
Fundamentals of opto-mechatronic systems (OMC)
Project focus
- Mechatronic system design for maximum performance
- Mechatronic design of tip-tilt scanning mirror units for sensor applications
- Methods for enabling hybrid reluctance actuation based scanning systems
- Control methods for opto-mechatronic components in sensor systems
- Design and control of active platforms for robot-based inline measurement systems
Description
Currently innovation is taking place at the border of disciplines rather than in one individual field of engineering. This particularly holds for application domains that span more than one field of engineering, since a high level of system integration from different disciplines provides solutions that a single domain alone cannot provide. As an example, the combination of optics and mechatronics form the interdisciplinary field of opto-mechatronics. In this respect, the fusion of precision engineering, mechatronic systems and optical components carries a great potential for increasing precision, speed and versatility of 3D optical measurement systems.
The combination of e.g. an off the shelf dimensional sensor and a linear positioning axis is always limited by the performance of the standard automation components. For example the intrinsic mechanical mode shapes of the actuator, the sensor components and their mountings, may limit the speed and precision of motion during scanning, and thereby the reliability of the measurement data. To overcome the limitations arising from component-based designs, an integrated mechatronic design approach is needed that considers all system components as well as the targeted application from the very begin of the system development.
The main goal of this systematic integration of mechanical, optical, electrical components as well as control systems into one opto-mechatronic system is to boost the system performance in terms of speed and precision. This holistic system view shall enable a resulting system performance as close as possible to the Pareto optimum for the respectively applied technology. Best practice examples of highly integrated systems are state of the art optical lithography systems for the semiconductor industry, telescopes, optical free-space communication, laser scanning microscopy and atomic force microscopes.
The extension of dimensional optical sensors towards 3D measurement capabilities with high precision and high speed will enable the development of technologies for integrated inspection systems of future production lines, able to perform versatile measurements on various free-formed surfaces. They will particularly be suited for high precision applications and measurements in flexible production environments, where sizes and relevant features may vary significantly.
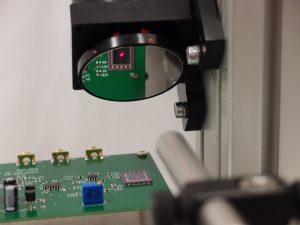
Tip-Tilt-mirror system scanning a laser beam over a surface for 3D-inspection
Mechatronic Design and Integration for Maximum Performance
A systematic mechatronic design approach that considers the holistic system view is developed and researched along the design of fast scanning mirror solutions, where both, generic approaches for general purposes and highly customized approaches for dedicated applications, are considered. Structural design and analysis, actuator and sensor principles and methods, actuator and sensor placement and integration, modes of operation as well as mechatronic design methods are considered in this course to deal with design trade-offs and to ensure optimal system performance.
Pareto Front Estimation for Actuation Technologies
In the course of designing high performance mechatronic scanning systems, several contradicting requirements, such as speed and range, must be met at the same time. Actuators are a key component in this relation, as depending on the system specifications, different actuation technologies may prove advantageous. To provide a design tool for systematically tackling this challenge in the design phase a method for estimating the limitations of various actuation technologies has been developed. The key idea is to estimate the tradeoff limit curve, i.e. the Pareto front, for each actuation technology in the 2-dimensional range-speed performance space to identify the actuation principle enabling the highest performance for a desired set of range and bandwidth requirements. The results in Fig.2 illustrate the advantages and limitations of the three established actuation principles and reveal regions in which a particular actuation principle outperforms the other ones.
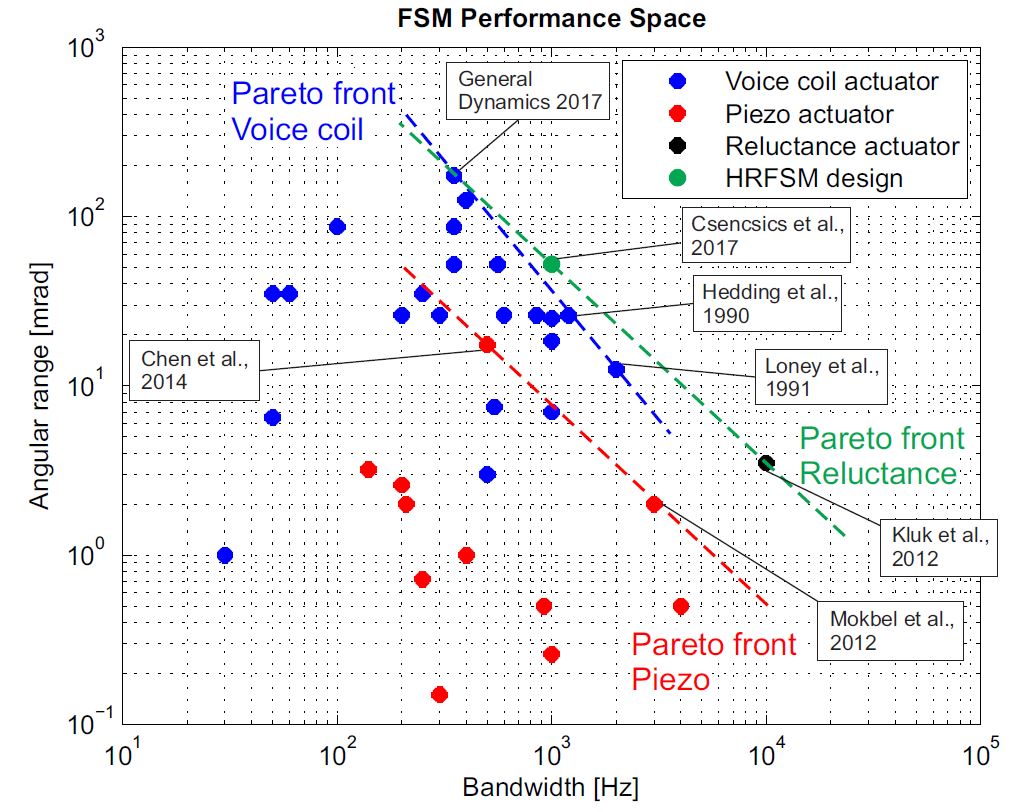
Estimated Pareto fronts for voice coil, piezo and hybrid reluctance actuated FSM systems.
