Physical Interaction & Teleoperation
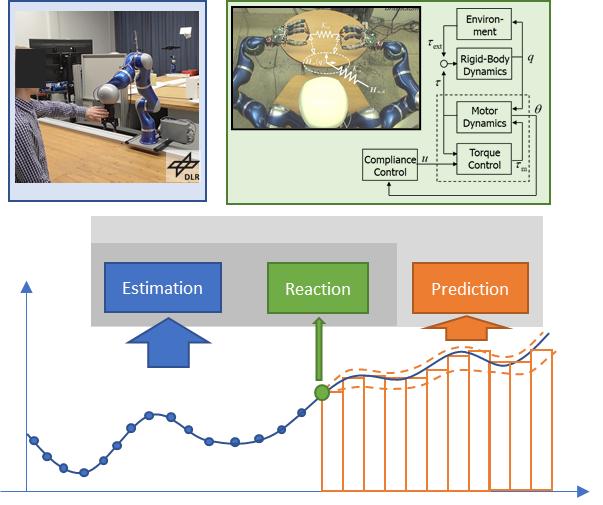
Many tasks for robotic systems involve a physical interaction of the robot and its environment or with humans. This is especially relevant for collaborative robots in industry or in service robotics applications. Our part research activities on this topic include the development of impedance and compliance control for torque-controlled robots, based on an elastic joint robot model. These algorithms are nowadays available of-the-shelf in several commercial collaborative manipulators such as KUKA’s iiwa or Franka Emika’s Panda robot.
Additional challenges appear in specific applications, like the operation of a manipulator on a non-rigid base, or in complex robotic systems with torque- and position-controlled subsystems. Or current research interest on interaction control covers novel applications of compliant motion control approaches as well as the combination with external sensing (force or vision). We believe that the combination with data-based algorithms offers new possibilities when the task is hard to model or when the manipulator dynamics itself has large uncertainty.
State of the art motion planning algorithms still do not fully utilize the capabilities of compliant control approaches. We believe that the integration of model-based predictions (MPC) will help to close the remaining gap between powerful motion planning and the existing reactive feedback control concepts in order to guarantee safe and reliable interaction with the environment and with humans.
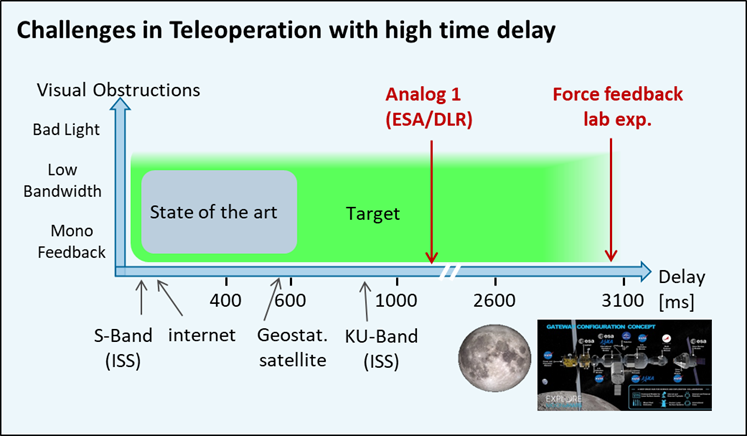
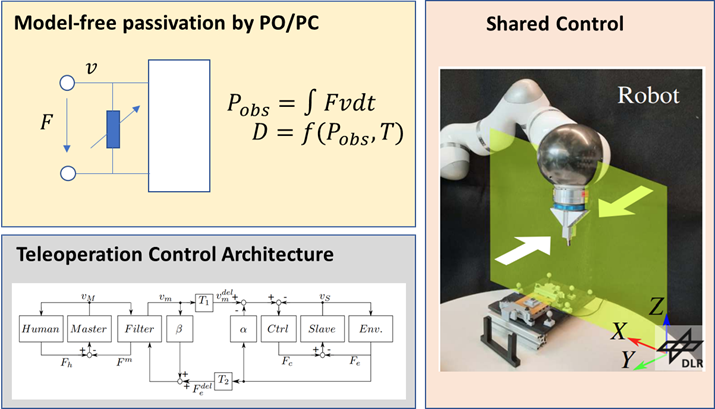
A unique interaction between a human user and the robot appears in teleoperation with force feedback. Any time delay in the communication has a significant impact on the stability and the performance of a teleoperation system. In our past research, we applied the PO/PC control framework for the passivation of teleoperation systems. The Po/PC essentially implements a variable damper, which is activated whenever a non-passive behavior of the system is observed. The original PO/PC formulation used the commanded force feedback and required additional drift compensation due to the transmission (and local integration) of velocity signals. Recent results showed that the use of measured force feedback offers additional opportunities to stabilize teleoperation systems with large time delays, as appear, e.g., in space robotics when teleoperating planetary robots from an orbiter (~1 s delay) or even in extreme cases when considering teleoperating a lunar robot from earth (~3s delay) [*].
The combination of teleoperation and autonomous behaviors in a shared control architecture allows to reduce the mental workload of the human user and becomes highly relevant in teleoperation scenarios with large delays or when the user can command only a limited number of degrees of freedom.
References
[*] Michael Panzirsch, Aaron Pereira, Harsimran Singh, Bernhard Weber, Edmundo Ferreira, Andrei Gherghescu, Lukas Hann, Emiel den Exter, Frank van der Hulst, Levin Gerdes, Leonardo Cencetti, Kjetil Wormnes, Jessica Grenouilleau, William Carey, Ribin Balachandran, Thomas Hulin, Christian Ott, Daniel Leidner, Alin Albu-Schaeffer, Neal Y. Lii, Thomas Krueger, Exploring Planet Geology through Force-Feedback Tele-Manipulation from Orbit, Science Robotics, 2022, DOI: 10.1126/scirobotics.abl6307.