range Fast Nanopositioner Using Nonlinearities of Hybrid Reluctance Actuator for Energy Efficiency, IEEE Transactions on Industrial Electronics, vol. 66, iss. 4, 2019.
[BibTex] [Download]@Article{TUW-271193, author = {Ito, Shingo and Troppmair, Stefan and Lindner, Bernhard and Cigarini, Francesco and Schitter, Georg}, title = {Long-range Fast Nanopositioner Using Nonlinearities of Hybrid Reluctance Actuator for Energy Efficiency}, journal = {IEEE Transactions on Industrial Electronics}, year = {2019}, volume = {66}, number = {4}, doi = {10.1109/TIE.2018.2842735}, keywords = {Actuators, motion control, nanoposition- ing, magnetic circuits}, numpages = {9}, }
- E. Csencsics, J. Schlarp, T. Schopf, and G. Schitter, Compact High Performance Hybrid Reluctance Actuated Fast Steering Mirror System, Mechatronics, vol. 62, 2019.
[BibTex] [Download]@Article{TUW-283804, author = {Csencsics, Ernst and Schlarp, Johannes and Schopf, Tobias and Schitter, Georg}, title = {Compact High Performance Hybrid Reluctance Actuated Fast Steering Mirror System}, journal = {Mechatronics}, year = {2019}, volume = {62}, doi = {10.1016/j.mechatronics.2019.102251}, keywords = {Fast steering mirror, Hybrid reluctance actuation, Flux steering, Flexure Design, Tip/tilt system}, numpages = {17} }
- E. Csencsics, B. Sitz, and G. Schitter, Integration of Control Design and System Operation of a High Performance Piezo-actuated Fast Steering Mirror, IEEE/ASME Transactions on Mechatronics, vol. 25, iss. 1, p. 239–247, 2020.
[BibTex] [Download]@article{TUW-283802, author = {Csencsics, Ernst and Sitz, Benjamin and Schitter, Georg}, title = {Integration of Control Design and System Operation of a High Performance Piezo-actuated Fast Steering Mirror}, journal = {IEEE/ASME Transactions on Mechatronics}, year = {2020}, volume = {25}, number = {1}, pages = {239--247}, numpages = {9}, doi = {10.1109/TMECH.2019.2959087}, keywords = {Fast steering mirror, System analysis and design, Optimal control, Motion control, Lissajous trajectory} }
- E. Csencsics, S. Ito, J. Schlarp, and G. Schitter, Hochpräzise roboterbasierte 3D-In-Prozess-Messtechnik, E&I Elektrotechnik und Informationstechnik, vol. 135, iss. 6, p. 382–388, 2018.
[BibTex]@Article{TUW-272940, author = {Csencsics, Ernst and Ito, Shingo and Schlarp, Johannes and Schitter, Georg}, title = {Hochpr{\"a}zise roboterbasierte 3D-In-Prozess-Messtechnik}, journal = {E{\&}I Elektrotechnik und Informationstechnik}, year = {2018}, volume = {135}, number = {6}, pages = {382--388}, doi = {10.1007/s00502-018-0636-1}, keywords = {In-Prozess-Messtechnik; optische Sensoren; 3D-Messtechnik; opto-mechatronische Systeme; Systemintegration} }
- E. Csencsics, J. Schlarp, and G. Schitter, High Performance Hybrid-Reluctance-Force-based Tip/tilt System: Design, Control and Evaluation, IEEE/ASME Transactions on Mechatronics, vol. 23, iss. 5, p. 2494–2502, 2018.
[BibTex] [Download]@Article{TUW-272938, author = {Csencsics, Ernst and Schlarp, Johannes and Schitter, Georg}, title = {High Performance Hybrid-Reluctance-Force-based Tip/tilt System: Design, Control and Evaluation}, journal = {IEEE/ASME Transactions on Mechatronics}, year = {2018}, volume = {23}, number = {5}, pages = {2494--2502}, doi = {10.1109/TMECH.2018.2866272}, keywords = {Reluctance actuator, Flux steering, Tip/tilt sys- tem, Flexure design, Fast steering mirror} }
- E. Csencsics, M. Thier, R. Hainisch, and G. Schitter, System and Control Design of a Voice Coil Actuated Mechanically Decoupling Two-body Vibration Isolation System, IEEE/ASME Transactions on Mechatronics, vol. 23, iss. 1, 2018.
[BibTex] [Download]@Article{TUW-263854, author = {Csencsics, Ernst and Thier, Markus and Hainisch, Reinhard and Schitter, Georg}, title = {System and Control Design of a Voice Coil Actuated Mechanically Decoupling Two-body Vibration Isolation System}, journal = {IEEE/ASME Transactions on Mechatronics}, year = {2018}, volume = {23}, number = {1}, doi = {10.1109/TMECH.2017.2771440}, keywords = {Vibrations, Optimal control, System analysis and design}, numpages = {10} }
- E. Csencsics and G. Schitter, System Design and Control of a Resonant Fast Steering Mirror for Lissajous-based Scanning, IEEE/ASME Transactions on Mechatronics, vol. 22, iss. 5, pp. 1963-1972, 2017.
[BibTex] [Download]@Article{TUW041020172, author = {Csencsics, E. and Schitter, G.}, title = {System Design and Control of a Resonant Fast Steering Mirror for Lissajous-based Scanning}, journal = {IEEE/ASME Transactions on Mechatronics}, year = {2017}, volume = {22}, number = {5}, pages = {1963-1972}, doi = {10.1109/TMECH.2017.2722578} }
Conference articles
- F. Cigarini, S. Ito, J. Konig, A. Sinn, and G. Schitter, Compensation of Hysteresis in Hybrid Reluctance Actuator for High-Precision Motion, in Proceedings of the Joint Conference 8th IFAC Symposium on Mechatronic Systems (MECHATRONICS 2019), and 11th IFAC Symposium on Nonlinear Control Systems (NOLCOS 2019), 2019.
[BibTex]@InProceedings{TUW-281659, author = {Cigarini, Francesco and Ito, Shingo and Konig, Julian and Sinn, Andreas and Schitter, Georg}, title = {Compensation of Hysteresis in Hybrid Reluctance Actuator for High-Precision Motion}, booktitle = {Proceedings of the Joint Conference 8th IFAC Symposium on Mechatronic Systems (MECHATRONICS 2019), and 11th IFAC Symposium on Nonlinear Control Systems (NOLCOS 2019)}, year = {2019}, volume = {52/15}, note = {Vortrag: Joint Conference 8th IFAC Symposium on Mechatronic Systems (MECHATRONICS 2019), and 11th IFAC Symposium on Nonlinear Control Systems (NOLCOS 2019), Wien; 2019-09-04 -- 2019-09-06}, doi = {10.1016/j.ifacol.2019.11.721}, journal = {IFAC-PapersOnLine/Elsevier}, keywords = {Hybrid reluctance actuator, magnetic hysteresis, magnetic flux control}, numpages = {6} }
- E. Csencsics, B. Sitz, and G. Schitter, A Fast Piezo Actuated Tip/Tilt Mirror for raster scan applications, in Proceedings of the Joint Conference 8th IFAC Symposium on Mechatronic Systems (MECHATRONICS 2019), and 11th IFAC Symposium on Nonlinear Control Systems (NOLCOS 2019), 2019.
