Aktive Kamerastabilisierungsplattform
Projektschwerpunkte
- Optimierung des Aufbaus (Aktoren, Sensoren) der Kamerastabilisierungsplattform
- Schätzung der Kameraorientierung mittels redundanter Inertialsensorik
- Entwurf einer nichtlinearen Regelungsstrategie für die Kameraorientierung
- Prototypische Implementierung und Test
Beschreibung
In vielen Filmszenen oder Video-Clips wird die Kamera dynamisch bewegt um die Perspektive zu wechseln oder um spannendere Filme zu erzeugen. Typischerweise kommen Kamerakräne, Steady-Cam Systeme, Kabelkameras oder Helikopterkameras zum Einsatz wenn solche Szenen produziert werden. Um unerwünschte Änderungen der Ausrichtung der Kamera zufolge der Bewegung des beweglichen Benutzers zu unterdrücken muss die Kamera stabilisiert werden. Dazu werden meist inertial stabilisierte Plattformen (ISP) mit kardanischer Aufhängung verwendet.
In diesem Projekt wurde eine neuartige aktive Kamerastabilisierungsplattform betrachtet, die vom Projektpartner qinematiq entwickelt wurde. Sie besitzt eine kardanische Aufhängung mit drei Freiheitsgraden, welche über in den Gelenken eingebaute Motoren aktuiert werden. Zur Messung der Orientierung der Kamera bzw. des Handgriffes der Plattform werden Inertialsensoren (IMUs) verwendet, siehe Abb. 1.
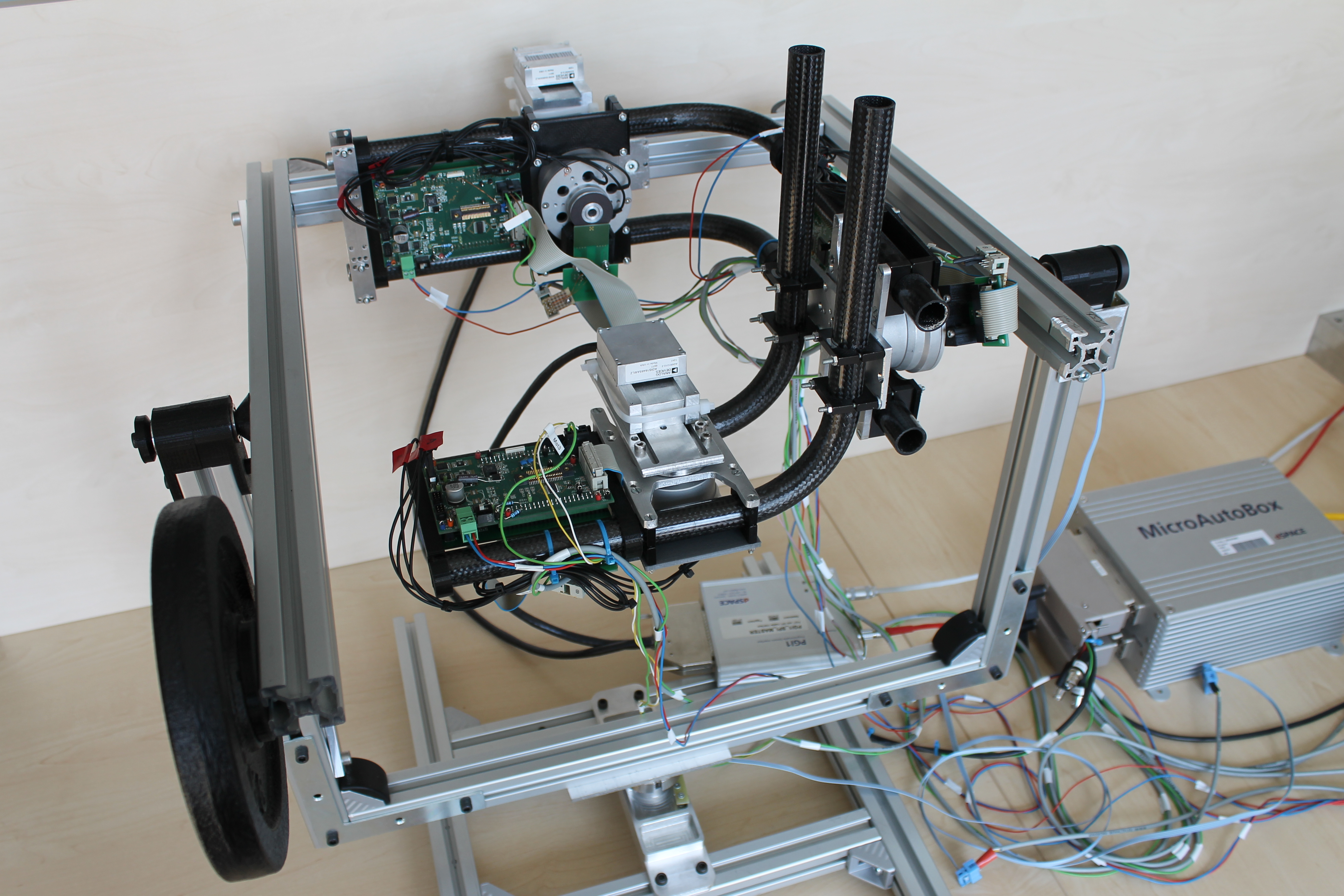
Experimenteller Aufbau der Kamerastabilisierungsplattform
Die wesentliche Regelungsaufgabe besteht in der Regelung der Orientierung der Kamera entsprechend dem Wunsch des Kameramanns. Für diese Aufgabe wurde eine flachheitsbasierte Regelungsstrategie entwickelt, welche auf Schätzung der Orientierung der Kamera und des Handgriffes der Plattform beruht. Diese Schätzwerte wurden mit Hilfe eines multiplikativen