Whole Body Control
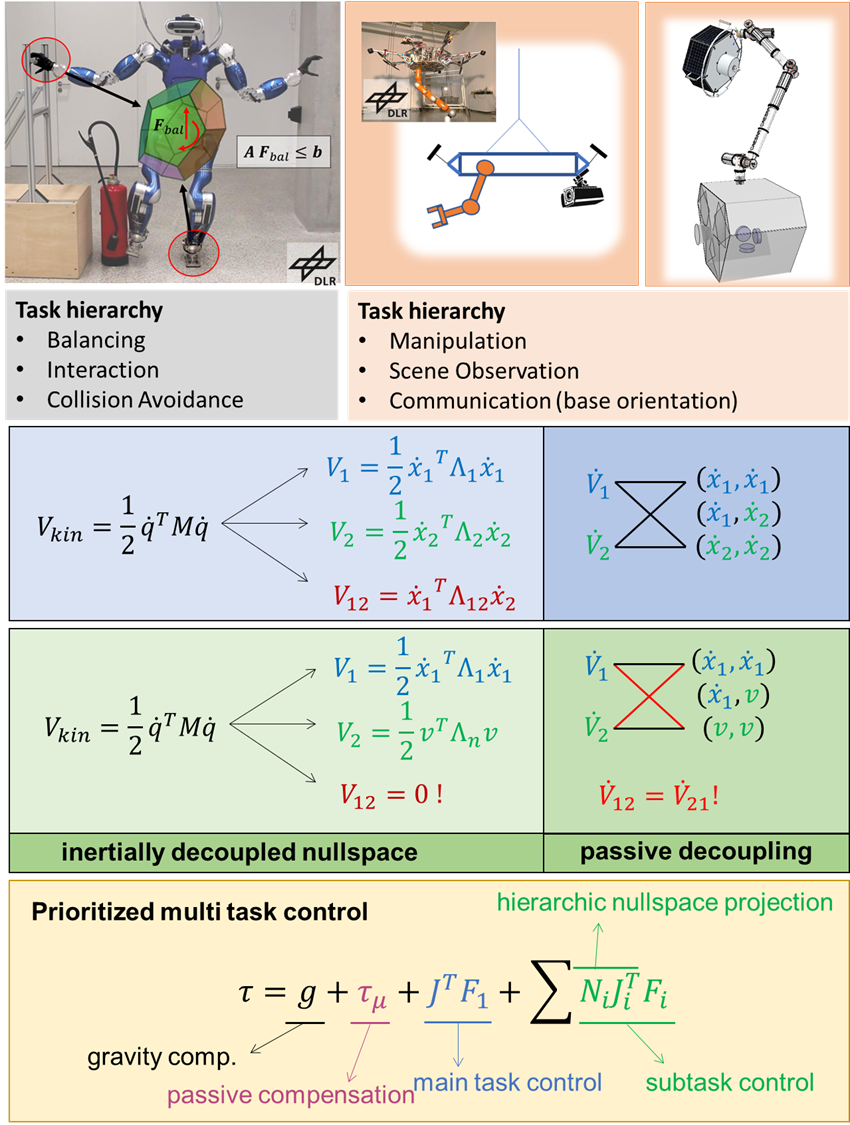
Whole-Body Control in robotics refers to the task to control a mobile manipulator with a locomotion and a manipulation subsystem by one unified control algorithms. Whole body control thus is closely related to the simultaneous control of multiple tasks, possibly with different task priorities. For example, for a humanoid robot such tasks could be
- Control of the motion of an end-effector
- Physical interaction and force control
- Collision avoidance
- Safety-related tasks
- Postural stability (such as a balancing task for a legged robot).
These tasks typically have different levels of importance (i.e. priorities), leading to hierarchical control approaches. Our research on whole-body control benefits from a system representation in which the task coordinates appear in an inertially decoupled form. As applications we consider mobile manipulator systems such as wheel-based and legged humanoids, orbital manipulators, and cable supported aerial manipulators.
In orbital manipulators, special emphasis is pointed towards the best use of the actuation system of the base satellite. In order to save fuel, the thruster actuation is avoided whenever it is possible to achieve the control goal only by the manipulator and the on-board reaction wheels (if present). Moreover, it turned out that a momentum-based control strategy that can lead to efficient controllers, when the requirements on the exact satellite positioning is relaxed.