Dynamic Performance Estimation
A reliable estimation of the resulting performance of several performance outputs, such as energy consumption, tracking error or resolution, of the feedback and/or feedforward controlled system is a valuable tool in mechatronic system design. A reliable virtual prototyping framework would enable (i) the cutting of costs, by identifying most important components, (ii) a speed-up of the design process, and (iii) enhanced insights into the design and the interrelations between components. For this purpose an integrated framework for the dynamic performance estimation (DPE) of mechatronic scanners in the design phase, which is based on frequency domain models of system components and signals in the system. Fig.3 shows a comparison of estimated and measured rms values for current consumption and tracking error of a commercial fast steering mirror tracking desired scan trajectories.
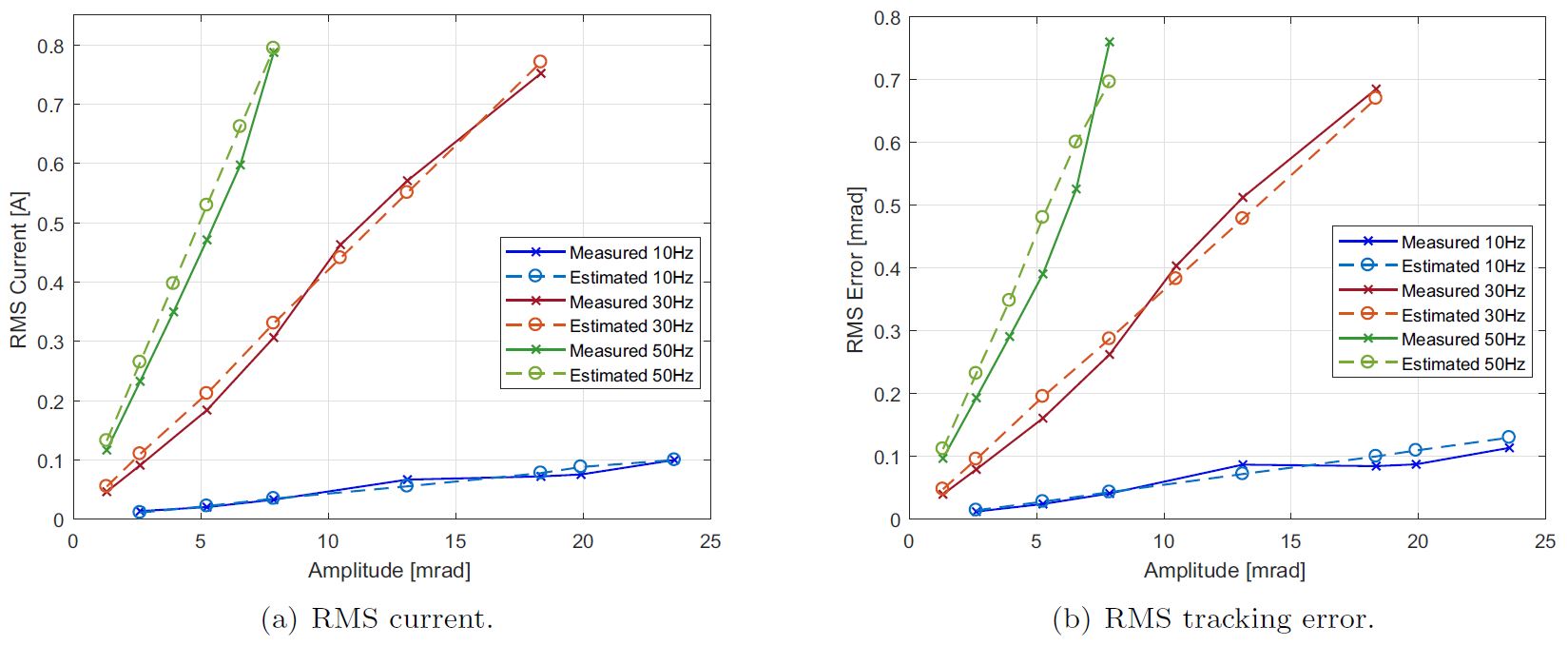
Comparison of estimated and measured rms values for the performance outputs coil current and tracking error for a FSM tracking 10 Hz, 30 Hz and 50 Hz raster trajectories of arbitrary amplitude.
Integration of System, Control and Trajectory Design
Tuning the performance of a mechatronic system to approach the Pareto front in the performance space is clearly linked to the extent a system can be tailored to a specific task. For scanning systems, the first step in a systematic design approach is the identification of the targeted mode of operation and the applied reference trajectories, in order to enable a tailored process and controller design.
Scan-based optical metrology systems in industry need to be exceptionally fast to enable the required throughput, such that Lissajous-based scan trajectories are identified as most suitable for this purpose. The trajectory builds up gradually (multi-resolution), providing an overview of the entire scan area after a fraction of the frame time, which is a valuable property. For tracking the sinusoidal reference signals of each axis tailored dual-tone (DT) are developed (see Fig. 4(a)) , which show localized high control efforts and good tracking only at the two drive frequencies of the Lissajous trajectory and reduce the tracking error by one order of magnitude compare to the state of the art. Extending the integration to the system design by tuning the resonance frequency of each axis to the desired sinusoidal reference (see Fig. 4(b)) additionally enables a reduction of power consumption by two orders of magnitude and an extension of the scan range by a factor of 60 (see Fig. 4(c)).