[BibTex] [Download]@InProceedings{TUW-281660, author = {Csencsics, Ernst and Sitz, Benjamin and Schitter, Georg}, title = {A Fast Piezo Actuated Tip/Tilt Mirror for raster scan applications}, booktitle = {Proceedings of the Joint Conference 8th IFAC Symposium on Mechatronic Systems (MECHATRONICS 2019), and 11th IFAC Symposium on Nonlinear Control Systems (NOLCOS 2019)}, year = {2019}, volume = {52/15}, note = {Vortrag: Joint Conference 8th IFAC Symposium on Mechatronic Systems (MECHATRONICS 2019), and 11th IFAC Symposium on Nonlinear Control Systems (NOLCOS 2019), Wien; 2019-09-04 -- 2019-09-06}, doi = {10.1016/j.ifacol.2019.11.689}, journal = {IFAC-PapersOnLine/Elsevier}, keywords = {Fast steering mirror, System analysis and design, Motion control, Piezo actuation, Optomechatronics}, numpages = {6} }
- S. Ito, B. Lindner, and G. Schitter, Sample-tracking Vibration Isolation with Hybrid Reluctance Actuators for Inline Metrology, in Proceedings of the Joint Conference 8th IFAC Symposium on Mechatronic Systems (MECHATRONICS 2019), and 11th IFAC Symposium on Nonlinear Control Systems (NOLCOS 2019), 2019.
[BibTex]@InProceedings{TUW-281655, author = {Ito, Shingo and Lindner, Bernhard and Schitter, Georg}, title = {Sample-tracking Vibration Isolation with Hybrid Reluctance Actuators for Inline Metrology}, booktitle = {Proceedings of the Joint Conference 8th IFAC Symposium on Mechatronic Systems (MECHATRONICS 2019), and 11th IFAC Symposium on Nonlinear Control Systems (NOLCOS 2019)}, year = {2019}, volume = {52/15}, note = {Vortrag: Joint Conference 8th IFAC Symposium on Mechatronic Systems (MECHATRONICS 2019), and 11th IFAC Symposium on Nonlinear Control Systems (NOLCOS 2019), Wien; 2019-09-04 -- 2019-09-06}, doi = {10.1016/j.ifacol.2019.11.731}, journal = {IFAC-PapersOnLine/Elsevier}, keywords = {Vibration control, Micro and Nano Mechatronic Systems, Motion Control Systems}, numpages = {6} }
- F. Cigarini, S. Ito, S. Troppmair, and G. Schitter, Comparison of a Voice Coil and a Hybrid Reluctance Actuator via FEM, in Proceedings of the IEEJ International Workshop on Sensing, Actuation, Motion Control and Optimization (SAMCON), 2018.
[BibTex]@InProceedings{TUW-268854, author = {Cigarini, Francesco and Ito, Shingo and Troppmair, Stefan and Schitter, Georg}, title = {Comparison of a Voice Coil and a Hybrid Reluctance Actuator via FEM}, booktitle = {Proceedings of the IEEJ International Workshop on Sensing, Actuation, Motion Control and Optimization (SAMCON)}, year = {2018}, note = {Vortrag: IEEJ International Workshop on Sensing, Actuation, Motion Control and Optimization (SAMCON), Tokyo (Japan); 2018-03-06 -- 2018-03-09}, keywords = {Electromagnetic actuators, high-precision applications, finite element method}, numpages = {6} }
- S. Ito, S. Troppmair, F. Cigarini, and G. Schitter, Hybrid Reluctance Actuator for High-speed Scanning with Nanometer Resolution, in Proceedings of the IEEJ International Workshop on Sensing, Actuation, Motion Control and Optimization (SAMCON), 2018.
[BibTex]@InProceedings{TUW-268844, author = {Ito, Shingo and Troppmair, Stefan and Cigarini, Francesco and Schitter, Georg}, title = {Hybrid Reluctance Actuator for High-speed Scanning with Nanometer Resolution}, booktitle = {Proceedings of the IEEJ International Workshop on Sensing, Actuation, Motion Control and Optimization (SAMCON)}, year = {2018}, note = {Vortrag: IEEJ International Workshop on Sensing, Actuation, Motion Control and Optimization (SAMCON), Tokyo (Japan); 2018-03-06 -- 2018-03-09}, numpages = {6} }
- J. Schlarp, E. Csencsics, S. Ito, and G. Schitter, Design and Evaluation of a 3D Printed Flexure for a Fast Steering Mirror, in Proceedings of the 2018 Summer Topical Meeting, Advancing Precision in Additive Manufacturing, 2018.
[BibTex] [Download]@InProceedings{TUW-271207, author = {Schlarp, Johannes and Csencsics, Ernst and Ito, Shingo and Schitter, Georg}, title = {Design and Evaluation of a 3D Printed Flexure for a Fast Steering Mirror}, booktitle = {Proceedings of the 2018 Summer Topical Meeting, Advancing Precision in Additive Manufacturing}, year = {2018}, note = {Vortrag: ASPE and EUSPEN Summer Topical Meeting, Advancing Precision in Additive Manufacturing, Berkeley (USA); 2018-07-22 -- 2018-07-25}, numpages = {5}, }
- E. Csencsics and G. Schitter, Parametric PID Controller Tuning for a Fast Steering Mirror, in Proceedings of the 1st IEEE Conference on Control Technology and Applications (CCTA2017), 2017.
[BibTex] [Download]@InProceedings{TUW041020174, author = {Csencsics, E. and Schitter, G.}, title = {Parametric PID Controller Tuning for a Fast Steering Mirror}, booktitle = {Proceedings of the 1st IEEE Conference on Control Technology and Applications (CCTA2017)}, doi = {10.1109/CCTA.2017.8062697}, numpages = {6}, year = {2017} }
- E. Csencsics and G. Schitter, Design of a phase-locked-loop-based control scheme for Lissajous-trajectory scanning of fast steering mirrors, in Proceedings of the American Control Conference (ACC), 2017, 2017.
[BibTex] [Download]@InProceedings{TUW-041020175, author = {Csencsics, Ernst and Schitter, Georg}, title = {Design of a phase-locked-loop-based control scheme for Lissajous-trajectory scanning of fast steering mirrors}, booktitle = {Proceedings of the American Control Conference (ACC), 2017}, year = {2017}, numpages = {6}, doi = {10.23919/ACC.2017.7963176}, note = {Vortrag: American Control Conference (ACC), 2017, Seattle (USA); 2017-05-24 -- 2017-05-26} }
- E. Csencsics, J. Schlarp, and G. Schitter, Bandwidth extension of hybrid-reluctance-force-based tip/tilt system by reduction of eddy currents, in Proceedings of the 2017 IEEE International Conference on Advanced Intelligent Mechatronics (AIM2017), 2017, pp. 1167-1172.
