
Automatisierte Handhabung biegeschlaffer Materialien
Projektschwerpunkte
- Prototypischer Aufbau eines Handhabungssystems für das automatisierte Handling von formlabilen Halbzeugen
- Untersuchung und Bewertung verschiedener Greifertechnologien
- Mathematische Modellierung des Zug- und Biegeverhaltens biegeschlaffer Kohlefaser-Halbzeuge
- Kontrollierte Vorgabe der Faserzugspannungen der Handhabungsobjekte durch Positions- und Kraftregelung
Beschreibung
Waren Faserverbundwerkstoffe noch vor einigen Jahren ausschließlich „High-End“-Anwendungen in der Luft- und Raumfahrt vorbehalten, so weisen diese, aufgrund ihres enormen Leichtbaupotenzials, auch zunehmend in den Bereichen Automotive, Maschinen- und Anlagenbau, etc. ein starkes Wachstum auf. Für eine branchenübergreifende Nutzung von Faserverbunden müssen allerdings die erheblichen Mehrkosten gegenüber traditionellen Materialien reduziert und gleichzeitig die notwendige Prozesssicherheit gewährleistet werden. Werden die Faserverbunde heute noch weitgehend in manuellen bzw. teilautomatisierten Verfahren hergestellt, geht die Richtung in eine flexible, durchgängige Industrialisierung vorhandener Produktionsprozesse. Dabei stellt insbesondere das (kontur)flexible Aufnehmen der trockenen bzw. teilimprägnierten Halbzeuge vom Schneide- bzw. Ablagetisch und das anschließende kontrollierte Ablegen in gegebene Formwerkzeuge große Herausforderung an die automatisierte Handhabungstechnik dar.
Obwohl bereits zahlreiche Arbeiten zur theoretischen Beschreibung des Zug- und Biegeverhaltens von Kohlefaser-Halbzeugen vorliegen, finden diese aufgrund der Modellkomplexität kaum Anwendung in der automatisierten Handhabung. Nach Stand der Technik wird das Handling der Materialien (zumeist) rein steuerungstechnisch (Stichwort: Teach-In) umgesetzt, d.h. man verzichtet auf jegliches Modellwissen und Rückkopplung durch eine geeignete Sensorik.
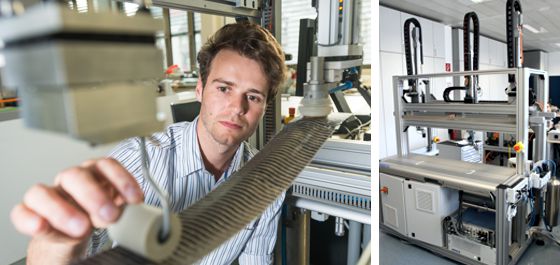
Versuchsaufbau zur automatisierten Handhabung biegeschlaffer Materialien
Im Rahmen dieses Projekts wird prototypisch ein Handhabungssystem aufgebaut und das Potential der modernen modellbasierten Regelungstechnik für die Handhabung biegeschlaffer Materialien, wie sie die Halbzeuge darstellen, untersucht.
Als Handhabungsobjekte werden Gewebe- und Gelegestreifen unterschiedlicher Fadenzahl, Bindung, Dicke und mit unterschiedlichem Flächengewicht untersucht. Für den punktuellen Kraftschluss zwischen Handhabungsobjekt und Greifsystem werden verschiedene Greifer betrachtet und nach deren Eignung für bestimmte Gewebekategorien bewertet. Die Modellparameter der unterschiedlichen Materialien werden im Zuge von einfachen Tests identifiziert und auf Basis des Modells das Deformationsverhalten simuliert. Der Fokus bei der mathematischen Modellierung wird auf eine regelungstechnische Umsetzung gelegt, d.h. es gilt eine echtzeitfähige Vorhersage des Deformationsverhaltens über eine große Materialklasse zu finden. Darauf aufbauend werden geeignete Strategien zu Kraft- und Positionsregelung entworfen. Die kontrollierte Vorgabe der Faserzugspannung während dem Handling ermöglicht eine sichere Aufnahme, die Beibehaltung der geometrischen Bestimmtheit während der Handhabung (keine Faserverschiebungen) und ein faltenfreies, materialschonendes Ablegen in bzw. auf komplexen Formen.
Die Thematik beschränkt sich dabei nicht nur auf das Handling von Kohlefaser-Halbzeugen. Die erarbeiteten Konzepte sind übertragbar auf zahlreiche andere Fragestellungen, wie zum Beispiel dem automatisierten Aufkleben von großflächigen Folien, der Handhabung von Textilien, etc.
Videos
Ausgewählte Veröffentlichungen
- S. Flixeder, Force-Based Cooperative Manipulation of Highly Deformable Materials, A. Kugi and K. Schlacher, Eds., Aachen: Shaker Verlag, 2017, vol. 36.