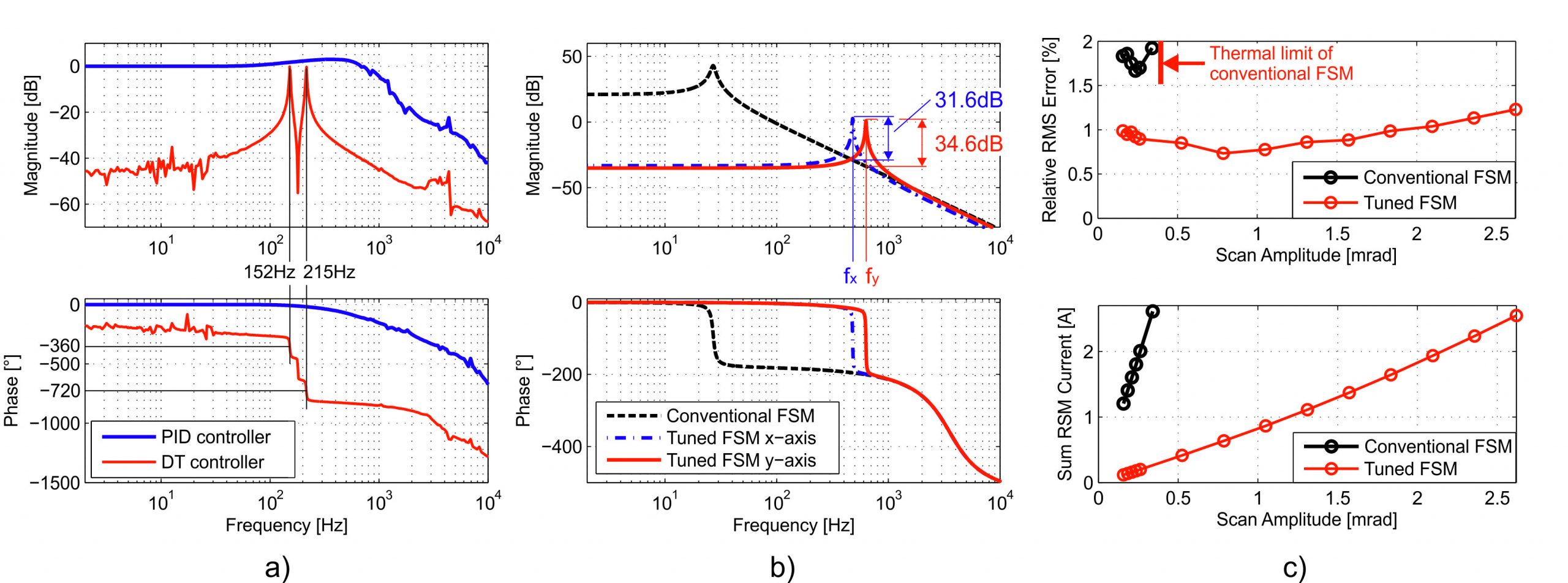
Integration of FSM system, control and trajectory design. (a) shows the closed-loop TF of the FSM with PID and DT controller, (b) depicts the tailored mechanical design and (c) shows the improved tracking error and scan range.
Integrated High Performance Tip/Tilt Scanning Mirrors
Due to a higher force density as compared to voice coil actuators and larger working ranges as compared to piezos, hybrid reluctance (HR) actuators have been identified as attractive alternative for tip/tilt actuators. A common disadvantage of HR actuated systems reported so far is their large size, which is either caused by the size and number of actuators or the low level of system integration. The system dimensions are, however, a key property when it comes to the integration of FSMs into compact optical systems, such as in scanning laser metrology, projection systems or optical inter-satellite communication.
In order to enable the integration with optical sensor heads a highly integrated FSM system was designed based on a previously developed HR tip/tilt actuator. The compact FSM, depicted in Fig. 5, has a diameter of only 32 mm (about the diameter of a 2 Euro coin), a height of 30 mm and carries a 20 mm mirror. It provides a mechanical angular range of ±3° (±52.4 mrad) and a small signal closed-loop bandwidth of 1.5 kHz in both axes. Compared to a state-of-the-art hybrid reluctance actuated FSM systems the volume of the system is reduced by one order of magnitude, while the product of range times bandwidth, representing a measure for the system performance, is concurrently improved by 50%.