[BibTex] [Download]@InProceedings{TUW041020173, author = {Csencsics, E. and Schlarp, J. and Schitter, G.}, title = {Bandwidth extension of hybrid-reluctance-force-based tip/tilt system by reduction of eddy currents}, booktitle = {Proceedings of the 2017 IEEE International Conference on Advanced Intelligent Mechatronics (AIM2017)}, year = {2017}, pages = {1167-1172}, doi = {10.1109/AIM.2017.8014176} }
- F. Cigarini, E. Csencsics, R. Saathof, and G. Schitter, Design of Tuneable Damping for Precision Positioning of a Two-Body System, in Proceedings of the 7th IFAC Symposium on Mechatronic Systems, 2016, p. 222–227.
[BibTex] [Download]@InProceedings{TUW-251116, author = {Cigarini, Francesco and Csencsics, Ernst and Saathof, Rudolf and Schitter, Georg}, title = {Design of Tuneable Damping for Precision Positioning of a Two-Body System}, booktitle = {Proceedings of the 7th IFAC Symposium on Mechatronic Systems}, year = {2016}, pages = {222--227}, note = {Posterpr{\"a}sentation: 7th IFAC Symposium on Mechatronic Systems {\&} 15th Mechatronics Forum International Conference, Loughborough (Vereinigte K{\"o}nigreich); 2016-09-05 -- 2016-09-08}, doi = {10.1016/j.ifacol.2016.10.554}, keywords = {Two-body systems, precision positioning, damping} }
- E. Csencsics, R. Saathof, and G. Schitter, Design of a Dual-Tone Controller for Lissajous-based Scanning of Fast Steering Mirrors, in Proceeding of the 2016 American Control Conference, 2016, p. 461–466.
[BibTex] [Download]@InProceedings{TUW-251547, author = {Csencsics, Ernst and Saathof, Rudolf and Schitter, Georg}, title = {Design of a Dual-Tone Controller for Lissajous-based Scanning of Fast Steering Mirrors}, booktitle = {Proceeding of the 2016 American Control Conference}, year = {2016}, pages = {461--466}, note = {Vortrag: American Control Conference 2016, Boston (USA); 2016-07-06 -- 2016-07-08}, doi = {10.1109/ACC.2016.7524957} }
Project Partners
Funding
- Christian Doppler Research Association
- The Austrian Federal Ministry for Digital and Economic Affairs
- The National Foundation for Research, Technology and Development
01.09.2015 Scanning optical point- and line-sensor (SOS)
Project focus
- Development of scanning systems with different optical sensors for 3D imaging
- High-speed, high-precision motion control of scanners for imaging
- Data acquisition system to accurately reconstruct 3D images
Description
In order to optimize production settings and inspect products at factories for high productivity and reliability, surface properties of the products can be evaluated by three dimensional (3D) measurements. For these applications, optical sensors are ideal for their high-speed non-contact and accurate measurements, such as laser triangulation sensors and polychromatic confocal sensors for displacement measurement, as well as colorimeters and spectrophotometers for color sensing, as shown in Fig. 1. To generate 3D measurement data, such sensors are moved with respect to the products for scanning. However, currently used methods have limited performance on measurement rage, scanning speed, motion precision, or flexibility.
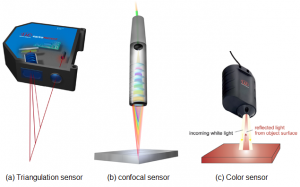
Different types of optical sensors targeted for the scanning optical-point and -line systems.
To overcome the limitation for better productivity and reliability of production in this project, a rotating or steering mirror scans the sensor’s optical point or line over a product surface, targeting triangulation, confocal, and color sensors.
Scanning triangulation sensor system
Laser triangulation sensors are one of the most commonly used optical sensors in dimensional metrology and quality control tasks, due to their large measurement range as well as their high resolution. In order to precisely obtain the distance between sample and sensor, the diffusely scattered laser light spot from the sample must be projected sharply onto the detector, which can only be realized by fulfilling the imaging condition. Figure 2 shows an optical scanning triangulation sensor system, which manipulates only the illumination path of the sensor, such that a fast steering mirror (FSM) with a small aperture size can be used, enabling a high scan speed. However, the imaging condition could be violated, through the scanning motion. By placing the FSM on the intersection line of the lens and detector plane, the imaging condition is satisfied at each measurement point. As can be observed in Fig. 2(a), the position of the intersection line can be changed by inserting a static mirror in the optical path, such that the FSM can be placed elsewhere.
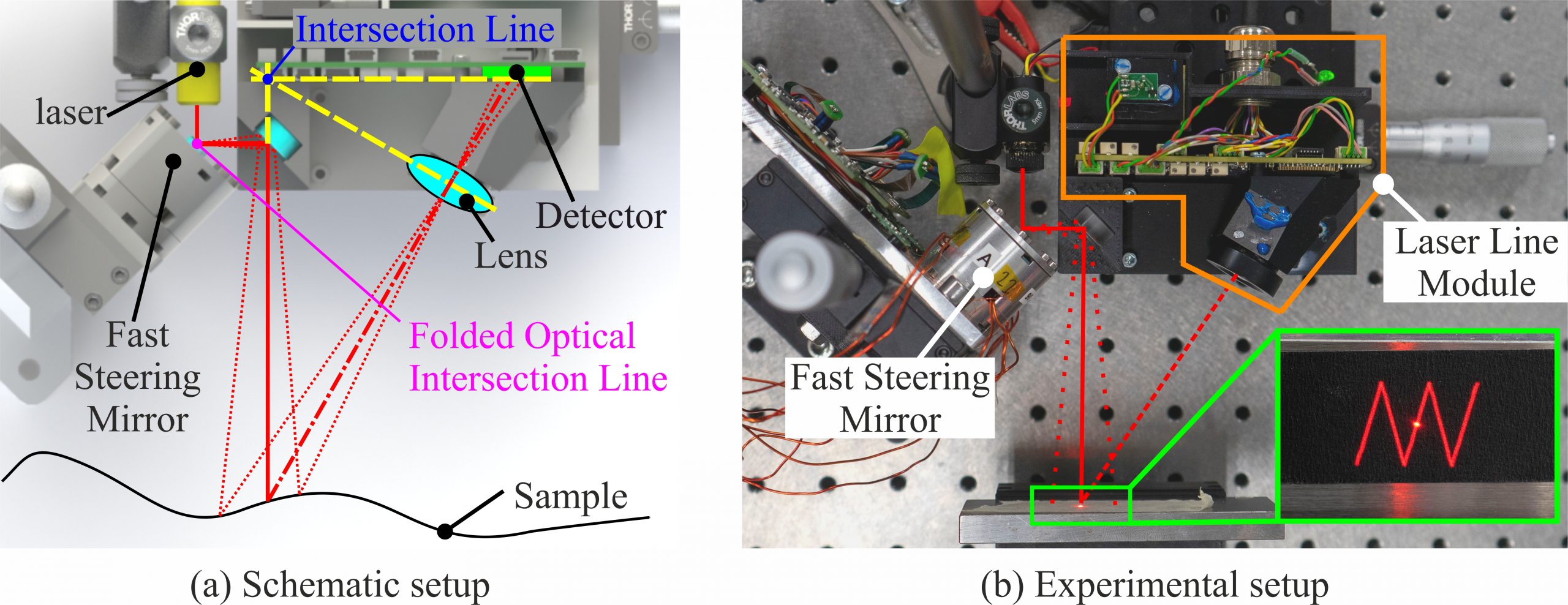
Schematic (a) and experimental (b) setup of the scanning point sensor system. The illumination path is manipulated with a compact HRA FSM at the intersection line to maintain the imaging condition.
