Physikalische Interaktion und Teleoperation
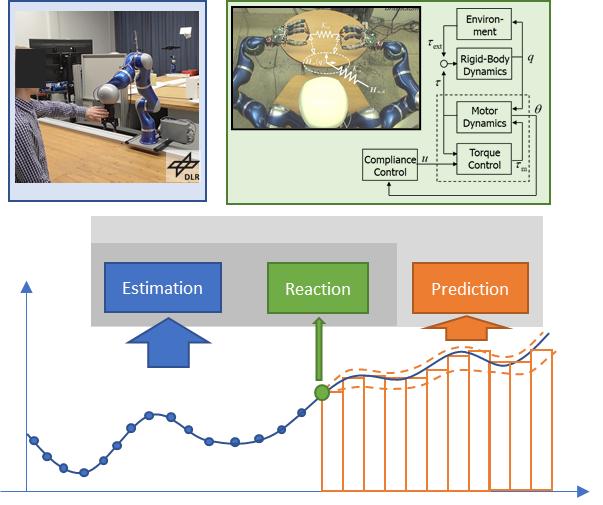
Die physische Interaktion eines Roboters, z.B. mit seiner Umgebung oder Mensch-Interaktionen, ist heute ein besonders relevanter Teil seines Aufgabenspektrums. Um diese Thematik weiter voranzutreiben, gehört zu unseren Forschungsaktivitäten die Entwicklung von Impedanz- und Nachgiebigkeitsregelungen für drehmomentgeregelte Roboter, die auf einem elastischen Robotermodell basieren. Diese Regelungsalgorithmen sind heute in mehreren kommerziellen kollaborativen Manipulatoren wie dem iiwa von KUKA oder dem Panda-Roboter der Firma Franka Emika standardmäßig verfügbar.
Spezielle Anwendung bringen zusätzliche und interessante Herausforderungen mit sich. So erfordern beispielsweise ein Manipulator auf einer bewegten Basis oder Robotersysteme mit äußerst komplexen Teilsystem neue und innovative Ansätze. Aus diesem Grund befassen wir uns im Bereich der Interaktionsregelung nicht nur mit Ansätzen aus dem Gebiet der „compliant motion control“ sondern forschen auch an der Kombination mit externer Sensorik. Mit Blick auf die Zukunft sind wir der Überzeugung, dass die Kombination aus klassischer Regelung mit datenbasierten Algorithmen noch nie dagewesene Möglichkeiten und Chancen bietet. Unter anderem ist eine solche Anwendung sinnvoll, wenn die Aufgabe schwer zu modellieren ist oder wenn die Manipulatordynamik selbst große Unsicherheiten aufweist.
Die aktuellen Bewegungsplanungsalgorithmen nutzen die Möglichkeiten der nachgiebigen Steuerung noch nicht vollständig aus. Wir glauben, dass die Integration von modellbasierten Vorhersagen (englisch: MPC) dazu beitragen wird, die verbleibende Lücke zwischen leistungsfähiger Bewegungsplanung und den bestehenden reaktiven Regelungskonzepten zu schließen. Immer mit dem Ziel vor Augen eine sichere und zuverlässige Interaktion des Roboters mit seiner Umwelt und dem Menschen zu gewährleisten.