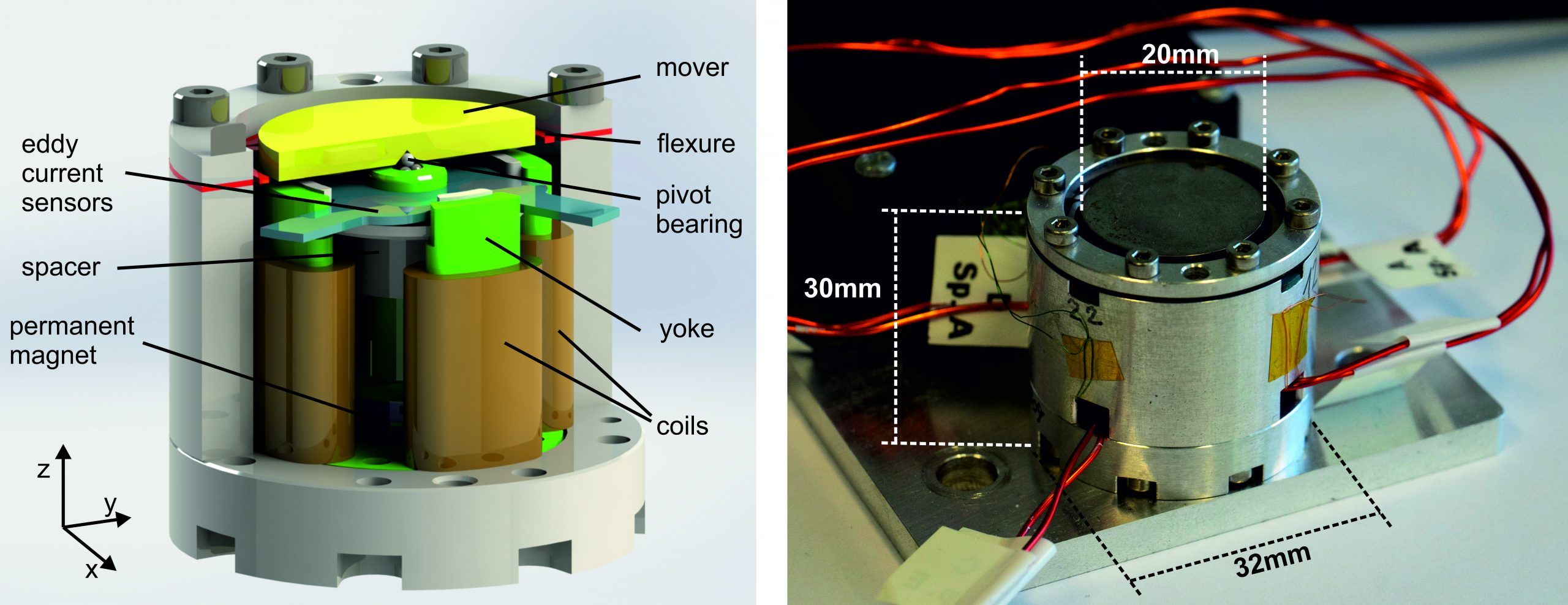
CAD rendering and protoype of compact HR actuated FSM system.
Hybrid Reluctance Actuation for Next Generation Scanning and Positioning Systems
Next-generation high-quality motion systems require high-precision actuators with higher energy efficiency and larger force to improve the system throughput. Particularly, actuators with a motor constant higher than comparable voice coil actuators are highly desired. This project investigates hybrid reluctance actuators (HRAs) with guiding flexures as a promising candidate of next-generation systems.
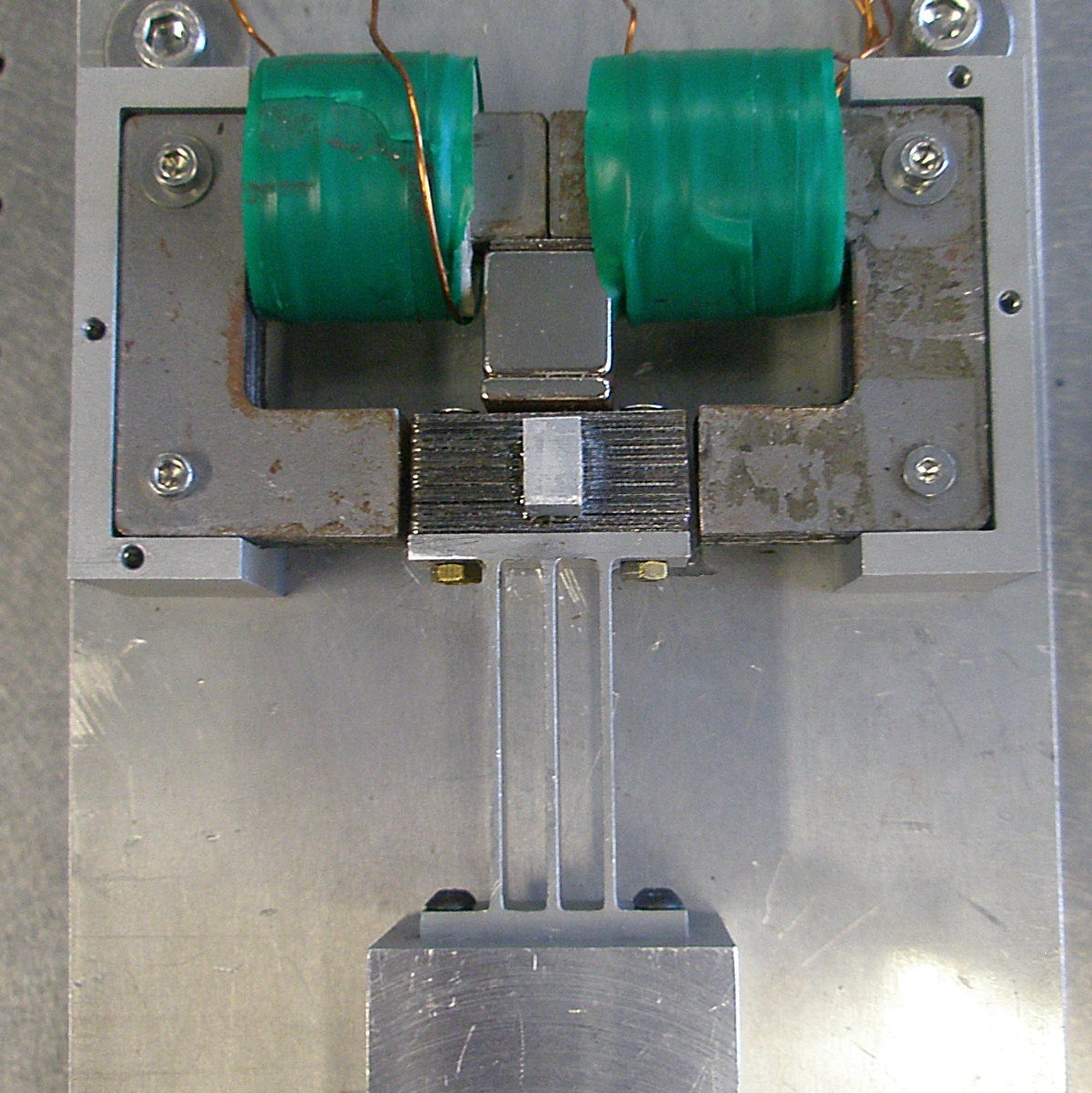
Experimental linear 1DoF hybrid reluctance actuator.