To scan the area of interest, appropriate scan patterns are required. Most commonly raster scan trajectories are employed, which generate an image with a uniform spatial resolution. Lately Lissajous-based scan trajectories have been utilized for precision scanning systems. Due to the multi-resolution property, an early overview of the complete scan area is generated and continuously refined. Depending on the application, the raster or Lissajous scan trajectory prove advantageous.
Figure 3 depicts the measurement results of the optical scanning system and a conventional mechanical scanning system. The measured height of the hollow cylinder is comparable between the two scanning methods (optical 4.44 mm, mechanical 4.493 mm). However, the measurement time can be reduced from 67 minutes to 10 seconds through the optical scan, which is reduction by a of 400.
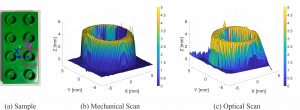
Measurement result. (a) shows the sample and selected area of interest. (b) and (c) show the measured surface profile of the mechanical and optical scanning triangulation sensor system.
Scanning chromatic confocal sensor system
Fig. 4 shows a photograph of a scanning system for an off-the-shelf chromatic confocal displacement sensor, which is well-calibrated and reliable. The optical point of the sensor scans a sample for topography imaging. For raster scanning of the optical point, the sample is moved by a linear stage. Because its mover is relatively large and heavy, dependent on the sample, such a conventional method restricts the achievable scanning speed. As a result, a long measurement time is typically required. Therefore, for the fast lateral scanning axis of raster scanning, the optical point is scanned by a galvanometer scanner that rotates a mirror. This enables to increase the scanning speed by moving neither the sensor nor the sample but the optical path along the fast scan axis.
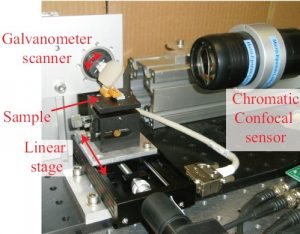
Scanning system that integrates an off-the-shelf chromatic confocal displacement sensor [S. Ito et al., in Proceedings of Summer Topical Meeting, Advancing Precision in Additive Manufacturing, p. 226–231, 2018].
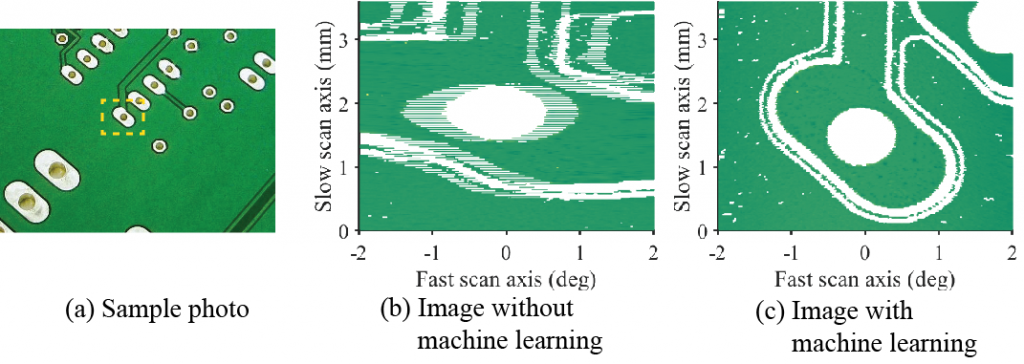
Sample and reconstructed images: (a) photograph of a sample and reconstructed images (b) without and (c) with machine learning [E. Csencsics et al., E&I, 135(6), p. 382–388, 2018].
Scanning color sensor system
To correctly obtain the color of a surface, a precise alignment between the color sensor and the sample is necessary. State of the art color sensors are ether contact based, which could impair the surface of the sample during the measurement, or non-contact, such that several additional external sensors are necessary to align the sensor with respect to the sample. By scanning the optical path of a non-contact color sensor the orientation between sensor and sample can be changed. Figure 6 depicts the experimental setup of the scanning color sensor system, which consists out of a fast steering mirror and a color sensor. To manipulate the distance between the sample and sensor a motorized stage is used.
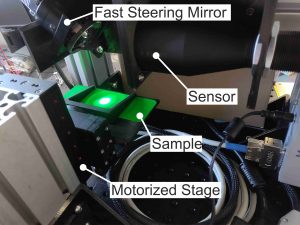
The optical path of an off-the-shelf color sensor is scanned by a fast steering mirror.
The measurement result of a RAL color card (RAL5026) is depicted in Fig. 7. As can be observed the brightness value L* has an extrema at an angular position of θx = 0° and θy = 0°, which corresponds to the correct orientation between sensor and sample. The measurement results of a* and b* can not be used for the alignment, since the position of their extrema’s is influenced by the measured color. Figure 7 also depicts the measurement results for various distances between sensor and sample. The brightness value L* has a maximum at a distance of z = 33 mm, which corresponds to the correct distance between sensor and sample, such that the correct alignment can be observed without any additional sensors.
Measurement results of a RAL color card for various positions and orientations. The correct alignment can be observed with the brightness value L*.
Applications
- In-line metrology
- Product inspection
- 3D imaging
Related publications
- J. Schlarp, E. Csencsics, and G. Schitter, Design and evaluation of an integrated scanning laser triangulation sensor, Mechatronics, vol. 72, p. 102453, 2020.
[BibTex] [Download]@article{TUW-290944, author = {Schlarp, Johannes and Csencsics, Ernst and Schitter, Georg}, title = {Design and evaluation of an integrated scanning laser triangulation sensor}, journal = {Mechatronics}, year = {2020}, volume = {72}, pages = {102453}, doi = {10.1016/j.mechatronics.2020.102453}, keywords = {Optical sensing and sensors, 3D sensorLaser sensor, Fast steering mirror, System analysis and design} }
- J. Schlarp, E. Csencsics, and G. Schitter, Optical scanning of a laser triangulation sensor for 3D imaging, IEEE Transactions on Instrumentation and Measurement, vol. 69, iss. 6, p. 3606–3613, 2020.
[BibTex] [Download]@article{TUW-282494, author = {Schlarp, Johannes and Csencsics, Ernst and Schitter, Georg}, title = {Optical scanning of a laser triangulation sensor for 3D imaging}, journal = {IEEE Transactions on Instrumentation and Measurement}, year = {2020}, volume = {69}, number = {6}, pages = {3606--3613}, doi = {10.1109/TIM.2019.2933343}, keywords = {Precision engineering, Optical sensors, Sensor Systems, Metrology, Optical devices, Ray tracing, Linear feedback control systems} }
- E. Csencsics, S. Ito, J. Schlarp, and G. Schitter, System Integration and Control for 3D Scanning Laser Metrology, IEEJ Journal of Industry Applications, vol. 8, iss. 2, 2019.
