Locomotion and Humanoid Robotics
Biological evolution has generated amazing motion skills in humans and the animal kingdom. The question how to mimic such dynamic locomotion skills by artificial mechanisms has fascinated engineers since ancient times, as can be seen e.g. from early studies by Leonardo Da Vinci. Consequently, robotic locomotion has benefited from biomechanical studies in which appropriate template models are used for describing walking and running, e.g., by the inverted pendulum (IP) model and the spring-loaded inverted pendulum (SLIP) model, respectively. The use of humanoid robots is also often motivated by the desire to let robots act in environments tailored to humans (and the human body) such as households, warehouses, or urban environments.
A fundamental challenge of (biped) locomotion lies in the fact that the trajectory generation and the gait stabilization are tightly coupled. Instead, for a fixed-base manipulator one can make any geometrically (and statically) feasible trajectory also dynamically feasible by reducing the speed. This is certainly not true for a biped robot, which might start to fall if the stepping frequency is simply reduced.
Our research on dynamic locomotion covers the following problems
- Whole Body Control and Balancing using passivity-based control and inverse dynamics approaches
- Gait Generation and Stabilization using the Divergent Component of Motion (DCM) locomotion framework
- Reactive Walking via angular-momentum-based reactions and step adaptation
- Agile locomotion and running using bio-inspired control approaches
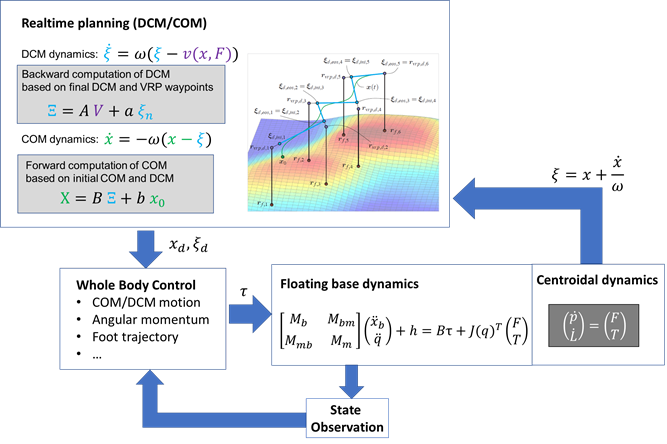
The following figure conceptually shows the main components of the DCM locomotion framework. The centroidal dynamics represents the linear and angular momentum dynamics incorporated in the complex multi-body dynamics of the humanoid. The DCM the represents a linear combination of the center-of-mass (COM) position and velocity and can be used as an intermediate state variable for the centroidal dynamics. By an appropriate reformulation of the contact force into the “virtual repellent point” (VRP), we obtain a linear dynamics, which can be utilized for highly efficient predictive motion generation at the DCM/COM level. The resulting trajectories are then realized with a whole-body controller for the complex multi-body dynamics under the effect of the different contact constraints during single and double support. In order to handle unmodelled effects, iterative learning control (not shown in the figure) can be implemented on top of this framework utilizing the quasi-periodic nature of biped locomotion.
