Control of Elastic Robots (Soft Robotics)
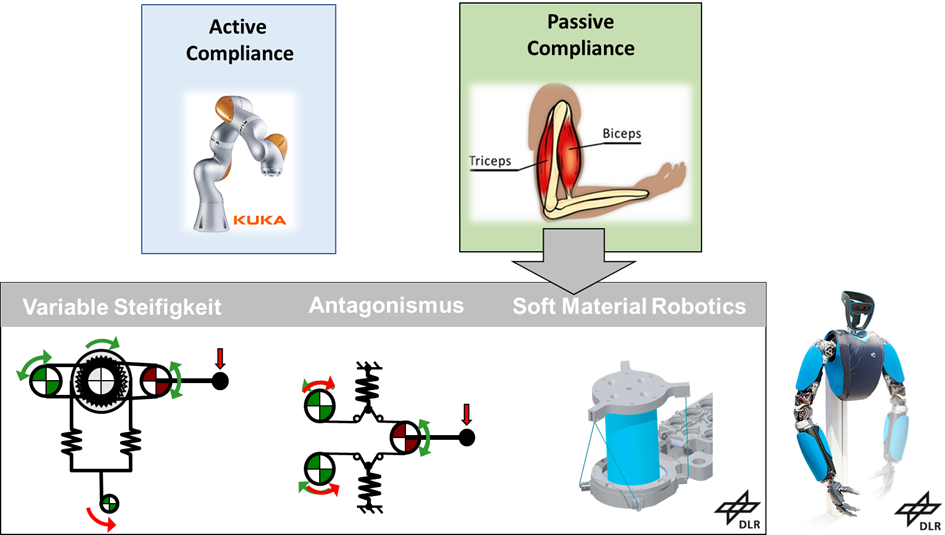
The realization of a compliant behavior via active control (i.e. impedance control) has been studied in the robotics community in much detail. For highly geared actuators, additional force sensing at the contact, or within the actuator is required to achieve high sensitivity. The application of joint torque sensors has been a major technological step in many collaborative robots. In all these cases, the bandwidth of the actuator presents a limitation of the achievable impedance behavior.
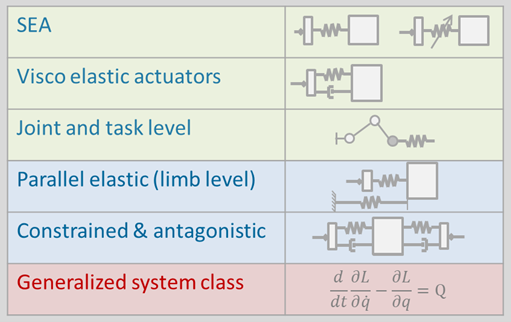
From an engineering perspective, elastic actuator concepts, such as series elastic actuators, the MACCEPA, or antagonistic actuators have been proposed in the robotics community for the following reasons:
- to achieve mechanical robustness against external shocks
- to temporary store energy for the generation of highly dynamic motions: This is particularly relevant for periodic motions (e.g. locomotion, hammering)
Moreover, also the comparison with the compliance of the muscles and tendons in the human musculoskeletal system motivates the study of elastic actuation principles in bio-inspired robot designs aiming at dynamic motion skills comparable to the human performance.
However, the compliant actuator design comes along with additional challenges for the control:
- Underactuated system dynamics
- Vibration damping
- Nonlinearity in the elastic components
- Combination of elastic actuation with multi-body dynamics
Control approaches
Our research on elastic robots covers a wide range of elastic actuator technologies, such as series elastic actuators with adjustable impedance parameters (VIA), bio-inspired antagonistic actuators, as well as robots with soft material components. We consider both model-based and data-based control approaches, in particular nonlinear passivity-based control.
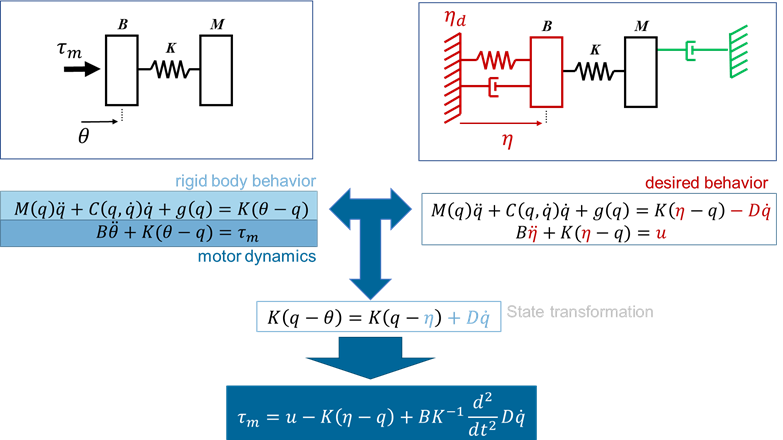
One of the important design principles is the aim to achieve smooth and precise motion control, while preserving the intrinsic elastic behavior. This lead to the ESP (“Elastic Structure Preserving”) control framework, which has been applied to the robot DAVID at the German Aerospace Center (DLR). The core idea is to reshape system dynamics from its highly oscillatory open-loop behavior into a well damped closed loop dynamics. Due to the underactuation of the system (i.e. the lack of a direct control input on the link side dynamics) this can only be achieved in terms of a virtual motor variable. The relation between the actual and virtual motor variables then gives us a state transformation from which subsequently the control action can be derived. This approach as outlined in the following image allows generalization to a large class of nonlinear elastic actuators and was verified in motion control as well as for contact tasks.
Our current research focuses on the extension towards harsh impact affected manipulation tasks, such as hammering or punching. We believe that this research will open up new applications of highly elastic robot systems in the manufacturing industry.