See sub-project for further information: Hybrid reluctance actuators for high precision motion
Precision Motion Control
Control methods for optimal control and operation of opto-mechatronic systems are developed based on dynamic models of the opto-mechatronic systems, which are derived by system identification methods and physics based modeling. Targeted control approaches for systems requiring arbitrary scan motion include model based control as well as two degrees of freedom (2DOF) control. Repetitive control and iterative learning control approaches are investigated for repetitive motion patterns and noise resilient controllers are developed and tested for narrow band motion control, such as in resonant scanning mode. Real-time and DAQ systems that comprise field programmable gate arrays (FPGA), digital signal processors (DSP), and System-on-Chip (SoC) architectures are evaluated for the implementation of algorithms such as the real-time control system for operation, data-acquisition, signal processing and combination of sensor signals.
Active Platforms for Robotic Inline Measurement Systems
High precision in-line measurements on free form surfaces are considered a key factor for the industrial production of the future. Robot-based measurement systems provide the required flexibility but are typically lacking the required precision. The scope of this project is the development of a measurement platform designed as end effector for industrial robots, which carries a measurement or inspection tool and compensates for environmental disturbances, enabling precision inline measurements on arbitrarily oriented surfaces.
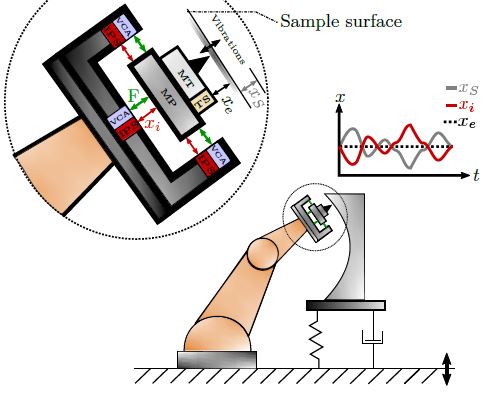
Measurement platform for robot-based high precision in-line measurements on free form surfaces.
See sub-project for further information: Robotic inline metrology for freeform surfaces
Applications
- In-line metrology
- Precision motion systems
Related publications
Journal articles
- S. Ito, F. Cigarini, and G. Schitter, Flux-controlled Hybrid Reluctance Actuator for High-precision Scanning Motion, IEEE Transactions on Industrial Electronics, vol. 67, iss. 11, pp. 9593-9600, 2020.
[BibTex] [Download]@Article{TUW-282490, author = {Ito, Shingo and Cigarini, Francesco and Schitter, Georg}, title = {Flux-controlled Hybrid Reluctance Actuator for High-precision Scanning Motion}, journal = {IEEE Transactions on Industrial Electronics}, year={2020}, volume={67}, number={11}, pages={9593-9600}, doi = {10.1109/TIE.2019.2952829}, keywords = {Actuators, Nanopositioning, Magnetic variables control, Motion control}, }
- F. Cigarini, S. Ito, S. Troppmair, and G. Schitter, Comparative Finite Element Analysis of a Voice Coil Actuator and a Hybrid Reluctance Actuator, IEEJ Journal of Industry Applications, vol. 8, iss. 2, 2019.
[BibTex]@Article{TUW-276121, author = {Cigarini, Francesco and Ito, Shingo and Troppmair, Stefan and Schitter, Georg}, title = {Comparative Finite Element Analysis of a Voice Coil Actuator and a Hybrid Reluctance Actuator}, journal = {IEEJ Journal of Industry Applications}, year = {2019}, volume = {8}, number = {2}, doi = {10.1541/ieejjia.8.192}, keywords = {Electromagnetic actuators, high-precision motion, finite element analysis}, numpages = {8} }
- E. Csencsics, S. Ito, J. Schlarp, and G. Schitter, System Integration and Control for 3D Scanning Laser Metrology, IEEJ Journal of Industry Applications, vol. 8, iss. 2, 2019.
[BibTex] [Download]@Article{TUW-272918, author = {Csencsics, Ernst and Ito, Shingo and Schlarp, Johannes and Schitter, Georg}, title = {System Integration and Control for 3D Scanning Laser Metrology}, journal = {IEEJ Journal of Industry Applications}, year = {2019}, volume = {8}, number = {2}, note = {eingeladen}, doi = {10.1541/ieejjia.8.207}, keywords = {Mechatronic imaging systems, system integration, scanning laser metrology, model based control, iterative learning control}, numpages = {11} }
- S. Ito, S. Troppmair, F. Cigarini, and G. Schitter, High-speed Scanner with Nanometer Resolution Using a Hybrid Reluctance Force Actuator, IEEJ Journal of Industry Applications, vol. 8, iss. 2, 2019.
[BibTex]@Article{TUW-272944, author = {Ito, Shingo and Troppmair, Stefan and Cigarini, Francesco and Schitter, Georg}, title = {High-speed Scanner with Nanometer Resolution Using a Hybrid Reluctance Force Actuator}, journal = {IEEJ Journal of Industry Applications}, year = {2019}, volume = {8}, number = {2}, doi = {10.1541/ieejjia.8.170}, keywords = {High-precision actuators, hybrid reluctance actuator, nanopositioning, motion control.}, numpages = {7} }
- S. Ito, S. Troppmair, B. Lindner, F. Cigarini, and G. Schitter, Long-range Fast Nanopositioner Using Nonlinearities of Hybrid Reluctance Actuator for Energy Efficiency, IEEE Transactions on Industrial Electronics, vol. 66, iss. 4, 2019.