Extended Kalmanfilters ermittelt, welches die Messwerte aller Sensoren der Plattform fusioniert. Ein wesentlicher Schritt zum Erreichen der gewünschten Genauigkeit der Plattform war der Entwurf bzw. die Auswahl und Platzierung der Aktoren und Sensoren. Die praktische Verwendbarkeit der gesamten Regelungs- und Schätzstrategie wurde anhand von Experimenten an einem Prototypen der Plattform nachgewiesen.
Ausgewählte Publikationen
- F. Königseder, W. Kemmetmüller, and A. Kugi, Attitude Estimation Using Redundant Inertial Measurement Units for the Control of a Camera Stabilization Platform, IEEE Transactions on Control Systems Technology, vol. 24, iss. 5, p. 1837–1844, 2016.
[BibTex] [Download]@Article{Koenigseder16, Title = {Attitude Estimation Using Redundant Inertial Measurement Units for the Control of a Camera Stabilization Platform}, Author = {K{\"o}nigseder, F. and Kemmetm{\"u}ller, W. and Kugi, A.}, Journal = {IEEE Transactions on Control Systems Technology}, Pages = {1837--1844}, Volume = {24}, Year = {2016}, Number = {5}, Doi = {10.1109/TCST.2015.2510324}, ISSN = {1063-6536}, } - F. Königseder, W. Kemmetmüller, and A. Kugi, Modellierung und Regelung einer tragbaren Kamerastabilisierungsplattform, in Tagungsband Mechatronik 2013, Aachen, Germany, 2013, p. 99–104.
[BibTex]@InProceedings{Konigseder13, author = {F. K{\"o}nigseder and W. Kemmetm{\"u}ller and A. Kugi}, title = {{{M}odellierung und {R}egelung einer tragbaren {K}amerastabilisierungsplattform}}, booktitle = {Tagungsband Mechatronik 2013}, year = {2013}, month = {3}, pages = {99--104}, address = {Aachen, Germany}, }
Projektpartner und Förderung
Ansprechpartner
Univ.Prof. Dr.-Ing. Wolfgang KemmetmüllerUniv.-Prof. Dr.techn. Andreas Kugi