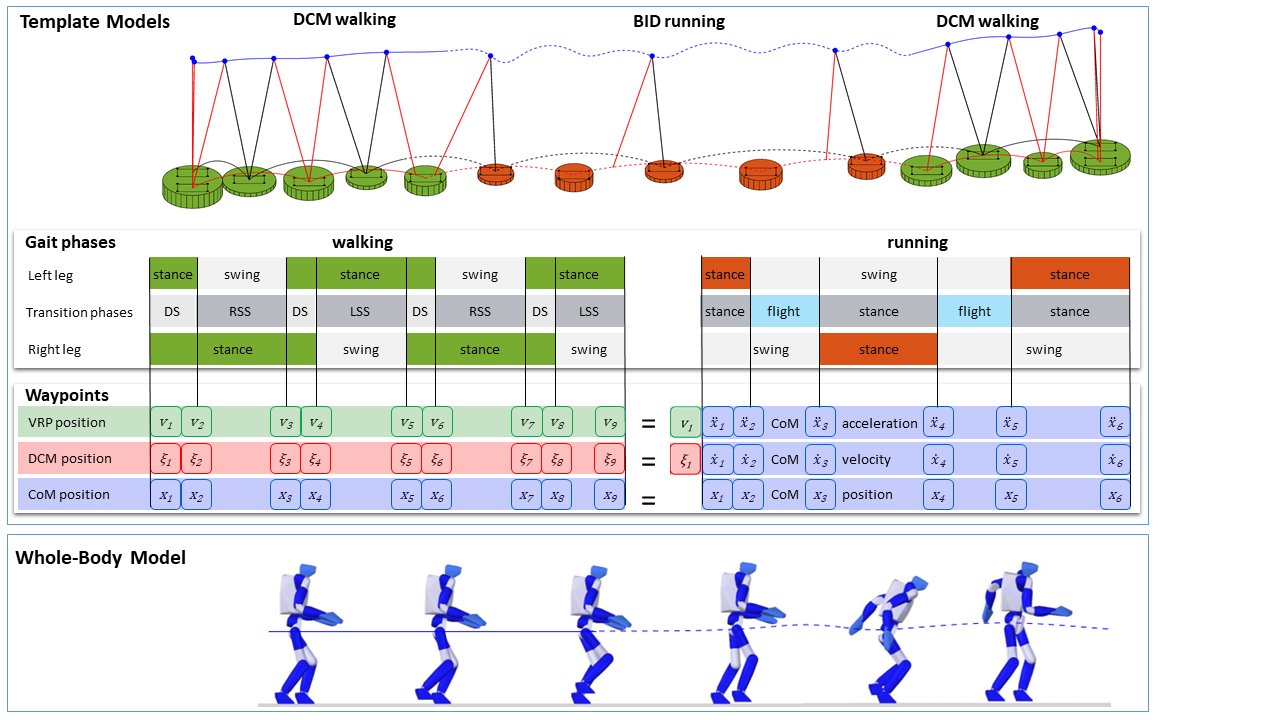
Walking on two legs offers the ability to navigate challenging and confined environments. However, this versatility comes at the cost of slower movement. Unlike most humanoid robots, humans can quickly switch from walking to running and thus significantly increasing their locomotion speed. One approach to enable humanoid running is to design a CoM trajectory that produces human-like ground reaction forces. The CoM trajectory in the running sequence is computed by solving several boundary and continuity constraints of a spline in each transition phase. Combining this bio-inspired running trajectory generation with the DCM-based walking algorithm allows us to achieve continuous gait transitions between walking and running, as illustrated in the following figure.
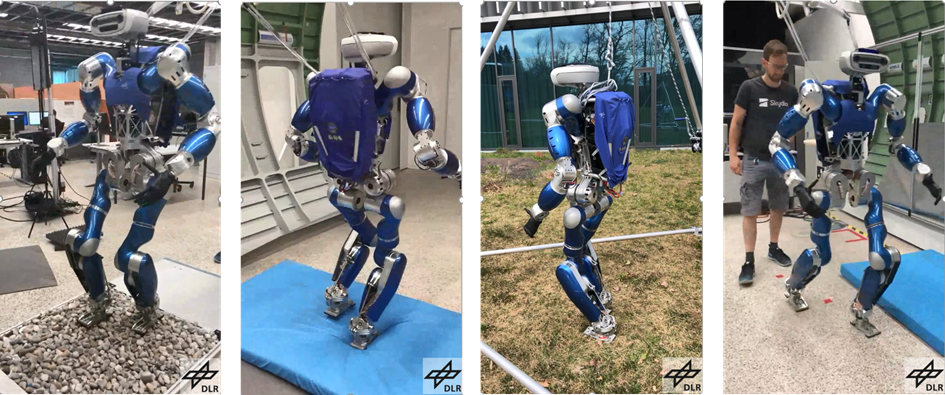
Our research activities on legged locomotion have been started and are still performed in close connection with the legged locomotion team at the Institute of Robotics and Mechatronics of the German Aerospace Center (DLR e.V.). The following figure shows e.g. the robot TORO walking on different terrain types using the DCM locomotion framework.
Our current research activities include the realization of highly dynamic locomotion (including jumping and running) with elastically actuated humanoids. This research is performed within the ERC consolidator project NatDyReL.
The following video shows a simulation of the robot Kangaroo (PAL robotics) in a dynamic hopping motion. This robot has a unique design with several parallel mechanisms, which need to be integrated in the whole-body controller. This motion was generated using a passivity-based whole-body controller and a hopping trajectory generated by a SLIP template model.