[BibTex] [Download]@Article{TUW-271193, author = {Ito, Shingo and Troppmair, Stefan and Lindner, Bernhard and Cigarini, Francesco and Schitter, Georg}, title = {Long-range Fast Nanopositioner Using Nonlinearities of Hybrid Reluctance Actuator for Energy Efficiency}, journal = {IEEE Transactions on Industrial Electronics}, year = {2019}, volume = {66}, number = {4}, doi = {10.1109/TIE.2018.2842735}, keywords = {Actuators, motion control, nanoposition- ing, magnetic circuits}, numpages = {9}, }
- E. Csencsics, J. Schlarp, T. Schopf, and G. Schitter, Compact High Performance Hybrid Reluctance Actuated Fast Steering Mirror System, Mechatronics, vol. 62, 2019.
[BibTex] [Download]@Article{TUW-283804, author = {Csencsics, Ernst and Schlarp, Johannes and Schopf, Tobias and Schitter, Georg}, title = {Compact High Performance Hybrid Reluctance Actuated Fast Steering Mirror System}, journal = {Mechatronics}, year = {2019}, volume = {62}, doi = {10.1016/j.mechatronics.2019.102251}, keywords = {Fast steering mirror, Hybrid reluctance actuation, Flux steering, Flexure Design, Tip/tilt system}, numpages = {17} }
- E. Csencsics, B. Sitz, and G. Schitter, Integration of Control Design and System Operation of a High Performance Piezo-actuated Fast Steering Mirror, IEEE/ASME Transactions on Mechatronics, vol. 25, iss. 1, p. 239–247, 2020.
[BibTex] [Download]@article{TUW-283802, author = {Csencsics, Ernst and Sitz, Benjamin and Schitter, Georg}, title = {Integration of Control Design and System Operation of a High Performance Piezo-actuated Fast Steering Mirror}, journal = {IEEE/ASME Transactions on Mechatronics}, year = {2020}, volume = {25}, number = {1}, pages = {239--247}, numpages = {9}, doi = {10.1109/TMECH.2019.2959087}, keywords = {Fast steering mirror, System analysis and design, Optimal control, Motion control, Lissajous trajectory} }
- E. Csencsics, S. Ito, J. Schlarp, and G. Schitter, Hochpräzise roboterbasierte 3D-In-Prozess-Messtechnik, E&I Elektrotechnik und Informationstechnik, vol. 135, iss. 6, p. 382–388, 2018.
[BibTex]@Article{TUW-272940, author = {Csencsics, Ernst and Ito, Shingo and Schlarp, Johannes and Schitter, Georg}, title = {Hochpr{\"a}zise roboterbasierte 3D-In-Prozess-Messtechnik}, journal = {E{\&}I Elektrotechnik und Informationstechnik}, year = {2018}, volume = {135}, number = {6}, pages = {382--388}, doi = {10.1007/s00502-018-0636-1}, keywords = {In-Prozess-Messtechnik; optische Sensoren; 3D-Messtechnik; opto-mechatronische Systeme; Systemintegration} }
- E. Csencsics, J. Schlarp, and G. Schitter, High Performance Hybrid-Reluctance-Force-based Tip/tilt System: Design, Control and Evaluation, IEEE/ASME Transactions on Mechatronics, vol. 23, iss. 5, p. 2494–2502, 2018.
[BibTex] [Download]@Article{TUW-272938, author = {Csencsics, Ernst and Schlarp, Johannes and Schitter, Georg}, title = {High Performance Hybrid-Reluctance-Force-based Tip/tilt System: Design, Control and Evaluation}, journal = {IEEE/ASME Transactions on Mechatronics}, year = {2018}, volume = {23}, number = {5}, pages = {2494--2502}, doi = {10.1109/TMECH.2018.2866272}, keywords = {Reluctance actuator, Flux steering, Tip/tilt sys- tem, Flexure design, Fast steering mirror} }
- E. Csencsics, M. Thier, R. Hainisch, and G. Schitter, System and Control Design of a Voice Coil Actuated Mechanically Decoupling Two-body Vibration Isolation System, IEEE/ASME Transactions on Mechatronics, vol. 23, iss. 1, 2018.
[BibTex] [Download]@Article{TUW-263854, author = {Csencsics, Ernst and Thier, Markus and Hainisch, Reinhard and Schitter, Georg}, title = {System and Control Design of a Voice Coil Actuated Mechanically Decoupling Two-body Vibration Isolation System}, journal = {IEEE/ASME Transactions on Mechatronics}, year = {2018}, volume = {23}, number = {1}, doi = {10.1109/TMECH.2017.2771440}, keywords = {Vibrations, Optimal control, System analysis and design}, numpages = {10} }
- E. Csencsics and G. Schitter, System Design and Control of a Resonant Fast Steering Mirror for Lissajous-based Scanning, IEEE/ASME Transactions on Mechatronics, vol. 22, iss. 5, pp. 1963-1972, 2017.