[BibTex] [Download]@Article{TUW-272918, author = {Csencsics, Ernst and Ito, Shingo and Schlarp, Johannes and Schitter, Georg}, title = {System Integration and Control for 3D Scanning Laser Metrology}, journal = {IEEJ Journal of Industry Applications}, year = {2019}, volume = {8}, number = {2}, note = {eingeladen}, doi = {10.1541/ieejjia.8.207}, keywords = {Mechatronic imaging systems, system integration, scanning laser metrology, model based control, iterative learning control}, numpages = {11} }
- J. Schlarp, E. Csencsics, and G. Schitter, Scanning laser triangulation sensor geometry maintaining imaging condition, in Proceedings of the Joint Conference 8th IFAC Symposium on Mechatronic Systems (MECHATRONICS 2019), and 11th IFAC Symposium on Nonlinear Control Systems (NOLCOS 2019), 2019.
[BibTex] [Download]@InProceedings{TUW-281665, author = {Schlarp, Johannes and Csencsics, Ernst and Schitter, Georg}, title = {Scanning laser triangulation sensor geometry maintaining imaging condition}, booktitle = {Proceedings of the Joint Conference 8th IFAC Symposium on Mechatronic Systems (MECHATRONICS 2019), and 11th IFAC Symposium on Nonlinear Control Systems (NOLCOS 2019)}, year = {2019}, volume = {52/15}, note = {Vortrag: Joint Conference 8th IFAC Symposium on Mechatronic Systems (MECHATRONICS 2019), and 11th IFAC Symposium on Nonlinear Control Systems (NOLCOS 2019), Wien; 2019-09-04 -- 2019-09-06}, doi = {10.1016/j.ifacol.2019.11.691}, journal = {IFAC-PapersOnLine/Elsevier}, keywords = {Absolute measurement, Precision measurements, 3D Sensor, Laser Sensor, Fast Steering Mirror, Optical Sensing and Sensors, System Design, Scheimpflug Condition}, numpages = {6}, }
- E. Csencsics, S. Ito, J. Schlarp, and G. Schitter, Hochpräzise roboterbasierte 3D-In-Prozess-Messtechnik, E&I Elektrotechnik und Informationstechnik, vol. 135, iss. 6, p. 382–388, 2018.
[BibTex]@Article{TUW-272940, author = {Csencsics, Ernst and Ito, Shingo and Schlarp, Johannes and Schitter, Georg}, title = {Hochpr{\"a}zise roboterbasierte 3D-In-Prozess-Messtechnik}, journal = {E{\&}I Elektrotechnik und Informationstechnik}, year = {2018}, volume = {135}, number = {6}, pages = {382--388}, doi = {10.1007/s00502-018-0636-1}, keywords = {In-Prozess-Messtechnik; optische Sensoren; 3D-Messtechnik; opto-mechatronische Systeme; Systemintegration} }
- J. Schlarp, E. Csencsics, and G. Schitter, Influence of Scheimpflug condition on measurements of a scanning laser line sensor for 3D imaging, Journal of Physics: Conference Series, vol. 1065, 2018.
[BibTex] [Download]@Article{TUW-273521, author = {Schlarp, Johannes and Csencsics, Ernst and Schitter, Georg}, title = {Influence of Scheimpflug condition on measurements of a scanning laser line sensor for 3D imaging}, journal = {Journal of Physics: Conference Series}, year = {2018}, volume = {1065}, doi = {10.1088/1742-6596/1065/14/142006}, }
- J. Schlarp, E. Csencsics, and G. Schitter, Optical scanning of laser line sensors for 3D imaging, Applied Optics, vol. 57, iss. 18, p. 5242–5248, 2018.
[BibTex] [Download]@Article{TUW-271204, author = {Schlarp, Johannes and Csencsics, Ernst and Schitter, Georg}, title = {Optical scanning of laser line sensors for 3D imaging}, journal = {Applied Optics}, year = {2018}, volume = {57}, number = {18}, pages = {5242--5248}, doi = {10.1364/AO.57.005242}, keywords = {Three-dimensional sensing; Industrial optical metrology; Optomechanics; Laser sensors; Mirrors; Optical sensing and sensors}, }
- J. Schlarp, E. Csencsics, and G. Schitter, Feature detection and scan area selection for 3D laser scanning sensors, in 2018 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, 2018.
[BibTex] [Download]@InProceedings{TUW-271205, author = {Schlarp, Johannes and Csencsics, Ernst and Schitter, Georg}, title = {Feature detection and scan area selection for 3D laser scanning sensors}, booktitle = {2018 IEEE/ASME International Conference on Advanced Intelligent Mechatronics}, year = {2018}, note = {Vortrag: 2018 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Auckland (New Zealand); 2018-07-09 -- 2018-07-12}, numpages = {6}, doi = {10.1109/AIM.2018.8452235}, }
- S. Ito, M. Poik, E. Csencsics, J. Schlarp, and G. Schitter, Scanning Chromatic Confocal Sensor for Fast 3D Surface Characterization, in Proceedings of the 2018 Summer Topical Meeting, Advancing Precision in Additive Manufacturing, 2018, p. 226–231.
[BibTex]@InProceedings{TUW-270906, author = {Ito, Shingo and Poik, Matthias and Csencsics, Ernst and Schlarp, Johannes and Schitter, Georg}, title = {Scanning Chromatic Confocal Sensor for Fast 3D Surface Characterization}, booktitle = {Proceedings of the 2018 Summer Topical Meeting, Advancing Precision in Additive Manufacturing}, year = {2018}, pages = {226--231}, note = {Vortrag: ASPE and EUSPEN Summer Topical Meeting, Advancing Precision in Additive Manufacturing, Berkeley (USA); 2018-07-22 -- 2018-07-25} }
- S. Ito, H. W. Yoo, and G. Schitter, Comparison of Modeling-free Learning Control Algorithms for Galvanometer Scanner’s Periodic Motion, in Proceedings of the IEEE/ASME International conference on advanced intelligent mechatronics, 2017.
[BibTex]@InProceedings{TUW-260451, Title = {Comparison of Modeling-free Learning Control Algorithms for Galvanometer Scanner's Periodic Motion}, Author = {Ito, Shingo and Yoo, Han Woong and Schitter, Georg}, Booktitle = {Proceedings of the IEEE/ASME International conference on advanced intelligent mechatronics}, Year = {2017}, Doi = {10.1109/AIM.2017.8014207} }
Videos
- Optically scanned laser-line sensor
- Confocal chromatic sensor with an actively tilted lens for 3D measurement
Project Partners
Funding
- Christian Doppler Research Association
- The Austrian Federal Ministry for Digital and Economic Affairs
- The National Foundation for Research, Technology and Development
01.09.2015 Characterization of highly divergent optics (DOC)
Project focus
- Wavefront Measurement Device for Highly Divergent Optics
- Wavefront Stitching and Reconstruction from Segmented Measurements
- Automatic Characterization of an Optical Device
Description
Opto-mechatronic devices such as triangulation sensors or confocal chromatic sensors project focused light beams onto the surface of the measuring object. Assessing the properties of the focused beam is essential as they are directly related to the achievable measurement resolution and precision of the opto-mechatronic device. Such properties can be evaluated by measuring the optical aberrations of the focused beam, since they directly deliver information about the defects in the optical system. To characterize or to improve the optical system, an exact knowledge of the involved optical aberrations is therefore crucial.
