Precision robotic inline metrology for freeform surfaces
Project focus
- 6DoF measurement platform with arbitrary operation orientation
- Integrated control strategies for dual sage-actuated robotic positioning and automated measurement procedures
- Conduct high precision 3D measurements on a moving object directly in a production line
Description
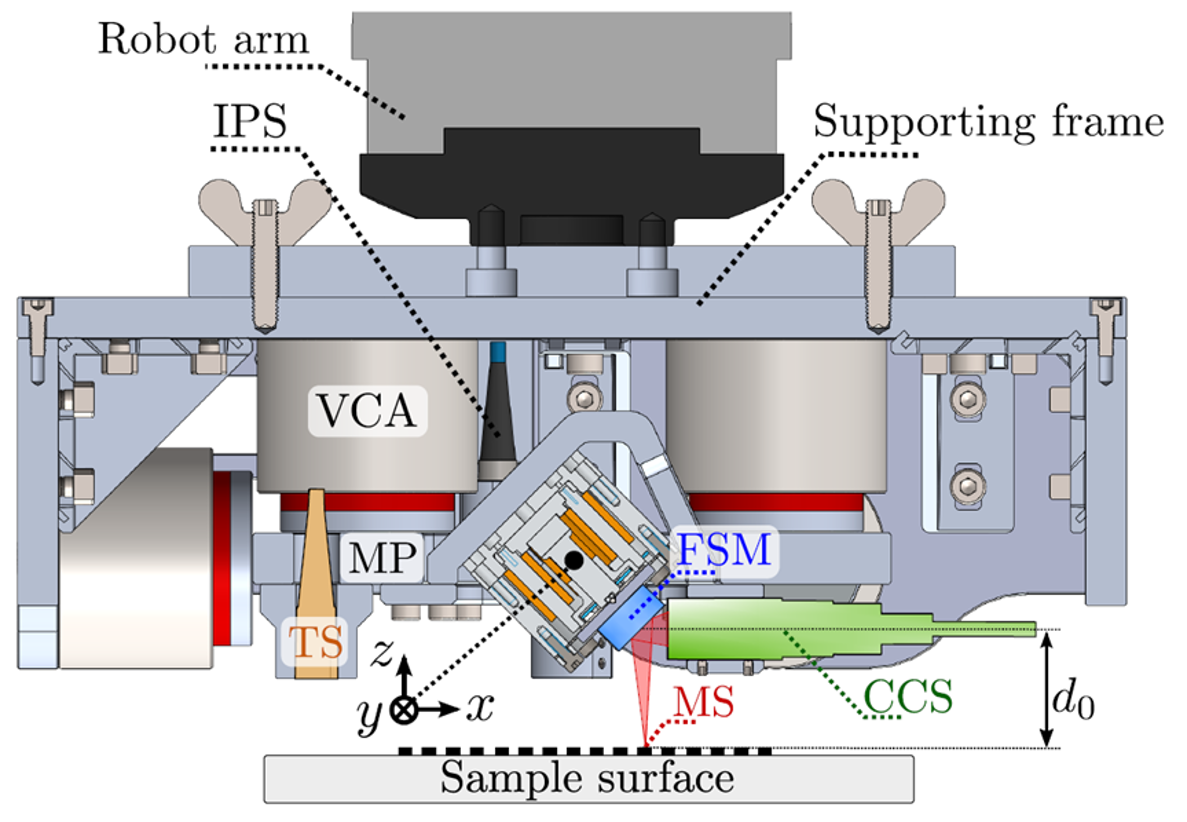
System conept of active vibration compensation enabling high precision robot-based surface measurements of free forms. A stiff link between the measurement tool and the sample surface is established by means of feedback control.
High precision in-line measurements are considered as a key factor for future industrial production. Particularly for surface measurements of free forms directly in a production line, flexible and versatile measurement systems are required. Robot-based measurement systems enable the required flexibility and are thus considered as a key factor. High-precision measurement systems, which operate at the micrometer level, are typically highly sensitive to vibrations and, therefore, usually applied in vibration-free laboratory environments. This is, however in complete contrary to the vibration-prone environment of an industrial manufacturing plant. Relative motion between the measurement tool and the sample in 6 DOFs is caused by environmental floor vibrations, disturbing measurements at the micrometer level.
