Lokomotion und Humanoide Robotik
Die biologische Evolution hat beim Menschen und im Tierreich erstaunliche Bewegungsfähigkeiten hervorgebracht. Die Frage, wie solche dynamischen Fortbewegungsfähigkeiten durch künstliche Mechanismen nachgeahmt werden können, hat Ingenieure seit der Antike fasziniert, wie z. B. die frühen Studien von Leonardo Da Vinci zeigen. Folglich hat die robotische Fortbewegung von biomechanischen Studien profitiert, in denen geeignete Modelle zur Beschreibung des Gehens und Laufens verwendet wurden, z. B. das Inverted Pendulum (IP) Model und das Spring-Loaded Inverted Pendulum (SLIP) Model. Der Einsatz von humanoiden Robotern wird häufig auch durch den Wunsch motiviert, Roboter in Umgebungen agieren zu lassen, die auf Menschen (und den menschlichen Körper) zugeschnitten sind, wie z. B. Haushalte, Lagerhäuser oder städtische Umgebungen.
Eine grundlegende Herausforderung bei der (zweibeinigen) Fortbewegung besteht darin, dass die Generierung von Trajektorien und die Stabilisierung des Gangs eng miteinander gekoppelt sind. Bei einem Manipulator mit fester Basis kann man jede geometrisch (und statisch) machbare Trajektorie auch dynamisch machbar machen, indem man die Geschwindigkeit reduziert. Dies gilt jedoch nicht für einen zweibeinigen Roboter, der zu stürzen droht, wenn man einfach die Schrittfrequenz verringert.
Unsere Forschung im Bereich der dynamischen Fortbewegung umfasst die folgenden Probleme
- Ganzkörperregelung unter Verwendung passivitätsbasierter Regelung und Inversdynamikansätze
- Ganggenerierung und -stabilisierung unter Verwendung des DCM (Divergent Component of Motion)
- Reaktives Gehen durch Drehimpuls-basierte Reaktionen und Schrittanpassung
- Agile Fortbewegung und Laufen mittels bioinspirierter Regelungssansätze
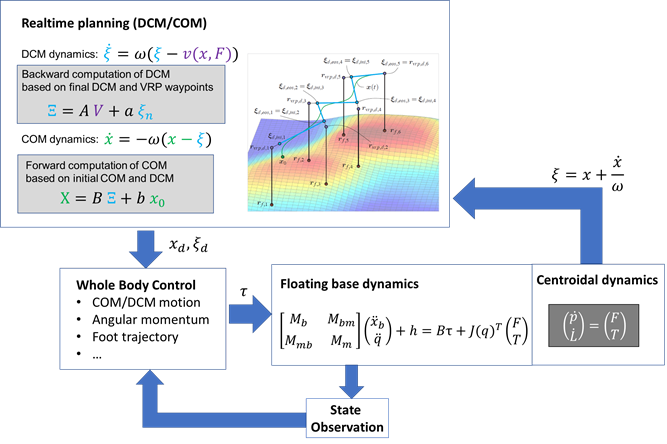
Die folgende Abbildung zeigt konzeptionell die Hauptkomponenten der DCM-basierten Bewegungsplanung. Die Schwerpunktdynamik stellt die Linear- und Drehimpulsdynamik dar, die in der komplexen Mehrkörperdynamik des Humanoiden enthalten ist. Der DCM stellt eine lineare Kombination aus der Position und der Geschwindigkeit des Massenschwerpunkts dar und kann als Zwischenzustand für die Schwerpunktdynamik verwendet werden. Durch eine geeignete Umformulierung der Kontaktkraft in den „virtuellen abstoßenden Punkt“ (VRP) erhalten wir eine lineare Dynamik, die für eine hocheffiziente prädiktive Bewegungsgenerierung auf der DCM/COM-Ebene genutzt werden kann. Die resultierenden Trajektorien werden dann mit einem Ganzkörperregler für die komplexe Mehrkörperdynamik unter der Wirkung der verschiedenen Kontaktzwänge bei Einzel- und Doppelstütze realisiert. Um mit nicht modellierten Effekten umzugehen, kann eine iterative, lernende Regelung (nicht in der Abbildung gezeigt) zusätzlich zu diesem Framework implementiert werden, die die quasi-periodische Natur der zweibeinigen Fortbewegung nutzt.