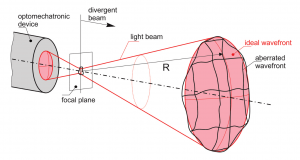
The focused spot produced by the mechatronic device can be examined by analyzing the resulting spherical wavefront.
One approach to derive the optical aberrations of an optical system is to measure the surface geometry of single components by surface profilers such as deflectometers, interferometers and tactile or non-tactile measuring machines, determining their relative alignment within the optical path and make use of simulation tools to obtain the aberrations of the entire optical system. With an increasing number of involved optical components, this approach becomes complex, time-consuming and does not allow a direct characterization of the optical quality after assembling the entire optical system.
Instead, measuring the wavefront of the focused beam emitted by the optical system allows to directly characterize the optical aberrations of the entire system, as depicted in Figure 1. A wavefront describes a surface composed of points of equal phase of the optical field within an optical wave. Each component inside the optical path contributes to the shape of the wavefront that can be measured by wavefront sensing devices. To determine the optical aberrations of the system, the measured wavefront is then compared to an ideal, aberration-free wavefront. Wavefront sensing is currently used in a whole variety of applications such as:
- optical shop testing to determine the quality of lenses,
- measuring the dynamic deformation of surfaces such as scanning mirrors,
- in production lines to characterize the surface topology of wafers, flat panels and glass sheets,
- in astronomy as part of a closed loop system to improve image quality, and
- in medical imaging for determining eye aberrations.
Scanning wavefront sensor
The research in this area also deals with a fundamental aspect of optics: The problem of directly assessing the shape of a light wave. The available tools – optical devices themselves – are not yet fit to deal with curved wavefronts. To overcome the limitations of the available sensor types they are integrated with high-precision positioning systems. By merging the wavefront data with the corresponding positioning and alignment data, a representation of the global wavefront can be achieved. The development of suitable reconstruction and stitching methods forms another central challenge of this research project.
Figure 2 depicts an experimental setup to investigate the properties of a scanning wavefront sensor. By repositioning and reorienting the sensor, its limitations concerning the opening angle of the wavefront under test can be circumvented.
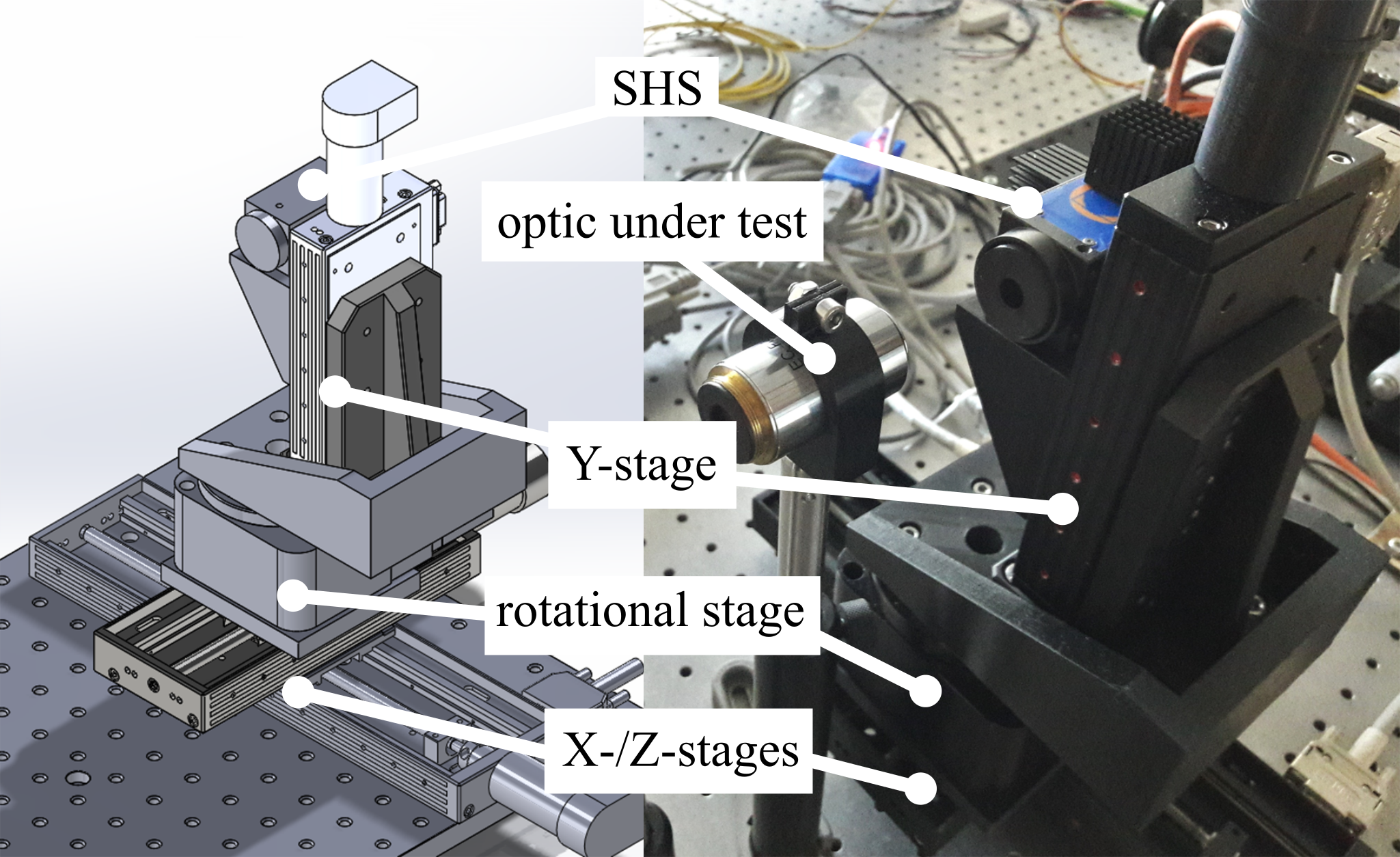
Shack-Hartmann sensor on a scanning setup.
Wavefront Reconstruction
With such a setup, a more or less arbitrary wavefront can be recorded by taking multiple, partially overlapping measurements. These measurements then have to be combined with the position data to form a representation of the global wavefront. Figure 3 shows a representation of such a curved wavefront which could not be acquired directly with a single, static sensor.
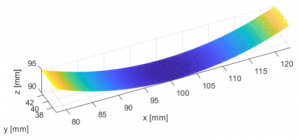
3D representation of a highly-divergent wavefront, reconstructed from 15 individual, partially overlapping measurements.
However, due to several positioning errors the sensor positions might be faulty which leads to a challenge of reconstructing the entire wavefront. Hence, sophisticated wavefront reconstruction algorithms have to be developed in order to get a well reconstructed wavefront despite these errors. Such algorithms mainly utilize estimation methods and digital image processing techniques like stitching, feature detection etc.
To facilitate the development of such algorithms a software that simulates the wavefront measurement with a Shack-Hartmann sensor is developed too (Figure 4).