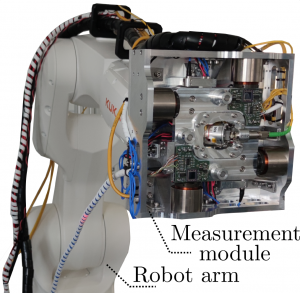
Within the scope of this project, a vibration compensating measurement module is developed. This module is used as an end effector and coarsely aligned by the robot arm. The actuated platform, which carries the high precision measurement tool, compensates for disturbing vibrations in 6 DoFs by means of feedback control. A stiff link between the 3D measurement tool and the sample is established, maintaining a constant alignment of the tool with respect to the sample surface. Using dual stage control strategies, the robot arm is repositioned, such that the measurement platform is maintained within its limited actuation range. In this way, the long-range tracking of moving samples is enabled.
The feasibility of the system concept has been shown for horizontal operation orientation in the project aim4np. The goal of this project is to enable contact-less high precision robot-based measurements of free form surfaces by a measurement module with orientation-independent system performance.
3D Measurement Module Design and Integration
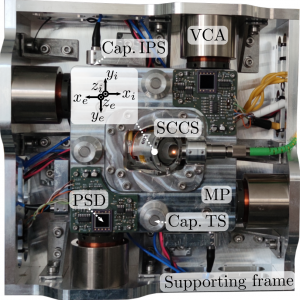
To mechanically decouple the measurement platform from the robot arm, (quasi-)zero stiffness actuation is desired. Therefore, eight voice coil actuators are utilized to levitate and actuated the platform in 6 DoFs within the airgap between coils and magnet housings. By use of FEM analysis tools, the structural stiffness of the platform is analyzed, aiming for a high position control bandwidth and vibration compensation capability. Good decoupling of the DoFs is ensured by a balanced design, avoiding unintended torsional motion through actuation and keeping the subsequent control effort at a low level. The system is deliberately over-actuated, providing high peak forces, and the arbitrary operation orientation of the entire system. An integrated sensor system determines the actual position of the moving platform with respect to the supporting frame, while tracking sensors are used to measure the distance and orientation between platform and sample.
By manipulating the optical path of a 1-D confocal chromatic sensor with a high performance 2-D fast steering mirror, 3-D imaging is enabled. Using a CMOS camera, calibration data is acquired for a precise image reconstruction. The developed 3-D tool is capable of performing fast overview images and high resolution scans of arbitrary region of interests. The lateral scan range is about 350µm x 250µm, with scan speeds of up to 1 frame per second. The achieved lateral and axial resolution is 2.5µm and 7nm, respectively.
Precision Motion Control
Model-based control techniques are applied to ensure a robust and high-performance positioning of the electro-magnetically actuated platform. A system model is built to decouple the MIMO plant, resulting in the implementation of a SISO controller for each DoF. A transition scheme is researched to operate the system in two different control modes, the stabilization of the platform with respect to the supporting frame and the tracking control of a sample surface.
To enable the long-range tracking of moving samples, dual stage control strategies are applied. The robot arm is repositioned, such that the measurement platform is maintained within its limited actuation range.
High-precision 3D measurements on moving samples
In case of disabled sample-tracking, relative motion corrupts the targeted 3D measurement. By enabling the sample-tracking controller, the contactless stiff link between the scanning confocal chromatic sensor and the sample, in this case a 20µm pitch grating, compensates the disturbing relative motion. In this way, 3D images of the moving sample are achieved with sub-µm precision.
Applications
- Inline measurement systems
- Robot-based precision measurement and manufacturing systems
Project Partners
Funding
Ansprechpartner
Univ.-Prof. Dipl.-Ing. Dr.sc.techn. Georg SchitterAssociate Prof. Dipl.-Ing. Dr.techn. Ernst Csencsics
ProjektmitarbeiterInnen
Dipl.-Ing. BSc. Daniel WertjanzAssociate Prof. Dipl.-Ing. Dr.techn. Ernst Csencsics