Gesamtkörperregelung
Als Gesamtkörperregelung (engl. „Whole Body Control“) bezeichnet man in der Robotik die Aufgabe, einen mobilen Manipulator mit einem Fortbewegungs- und einem Manipulationsteilsystem durch einen einheitlichen Regler zu steuern. Die Gesamtkörperregelung ist daher eng mit der gleichzeitigen Steuerung mehrerer Aufgaben verbunden, möglicherweise mit unterschiedlichen Prioritäten. Für einen humanoiden Roboter könnten das zum Beispiel die folgenden Aufgaben sein:
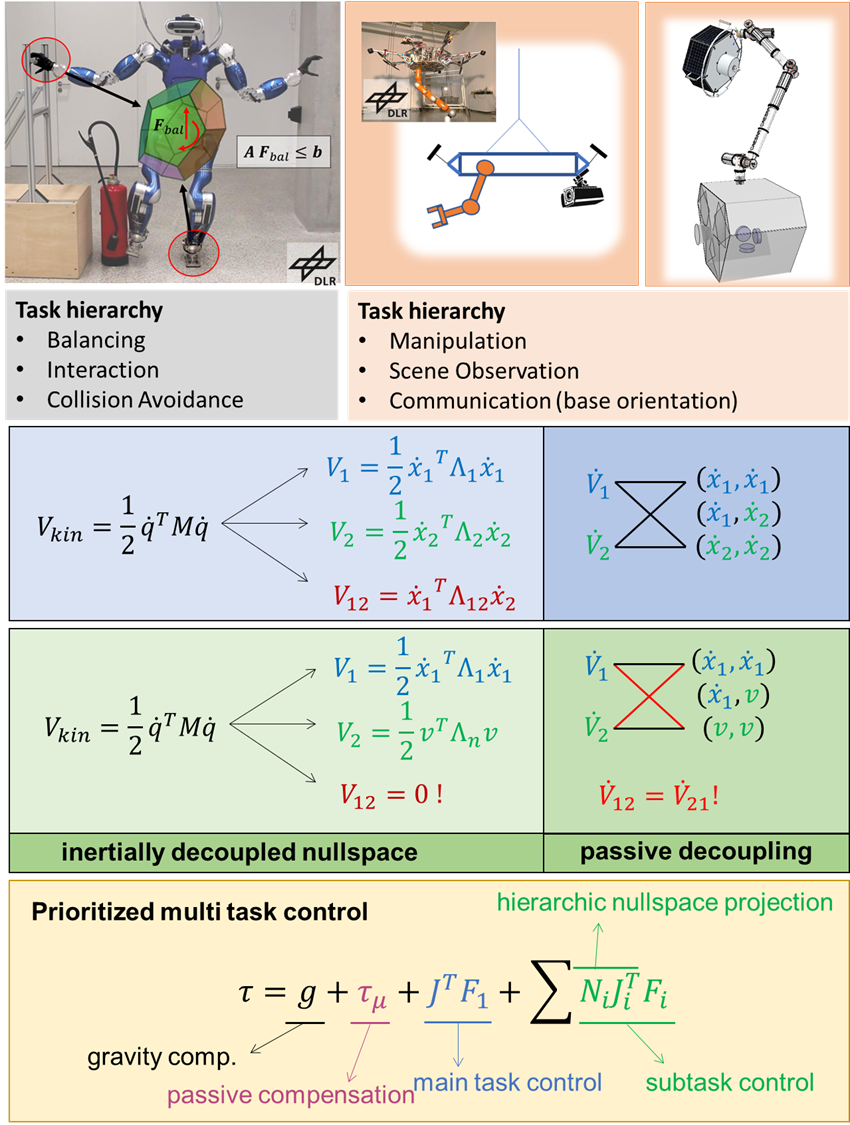
- Steuerung der Bewegung eines Endeffektors
- Physikalische Interaktion und Kraftregelung
- Kollisionsvermeidung
- Sicherheitsbezogene Aufgabenbeschreibungen
- Körperhaltung und Haltungsstabilität (z. B. eine Balancieraufgabe für einen beinbasierten Roboter).
Diese Aufgaben haben in der Regel unterschiedliche Prioritäten, was zu hierarchischen Regelungsproblemen führt. Unsere Forschung zur Gesamtkörperregelung profitiert von einer besonderen Systemdarstellung, in der die einzelnen Aufgabenkoordinaten in einer trägheitsentkoppelten Form erscheinen. Als Anwendungen betrachten wir mobile Manipulatorsysteme wie Humanoide Roboter auf Rädern und Beinen, orbitale Weltraumroboter und seilgestützte Manipulationsplattformen.
Bei orbitalen Weltraumrobotern z.B. wird besonderer Wert auf die optimale Nutzung des Antriebssystems des Basissatelliten gelegt. Um Treibstoff zu sparen, wird die Benutzung der Antriebsdüsen immer dann vermieden, wenn es möglich ist, das Regelungsziel auch nur durch den Manipulator und die bordeigenen Drallräder (falls vorhanden) zu erreichen. Darüber hinaus hat sich gezeigt, dass eine Impuls-basierte Regelungsstrategie zu effizienten Lösungen führen kann, wenn die strikten Anforderungen an die exakte Satellitenpositionierung gelockert werden.