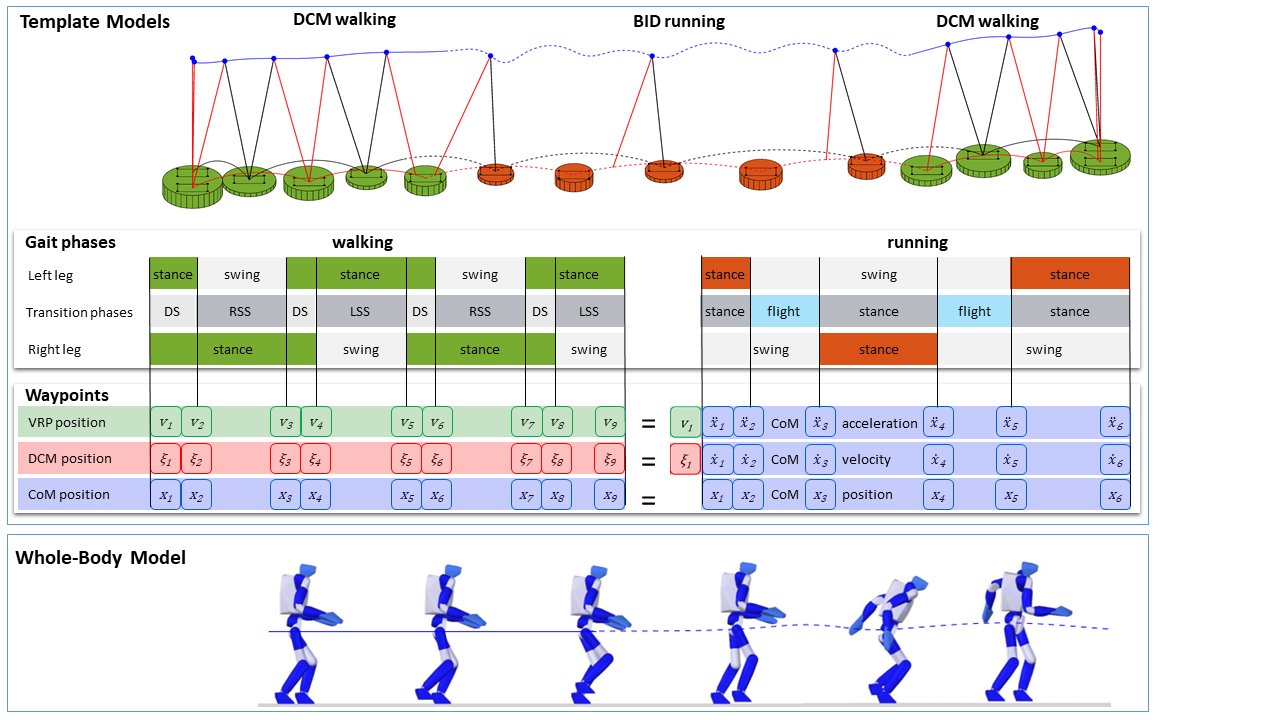
Das Gehen auf zwei Beinen bietet die Möglichkeit, sich in anspruchsvollen Umgebungen zu bewegen. Diese Vielseitigkeit hat jedoch den Nachteil, dass die Fortbewegung relativ langsam ist. Im Gegensatz zu den meisten humanoiden Robotern kann der Mensch schnell vom Gehen zum Laufen übergehen und so seine Fortbewegungsgeschwindigkeit deutlich erhöhen. Ein Ansatz, um humanoides Laufen zu ermöglichen, besteht darin, eine CoM-Trajektorie zu entwerfen, die menschenähnliche Bodenreaktionskräfte erzeugt. Die CoM-Trajektorie in der Laufsequenz wird berechnet, indem in jeder Übergangsphase mehrere Rand- und Kontinuitätsbeschränkungen eines Splines gelöst werden. Durch die Kombination dieser bioinspirierten Lauftrajektorie mit dem DCM-basierten Laufalgorithmus können wir kontinuierliche Gangübergänge zwischen Gehen und Laufen erzielen, wie in der folgenden Abbildung dargestellt.
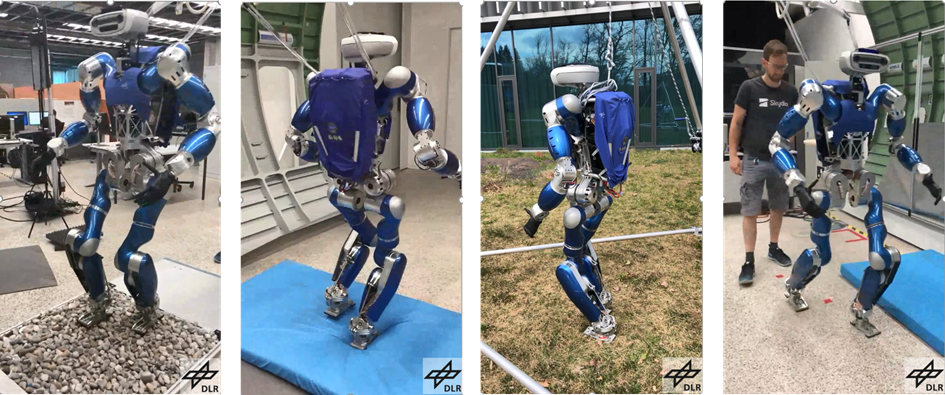
Unsere Forschungsaktivitäten auf dem Gebiet der zweibeinigen Fortbewegung wurden und werden in enger Zusammenarbeit mit dem Team für zweibeinige Fortbewegung am Institut für Robotik und Mechatronik des Deutschen Zentrums für Luft- und Raumfahrt (DLR e.V.) durchgeführt. Die folgende Abbildung zeigt z.B. den Roboter TORO, der unter Verwendung des DCM-Lokomotionsframeworks auf verschiedenen Untergründen läuft.
Unsere aktuellen Forschungsaktivitäten beinhalten die Realisierung von hochdynamischer Fortbewegung (einschließlich Springen und Laufen) mit elastisch angetriebenen Humanoiden. Diese Forschung wird im Rahmen des ERC-Konsolidierungsprojekts NatDyReL durchgeführt.
Das folgende Video zeigt eine Simulation des Roboters Kangaroo (PAL Robotics) in einer dynamischen Sprungbewegung. Dieser Roboter hat ein einzigartiges Design mit mehreren parallelen Mechanismen, die in die Ganzkörperregelung integriert werden müssen. Diese Sprungbewegung wurde mit einer passivitätsbasierten Ganzkörperregelung und einer durch ein SLIP-Template-Modell erzeugten Trajektorie erzeugt.