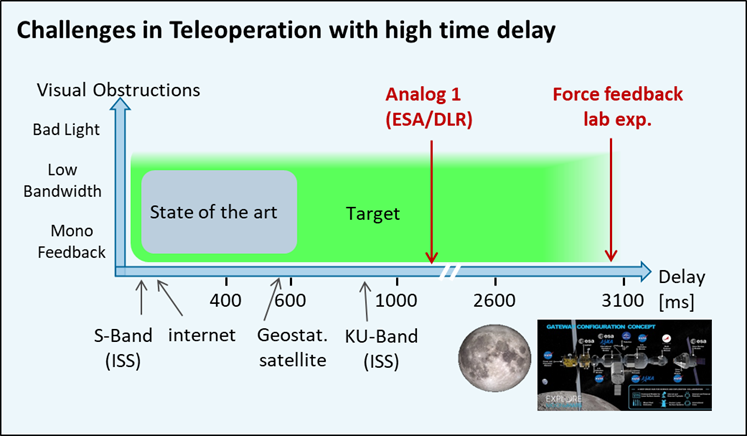
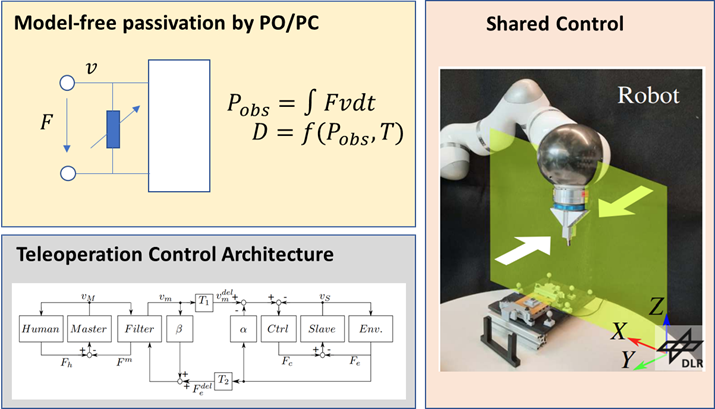
Bei der Teleoperation mit Kraftrückkopplung kommt es zu einer einzigartigen Interaktion zwischen dem menschlichen Benutzer und dem Roboter. Jede Zeitverzögerung in der Kommunikation hat einen erheblichen Einfluss auf die Stabilität und die Leistung eines Teleoperationssystems. In unserer bisherigen Forschung haben wir das PO/PC-Kontrollsystem für die Passivierung von Teleoperationssystemen eingesetzt. PO/PC implementiert im Wesentlichen einen variablen Dämpfer, der immer dann aktiviert wird, wenn ein nicht passives Verhalten des Systems beobachtet wird. Die ursprüngliche PO/PC-Formulierung verwendete die befohlene Kraftrückführung und erforderte eine zusätzliche Driftkompensation aufgrund der Übertragung (und lokalen Integration) von Geschwindigkeitssignalen. Jüngste Ergebnisse haben gezeigt, dass die Verwendung der gemessenen Kraftrückführung zusätzliche Möglichkeiten zur Stabilisierung von Teleoperationssystemen mit großen Zeitverzögerungen bietet, wie sie z. B. in der Weltraumrobotik bei der Teleoperation von Planetenrobotern von einem Orbiter aus (~1 s Verzögerung) oder sogar in extremen Fällen bei der Teleoperation eines Mondroboters von der Erde aus (~3 s Verzögerung) auftreten [*].
Die Kombination von Teleoperation und autonomem Verhalten in einer gemeinsamen Regelungsarchitektur ermöglicht es, die mentale Arbeitsbelastung des menschlichen Benutzers zu verringern. Darüber hinaus ist sie von großer Bedeutung in Teleoperationsszenarien mit großen Verzögerungen oder wenn der Benutzer nur eine begrenzte Anzahl von Freiheitsgraden steuern kann.
Referenzen
[*] Michael Panzirsch, Aaron Pereira, Harsimran Singh, Bernhard Weber, Edmundo Ferreira, Andrei Gherghescu, Lukas Hann, Emiel den Exter, Frank van der Hulst, Levin Gerdes, Leonardo Cencetti, Kjetil Wormnes, Jessica Grenouilleau, William Carey, Ribin Balachandran, Thomas Hulin, Christian Ott, Daniel Leidner, Alin Albu-Schaeffer, Neal Y. Lii, Thomas Krueger, Exploring Planet Geology through Force-Feedback Tele-Manipulation from Orbit, Science Robotics, 2022, DOI: 10.1126/scirobotics.abl6307.