[BibTex] [Download]@Article{TUW041020172, author = {Csencsics, E. and Schitter, G.}, title = {System Design and Control of a Resonant Fast Steering Mirror for Lissajous-based Scanning}, journal = {IEEE/ASME Transactions on Mechatronics}, year = {2017}, volume = {22}, number = {5}, pages = {1963-1972}, doi = {10.1109/TMECH.2017.2722578} }
Conference articles
- F. Cigarini, S. Ito, J. Konig, A. Sinn, and G. Schitter, Compensation of Hysteresis in Hybrid Reluctance Actuator for High-Precision Motion, in Proceedings of the Joint Conference 8th IFAC Symposium on Mechatronic Systems (MECHATRONICS 2019), and 11th IFAC Symposium on Nonlinear Control Systems (NOLCOS 2019), 2019.
[BibTex]@InProceedings{TUW-281659, author = {Cigarini, Francesco and Ito, Shingo and Konig, Julian and Sinn, Andreas and Schitter, Georg}, title = {Compensation of Hysteresis in Hybrid Reluctance Actuator for High-Precision Motion}, booktitle = {Proceedings of the Joint Conference 8th IFAC Symposium on Mechatronic Systems (MECHATRONICS 2019), and 11th IFAC Symposium on Nonlinear Control Systems (NOLCOS 2019)}, year = {2019}, volume = {52/15}, note = {Vortrag: Joint Conference 8th IFAC Symposium on Mechatronic Systems (MECHATRONICS 2019), and 11th IFAC Symposium on Nonlinear Control Systems (NOLCOS 2019), Wien; 2019-09-04 -- 2019-09-06}, doi = {10.1016/j.ifacol.2019.11.721}, journal = {IFAC-PapersOnLine/Elsevier}, keywords = {Hybrid reluctance actuator, magnetic hysteresis, magnetic flux control}, numpages = {6} }
- E. Csencsics, B. Sitz, and G. Schitter, A Fast Piezo Actuated Tip/Tilt Mirror for raster scan applications, in Proceedings of the Joint Conference 8th IFAC Symposium on Mechatronic Systems (MECHATRONICS 2019), and 11th IFAC Symposium on Nonlinear Control Systems (NOLCOS 2019), 2019.
[BibTex] [Download]@InProceedings{TUW-281660, author = {Csencsics, Ernst and Sitz, Benjamin and Schitter, Georg}, title = {A Fast Piezo Actuated Tip/Tilt Mirror for raster scan applications}, booktitle = {Proceedings of the Joint Conference 8th IFAC Symposium on Mechatronic Systems (MECHATRONICS 2019), and 11th IFAC Symposium on Nonlinear Control Systems (NOLCOS 2019)}, year = {2019}, volume = {52/15}, note = {Vortrag: Joint Conference 8th IFAC Symposium on Mechatronic Systems (MECHATRONICS 2019), and 11th IFAC Symposium on Nonlinear Control Systems (NOLCOS 2019), Wien; 2019-09-04 -- 2019-09-06}, doi = {10.1016/j.ifacol.2019.11.689}, journal = {IFAC-PapersOnLine/Elsevier}, keywords = {Fast steering mirror, System analysis and design, Motion control, Piezo actuation, Optomechatronics}, numpages = {6} }
- S. Ito, B. Lindner, and G. Schitter, Sample-tracking Vibration Isolation with Hybrid Reluctance Actuators for Inline Metrology, in Proceedings of the Joint Conference 8th IFAC Symposium on Mechatronic Systems (MECHATRONICS 2019), and 11th IFAC Symposium on Nonlinear Control Systems (NOLCOS 2019), 2019.
[BibTex]@InProceedings{TUW-281655, author = {Ito, Shingo and Lindner, Bernhard and Schitter, Georg}, title = {Sample-tracking Vibration Isolation with Hybrid Reluctance Actuators for Inline Metrology}, booktitle = {Proceedings of the Joint Conference 8th IFAC Symposium on Mechatronic Systems (MECHATRONICS 2019), and 11th IFAC Symposium on Nonlinear Control Systems (NOLCOS 2019)}, year = {2019}, volume = {52/15}, note = {Vortrag: Joint Conference 8th IFAC Symposium on Mechatronic Systems (MECHATRONICS 2019), and 11th IFAC Symposium on Nonlinear Control Systems (NOLCOS 2019), Wien; 2019-09-04 -- 2019-09-06}, doi = {10.1016/j.ifacol.2019.11.731}, journal = {IFAC-PapersOnLine/Elsevier}, keywords = {Vibration control, Micro and Nano Mechatronic Systems, Motion Control Systems}, numpages = {6} }
- F. Cigarini, S. Ito, S. Troppmair, and G. Schitter, Comparison of a Voice Coil and a Hybrid Reluctance Actuator via FEM, in Proceedings of the IEEJ International Workshop on Sensing, Actuation, Motion Control and Optimization (SAMCON), 2018.
[BibTex]@InProceedings{TUW-268854, author = {Cigarini, Francesco and Ito, Shingo and Troppmair, Stefan and Schitter, Georg}, title = {Comparison of a Voice Coil and a Hybrid Reluctance Actuator via FEM}, booktitle = {Proceedings of the IEEJ International Workshop on Sensing, Actuation, Motion Control and Optimization (SAMCON)}, year = {2018}, note = {Vortrag: IEEJ International Workshop on Sensing, Actuation, Motion Control and Optimization (SAMCON), Tokyo (Japan); 2018-03-06 -- 2018-03-09}, keywords = {Electromagnetic actuators, high-precision applications, finite element method}, numpages = {6} }
- S. Ito, S. Troppmair, F. Cigarini, and G. Schitter, Hybrid Reluctance Actuator for High-speed Scanning with Nanometer Resolution, in Proceedings of the IEEJ International Workshop on Sensing, Actuation, Motion Control and Optimization (SAMCON), 2018.