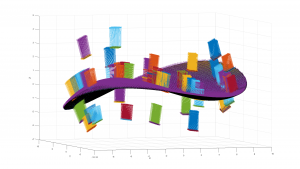
Simulation of measurement of a wavefront with a scanning Shack-Hartmann sensor.
Applications
- Characterization of freeform optical parts (e.g. modern smartphone lenses)
- Automatic characterization of optical components or assemblies
- In-line quality assurance
Related publications
- N. Berlakovich, M. Fuerst, E. Csencsics, and G. Schitter, Robust wavefront segment registration based on a parallel approach, Applied Optics, vol. 60, iss. 6, p. 1578–1586, 2021.
[BibTex] [Download]@article{TUW-295213, author = {Berlakovich, Nikolaus and Fuerst, Martin and Csencsics, Ernst and Schitter, Georg}, title = {Robust wavefront segment registration based on a parallel approach}, journal = {Applied Optics}, year = {2021}, volume = {60}, number = {6}, pages = {1578--1586}, doi = {10.1364/AO.413207} }
- M. Fuerst, E. Csencsics, N. Berlakovich, and G. Schitter, Automated Measurement of Highly Divergent Optical Wavefronts with a Scanning Shack-Hartmann Sensor, IEEE Transactions on Instrumentation and Measurement, vol. 70, 2021.
[BibTex] [Download]@article{TUW-291040, author = {Fuerst, Martin and Csencsics, Ernst and Berlakovich, Nikolaus and Schitter, Georg}, title = {Automated Measurement of Highly Divergent Optical Wavefronts with a Scanning Shack-Hartmann Sensor}, journal = {IEEE Transactions on Instrumentation and Measurement}, year = {2021}, volume = {70}, numpages = {9}, doi = {10.1109/TIM.2020.3038002}, keywords = {Shack-Hartmann wavefront sensor, Dynamic range extension, Optical metrology, Automatic optical inspection, Quality management, Error Budgeting} }
- M. Fuerst, N. Berlakovich, E. Csencsics, and G. Schitter, Self-Aligning Scanning Shack-Hartmann Sensor for Automatic Wavefront Measurements of High-NA Optics, in Proceedings of the IEEE International Instrumentation and Measurement Technology Conference (I2MTC 2020), 2020.
[BibTex] [Download]@inproceedings{TUW-289906, author = {Fuerst, Martin and Berlakovich, Nikolaus and Csencsics, Ernst and Schitter, Georg}, title = {Self-Aligning Scanning Shack-Hartmann Sensor for Automatic Wavefront Measurements of High-NA Optics}, booktitle = {Proceedings of the IEEE International Instrumentation and Measurement Technology Conference (I2MTC 2020)}, year = {2020}, numpages = {6}, doi = {10.1109/I2MTC43012.2020.9128499}, keywords = {Shack-Hartmann wavefront sensor, Dynamic range extension, Optical metrology, Automatic optical inspection, Quality management}, note = {Vortrag: IEEE International Instrumentation and Measurement Technology Conference Proceedings I2MTC (2020), Dubrovnik, Kroatien; 2020-05-25 -- 2020-05-28} }
- M. Fuerst and G. Schitter, Scanning Wavefront Sensor for Measurement of Highly Divergent Wavefronts, in Proceedings of the Joint Conference 8th IFAC Symposium on Mechatronic Systems (MECHATRONICS 2019), and 11th IFAC Symposium on Nonlinear Control Systems (NOLCOS 2019), 2019.
[BibTex] [Download]@inproceedings{TUW-281663, author = {Fuerst, Martin and Schitter, Georg}, title = {Scanning Wavefront Sensor for Measurement of Highly Divergent Wavefronts}, booktitle = {Proceedings of the Joint Conference 8th IFAC Symposium on Mechatronic Systems (MECHATRONICS 2019), and 11th IFAC Symposium on Nonlinear Control Systems (NOLCOS 2019)}, year = {2019}, journal = {IFAC-PapersOnLine/Elsevier}, volume = {52/15}, numpages = {6}, doi = {10.1016/j.ifacol.2019.11.644}, keywords = {Freeform optics, optical metrology, wavefront measurement, scanning system, Shack-Hartmann sensor, surface metrology}, note = {Vortrag: Joint Conference 8th IFAC Symposium on Mechatronic Systems (MECHATRONICS 2019), and 11th IFAC Symposium on Nonlinear Control Systems (NOLCOS 2019), Wien; 2019-09-04 -- 2019-09-06} }
- M. Fuerst, S. Unger, S. Ito, and G. Schitter, Wavefront measurement based feedback control for automatic alignment of a high-NA optical system, Journal of Physics: Conference Series, vol. 1065, 2018.
[BibTex] [Download]@article{TUW-273524, author = {Fuerst, Martin and Unger, Severin and Ito, Shingo and Schitter, Georg}, title = {Wavefront measurement based feedback control for automatic alignment of a high-NA optical system}, journal = {Journal of Physics: Conference Series}, year = {2018}, volume = {1065}, numpages = {4}, doi = {10.1088/1742-6596/1065/3/032001} }
- M. Fuerst, S. Unger, S. Ito, and G. Schitter, Wavefront measurement based feedback control for automatic alignment of a high-NA optical system, in XXII World Congress of the International Measurement Confederation (IMEKO), 2018.
[BibTex] [Download]@inproceedings{TUW-271223, author = {Fuerst, Martin and Unger, Severin and Ito, Shingo and Schitter, Georg}, title = {Wavefront measurement based feedback control for automatic alignment of a high-NA optical system}, booktitle = {XXII World Congress of the International Measurement Confederation (IMEKO)}, year = {2018}, numpages = {4}, note = {Vortrag: XXII World Congress of the International Measurement Confederation (IMEKO), Belfast (UK); 2018-09-03 -- 2018-09-06} }
- E. Csencsics, S. Ito, M. Fuerst, F. Cigarini, and G. Schitter, Christian Doppler Laboratory Precision Engineering for Automated In-line Metrology, in 1st GMAR workshop, 2017.
[BibTex]@Conference{TUW-0612172, author = {Csencsics, E. and Ito, S. and Fuerst, M. and Cigarini, F. and Schitter, G.}, title = {Christian Doppler Laboratory Precision Engineering for Automated In-line Metrology}, booktitle = {1st GMAR workshop}, year = {2017} }
Project Partners
Funding
- Christian Doppler Research Association
- The Austrian Federal Ministry for Digital and Economic Affairs
- The National Foundation for Research, Technology and Development
01.07.2015 PDZ Learn Motion
Project focus
- Review of existing ILC algorithms Review of existing ILC algorithms
- Implement ILC algorithms on Programmable Logic Controller (PLC)
- Testing the algorithms on a gantry robot
Description
The improvement of the process changeover of modular manipulators offers enormous potential for process optimization in small-series production. Current handling devices can not be converted quickly to new products and production processes sufficiently. Especially for SMEs, the cost of retrofitting the production plant usually exceed the benefits, which is why they cannot compete in the market.
