Regelung elastischer Roboter (Soft Robotics)
Wie nachgiebiges Verhalten aktiv durch die Regelung (d.h. Impedanzregelung) umgesetzt werden kann, wurde in der Robotikgemeinschaft eingehend untersucht. Für Aktoren mit großen Übersetzungen ist eine zusätzliche Kraftsensorik am Kontakt oder innerhalb des Aktors erforderlich, um eine hohe Empfindlichkeit zu erreichen. Der Einsatz von Gelenkdrehmomentsensoren war ein wichtiger technologischer Schritt für viele kooperative Roboter. Das erreichbare Impedanzverhalten wird in all diesen Fällen jedoch durch die Bandbreite des Aktuators begrenzt.
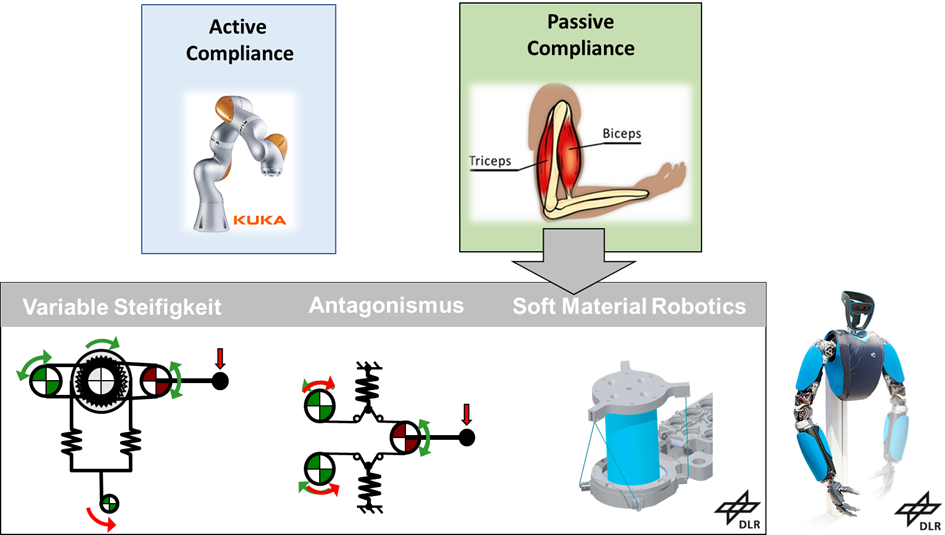
Aus technischer Sicht sind elastische Antriebe, wie seriell elastische Aktuatoren, MACCEPA oder antagonistische Aktuatoren in der Robotikgemeinschaft aus den folgenden Gründen konzipiert worden:
- um mechanische Robustheit gegen Stöße zu erreichen.
- zur vorübergehenden Speicherung von Energie für die Erzeugung hochdynamischer Bewegungen. Dies ist insbesondere für periodische Bewegungen (z. B. Fortbewegung, Hämmern) von Bedeutung.
Auch der Vergleich mit der Nachgiebigkeit der Muskeln und Sehnen im menschlichen Bewegungsapparat motiviert die Untersuchung elastischer Antriebsprinzipien. Bioinspirierte Roboterdesigns zielen auf dynamische Bewegungsfähigkeiten ab, die mit der menschlichen Leistung vergleichbar sind.
Das Design nachgiebiger Aktoren geht jedoch mit zusätzlichen Herausforderungen für die Regelung einher:
- unteraktuierte Systemdynamik
- Schwingungsdämpfung
- Nichtlinearität der elastischen Komponenten
- Kombination der elastischen Aktuierung mit der Mehrkörperdynamik
Regelungsmethoden
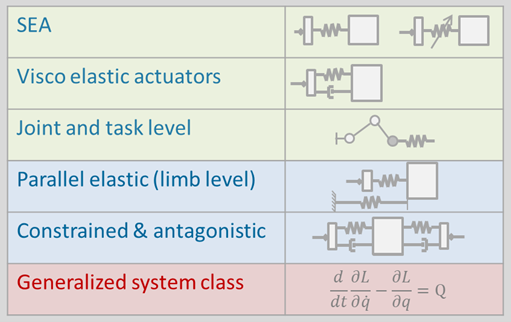
Unsere Forschung zu elastischen Robotern umfasst ein breites Spektrum an elastischen Aktuatortechnologien, wie z.B. seriell elastische Aktuatoren mit einstellbaren Impedanzparametern (VIA), bioinspirierte antagonistische Aktuatoren sowie Roboter mit flexiblen Materialkomponenten. Wir befassen uns sowohl mit modellbasierten als auch datenbasierten Regelungsmethoden, wobei ein Schwerpunkt auf der nichtlinearen passivitätsbasierten Regelung liegt.
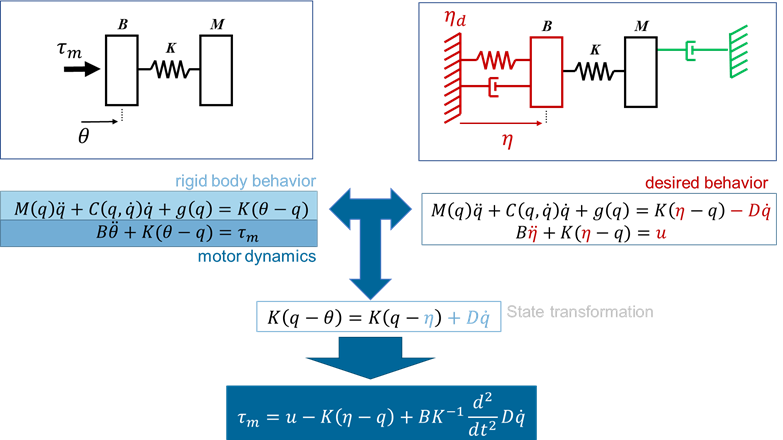
Ein wichtiges Designziel ist es, die Bewegung präzise zu regeln und dabei das intrinsische elastische Verhalten zu erhalten. Dies führte zu dem ESP („Elastic Structure Preserving“) Regelungskonzept, das auf den Roboter DAVID des Deutschen Zentrums für Luft- und Raumfahrt (DLR) angewendet wurde. Die Kernidee besteht darin, die stark oszillierende Systemdynamik im offenen Regelkreis in eine gut gedämpfte Dynamik im geschlossenen Regelkreis umzuformen. Aufgrund der Unteraktuierung des Systems (d.h. des Fehlens eines direkten Steuereingangs auf die gelenkseitige Dynamik) kann dies nur in Form einer virtuellen Motorvariablen erreicht werden. Die Beziehung zwischen den tatsächlichen und den virtuellen Motorvariablen ergibt dann eine Zustandstransformation, aus der anschließend der Stelleingang abgeleitet werden kann. Dieser Ansatz, wie er in der folgenden Abbildung skizziert ist, lässt sich auf eine große Klasse nichtlinearer elastischer Aktoren verallgemeinern und wurde sowohl für die Bewegungsregelung als auch für Kontaktaufgaben verifiziert.
Unsere derzeitige Forschung konzentriert sich auf die Ausweitung in Richtung harter, stoßbeeinflusster Manipulationsaufgaben, wie Hämmern oder Stanzen. Wir glauben, dass diese Forschung neue Anwendungen für hochelastische Robotersysteme in der Fertigungsindustrie eröffnen wird.