[BibTex]@InProceedings{TUW-268844, author = {Ito, Shingo and Troppmair, Stefan and Cigarini, Francesco and Schitter, Georg}, title = {Hybrid Reluctance Actuator for High-speed Scanning with Nanometer Resolution}, booktitle = {Proceedings of the IEEJ International Workshop on Sensing, Actuation, Motion Control and Optimization (SAMCON)}, year = {2018}, note = {Vortrag: IEEJ International Workshop on Sensing, Actuation, Motion Control and Optimization (SAMCON), Tokyo (Japan); 2018-03-06 -- 2018-03-09}, numpages = {6} }
- J. Schlarp, E. Csencsics, S. Ito, and G. Schitter, Design and Evaluation of a 3D Printed Flexure for a Fast Steering Mirror, in Proceedings of the 2018 Summer Topical Meeting, Advancing Precision in Additive Manufacturing, 2018.
[BibTex] [Download]@InProceedings{TUW-271207, author = {Schlarp, Johannes and Csencsics, Ernst and Ito, Shingo and Schitter, Georg}, title = {Design and Evaluation of a 3D Printed Flexure for a Fast Steering Mirror}, booktitle = {Proceedings of the 2018 Summer Topical Meeting, Advancing Precision in Additive Manufacturing}, year = {2018}, note = {Vortrag: ASPE and EUSPEN Summer Topical Meeting, Advancing Precision in Additive Manufacturing, Berkeley (USA); 2018-07-22 -- 2018-07-25}, numpages = {5}, }
- E. Csencsics and G. Schitter, Parametric PID Controller Tuning for a Fast Steering Mirror, in Proceedings of the 1st IEEE Conference on Control Technology and Applications (CCTA2017), 2017.
[BibTex] [Download]@InProceedings{TUW041020174, author = {Csencsics, E. and Schitter, G.}, title = {Parametric PID Controller Tuning for a Fast Steering Mirror}, booktitle = {Proceedings of the 1st IEEE Conference on Control Technology and Applications (CCTA2017)}, doi = {10.1109/CCTA.2017.8062697}, numpages = {6}, year = {2017} }
- E. Csencsics and G. Schitter, Design of a phase-locked-loop-based control scheme for Lissajous-trajectory scanning of fast steering mirrors, in Proceedings of the American Control Conference (ACC), 2017, 2017.
[BibTex] [Download]@InProceedings{TUW-041020175, author = {Csencsics, Ernst and Schitter, Georg}, title = {Design of a phase-locked-loop-based control scheme for Lissajous-trajectory scanning of fast steering mirrors}, booktitle = {Proceedings of the American Control Conference (ACC), 2017}, year = {2017}, numpages = {6}, doi = {10.23919/ACC.2017.7963176}, note = {Vortrag: American Control Conference (ACC), 2017, Seattle (USA); 2017-05-24 -- 2017-05-26} }
- E. Csencsics, J. Schlarp, and G. Schitter, Bandwidth extension of hybrid-reluctance-force-based tip/tilt system by reduction of eddy currents, in Proceedings of the 2017 IEEE International Conference on Advanced Intelligent Mechatronics (AIM2017), 2017, pp. 1167-1172.
[BibTex] [Download]@InProceedings{TUW041020173, author = {Csencsics, E. and Schlarp, J. and Schitter, G.}, title = {Bandwidth extension of hybrid-reluctance-force-based tip/tilt system by reduction of eddy currents}, booktitle = {Proceedings of the 2017 IEEE International Conference on Advanced Intelligent Mechatronics (AIM2017)}, year = {2017}, pages = {1167-1172}, doi = {10.1109/AIM.2017.8014176} }
- F. Cigarini, E. Csencsics, R. Saathof, and G. Schitter, Design of Tuneable Damping for Precision Positioning of a Two-Body System, in Proceedings of the 7th IFAC Symposium on Mechatronic Systems, 2016, p. 222–227.
[BibTex] [Download]@InProceedings{TUW-251116, author = {Cigarini, Francesco and Csencsics, Ernst and Saathof, Rudolf and Schitter, Georg}, title = {Design of Tuneable Damping for Precision Positioning of a Two-Body System}, booktitle = {Proceedings of the 7th IFAC Symposium on Mechatronic Systems}, year = {2016}, pages = {222--227}, note = {Posterpr{\"a}sentation: 7th IFAC Symposium on Mechatronic Systems {\&} 15th Mechatronics Forum International Conference, Loughborough (Vereinigte K{\"o}nigreich); 2016-09-05 -- 2016-09-08}, doi = {10.1016/j.ifacol.2016.10.554}, keywords = {Two-body systems, precision positioning, damping} }
- E. Csencsics, R. Saathof, and G. Schitter, Design of a Dual-Tone Controller for Lissajous-based Scanning of Fast Steering Mirrors, in Proceeding of the 2016 American Control Conference, 2016, p. 461–466.
[BibTex] [Download]@InProceedings{TUW-251547, author = {Csencsics, Ernst and Saathof, Rudolf and Schitter, Georg}, title = {Design of a Dual-Tone Controller for Lissajous-based Scanning of Fast Steering Mirrors}, booktitle = {Proceeding of the 2016 American Control Conference}, year = {2016}, pages = {461--466}, note = {Vortrag: American Control Conference 2016, Boston (USA); 2016-07-06 -- 2016-07-08}, doi = {10.1109/ACC.2016.7524957} }
Project Partners
Funding
Ansprechpartner
Univ.-Prof. Dipl.-Ing. Dr.sc.techn. Georg SchitterAssociate Prof. Dipl.-Ing. Dr.techn. Ernst Csencsics
ProjektmitarbeiterInnen
Associate Prof. Dipl.-Ing. Dr.techn. Ernst CsencsicsMAS, Dr.techn. Shingo Ito
Dipl.-Ing. Johannes Schlarp
Dipl.-Ing. BSc. Daniel Wertjanz