In this project specifically the aspect of modularity and rapidly (re-) configurability of handling systems for small series production are examined. The aim of this project is to investigate and develop methods that allow non-automation experts to configure multi-axis handling device and put them into operation with little effort. They will thereby be able to construct specialized handling systems from standard automation components, such as linear axes, pneumatic cylinders, rotary actuators and commercial control platforms (e.g.: PLC, industrial PC). Especially iterative learning control is considered for use, as this kind of control is particular useful in such applications, as on the one hand they are able to carry the usual repetitive production tasks more quickly than conventional control, and on the other hand, can accurately comply with poor or unknown models and parameters and precisely track the desired trajectory. These properties lead to rapid start-up, increased throughput, and minimal waste in small-series production.
Automation and Industrial Control Systems
In this project multiple Iterative Learning Control (ILC) algorithms have been reviewed. Two common ways to implement an ILC have been realized for the test system. The first method is the so called inversion based ILC. After an identification of the plant the ILC starts with an inversion of the plant. If the plant dynamics is exactly known then the transfer function from input to output equals one. To suppress noise and model errors a filter has to be used to stabilize the ILC.
The second method is the norm optimal ILC. This method optimizes a cost functional which weights the error of the output, the input and the change of the input signal.
The goal of this project is to implement ILC directly on standard PLC’s for reconfigurable robotic systems. As PLC a Beckhoff software PLC called TwinCAT is used. To verify the implemented algorithm a gantry robot of Figure 1 is used. To calculate the ILC on the PLC a three phase model is developed.
- Offline phase: In this phase all required parameters out of the model are calculated and the trajectory generation is done. This has to be done just once upfront.
- In-between trials: After completing one iteration the ILC update for the next iteration can be done.
- Online phase: The before calculated update is applied to the next trajectory.
Gantry robot which should be controlled by the PLC.
To determine the performance of the developed system a trajectory is generated form 200 mm to 600 mm. The ILC starts with an intentional model error and is compared to a standard Beckhoff PID controller.
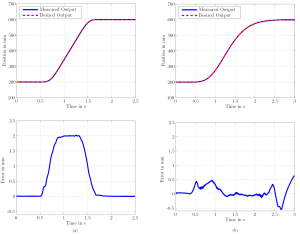
Position and error in case of (a) Beckhoff PID controller and (b) Norm optimal ILC
It can be seen that the norm optimal ILC reduces the maximum error of 2 mm to 0.62 mm after 100 Iterations. Because of the intentional model error the ILC is in the first iterations poorer than the feedback control. After the 26th iteration the break even point is reached, which means, that the error of the ILC is smaller than the feedback control.
Videos
Applications
- Automation technology
- Iterative learning control
- Flexible manufacturing
Related publications
- M. Steinegger, N. Plaschka, M. Melik-Merkumians, and G. Schitter, A Framework for Modular and Distributable Control of Reconfigurable Robotic Systems, in Proceedings of the IEEE International Conference on Industrial Technology, 2016, p. 848–853.
[BibTex]@InProceedings{TUW-248717, Title = {A Framework for Modular and Distributable Control of Reconfigurable Robotic Systems}, Author = {Steinegger, Michael and Plaschka, Nikolaus and Melik-Merkumians, Martin and Schitter, Georg}, Booktitle = {Proceedings of the IEEE International Conference on Industrial Technology}, Year = {2016}, Note = {Vortrag: 2016 IEEE International Conference on Industrial Technology, Taipei, Taiwan; 2016-03-14 -- 2016-03-17}, Pages = {848--853}, Doi = {10.1109/ICIT.2016.7474862} }
- M. Bibl, M. Robin, M. Steinegger, and G. Schitter, Framework for Implementation of Iterative Learning Control on Programmable Logic Controllers, in Proceedings of 2016 IEEE 21th Conference on Emerging Technologies & Factory Automation, 2016.
[BibTex]@InProceedings{TUW-251133, Title = {Framework for Implementation of Iterative Learning Control on Programmable Logic Controllers}, Author = {Bibl, Matthias and Robin, Michael and Steinegger, Michael and Schitter, Georg}, Booktitle = {Proceedings of 2016 IEEE 21th Conference on Emerging Technologies {\&} Factory Automation}, Year = {2016}, Note = {Posterpr{\"a}sentation: 21st IEEE International Conference on Emerging Technologies and Factory Automation (ETFA 2016), Berlin; 2016-09-06 -- 2016-09-09}, Doi = {10.1109/ETFA.2016.7733619}, Eid = {271}, ISBN = {978-1-5090-1314-2}, Keywords = {ILC, PLC,Norm-optimal, robot}, Numpages = {4} }
- M. Robin, Computational Efficient Implementation of Iterative Learning Control on a Programmable Logic Controller, 2017.
[BibTex]@MastersThesis{TUW-227240, Title = {Computational Efficient Implementation of Iterative Learning Control on a Programmable Logic Controller}, Author = {Robin, M.}, School = {TU Wien}, Year = {2017} }
Funding
Financial support of the Austrian Research Promotion Agency (FFG) under grant no. 848623 is gratefully acknowledged.
08.06.2015 AssistMe
AssistMe develops and evaluates during a user-centered multistage process innovative means of interaction for programming and usage of a robot-based assistive system.
Central topic is the integration of users in the concept development where the interaction paradigms are defined as well as in the evaluation stage of the developed technology. AssistMe examines the applicability of haptic (force feedback) interaction technology with means of machine vision respectively with methods from the field of spatial augmented reality. Together with two industrial companies universal applicability of the developed methodologeis will be evaluated in two entirely different application scenarios. One field of application is the assembly of automotive comustion engines while the other UseCase treats the machining (polishing) of casting modls.
Partners
Profactor (coordinator)
BMW Motoren GmbH
GPN GmbH
Funding
FFG – 7. Ausschreibung Produktion der Zukunft nat. Projekte
08.06.2015 ALOOF
Autonomous Learning of the Meaning of Objects
ALOOF will enable robots to tap into the ever-growing amount of knowledge available on the Web, by learning from there about the meaning of previously unseen objects, expressed in a form that makes them applicable when acting in situated environments. By searching the Web, robots will be able to learn about new objects, their specific properties, where they might be stored and so forth. To achieve this, robots need a mechanism for translating between the representations used in their real-world experience and those on the Web.
The goal of ALOOF is to significantly advance the ability of today’s autonomous systems to adapt to ever changing, dynamic real world environments by enabling them to learn about the meaning of objects from resources accessible through the Web.
In ALOOF we will explicitly focus on objects and the knowledge gaps a service robot will encounter about them.
The fundamental contribution of ALOOF will be to enable robots to translate between the representations they use in their situated experience and those on the Web.
Partners
- University of Rome La Sapienza, Department of Computer, Control and Management Engineering “Antonio Ruberti”
- ALCOR – Vision, Perception and Learning Robotics Lab
Rome, Italy
Prof. Barbara Caputo - School of Computer Science, University of Birmingham, Birmingham, United Kingdom
Dr. Nick Hawes - INRIA Sophia Antipolis, Wimmics Team, France
Sophia Antipolis
Dr. Fabien Gandon - Technische Universität Wien
Vienna, Austria
Prof. Markus Vincze
Funding
Chist-era, FWF