[BibTex]@Book{Flixeder17a, Title = {Force-Based Cooperative Manipulation of Highly Deformable Materials}, Author = {Flixeder, S.}, Editor = {A. Kugi and K. Schlacher}, Publisher = {Shaker Verlag}, Year = {2017}, Address = {Aachen}, Series = {Modellierung und Regelung komplexer dynamischer Systeme}, Volume = {36}, ISBN = {978-3-8440-5401-9}, Organization = {Institute f{\"u}r Automatisierungs- und Regelungstechnik (TU Wien) und Regelungstechnik und Prozessautomatisierung (JKU Linz)}, } - S. Flixeder, T. Glück, M. Böck, and A. Kugi, Model-Based Signal Processing for the Force Control of Biaxial Gantry Robots, in Proceedings of the 20th IFAC World Congress, Toulouse, France, 2017, p. 3208–3214.
[BibTex]@InProceedings{Flixeder17, author = {Flixeder, S. and Gl\"uck, T. and B\"ock, M. and Kugi, A.}, title = {Model-Based Signal Processing for the Force Control of Biaxial Gantry Robots}, booktitle = {Proceedings of the 20th IFAC World Congress}, year = {2017}, volume = {50}, number = {1}, month = {7}, pages = {3208--3214}, doi = {10.1016/j.ifacol.2017.08.439}, address = {Toulouse, France}, issn = {2405-8963}, } - S. Flixeder, T. Glück, and A. Kugi, Force-based cooperative handling and lay-up of deformable materials: Mechatronic design, modeling, and control of a demonstrator, Mechatronics, vol. 47, p. 246–261, 2017.
[BibTex]@Article{Flixeder16a, Title = {Force-based cooperative handling and lay-up of deformable materials: Mechatronic design, modeling, and control of a demonstrator}, Author = {Flixeder, S. and Gl\"uck, T. and Kugi, A.}, Journal = {Mechatronics}, Pages = {246--261}, Volume = {47}, Year = {2017}, Doi = {10.1016/j.mechatronics.2016.10.003}, ISSN = {0957-4158}, } - S. Flixeder, T. Glück, and A. Kugi, Modeling and Force Control for the Collaborative Manipulation of Deformable Strip-Like Materials, in Proceedings of the 7th IFAC Symposium on Mechatronic Systems & 15th Mechatronics Forum International Conference, Loughborough, UK, 2016, p. 95–102.
[BibTex] [Download]@InProceedings{Flixeder16, author = {Flixeder, S. and Gl\"uck, T. and Kugi, A.}, title = {Modeling and Force Control for the Collaborative Manipulation of Deformable Strip-Like Materials}, booktitle = {Proceedings of the 7th IFAC Symposium on Mechatronic Systems \& 15th Mechatronics Forum International Conference}, year = {2016}, volume = {49}, number = {21}, month = {9}, pages = {95--102}, doi = {10.1016/j.ifacol.2016.10.518}, address = {Loughborough, UK}, issn = {2405-8963}, } - S. Flixeder, T. Glück, M. Böck, R. Neumann, and A. Kugi, Kombinierte Pfad- und Nachgiebigkeitsregelung für ein Portalsystem mit experimenteller Validierung, in Tagungsband Mechatronik, Dortmund, Germany, 2015, p. 37–42.
[BibTex] [Download]@InProceedings{Flixeder15, author = {Flixeder, S. and Gl\"uck, T. and B\"ock, M. and Neumann, R. and Kugi, A.}, title = {{K}ombinierte {P}fad- und {N}achgiebigkeitsregelung f{\"u}r ein {P}ortalsystem mit experimenteller {V}alidierung}, booktitle = {Tagungsband Mechatronik}, year = {2015}, month = {3}, pages = {37--42}, address = {Dortmund, Germany}, } - S. Flixeder, T. Glück, M. Böck, and A. Kugi, Combined Path Following and Compliance Control with Application to a Biaxial Gantry Robot, in Proceedings of the IEEE Conference on Control Applications (CCA), Antibes, France, 2014, p. 796–801.
[BibTex] [Download]@InProceedings{Flixeder14, author = {Flixeder, Stefan and Gl\"uck, Tobias and B\"ock, Martin and Kugi, Andreas}, title = {Combined Path Following and Compliance Control with Application to a Biaxial Gantry Robot}, booktitle = {Proceedings of the IEEE Conference on Control Applications (CCA)}, year = {2014}, month = {10}, pages = {796--801}, doi = {10.1109/CCA.2014.6981438}, address = {Antibes, France}, } - S. Flixeder, T. Glück, M. Böck, and A. Kugi, Kombinierte Pfad- und Impedanzregelung für ein Portalsystem, in Tagungsband GMA-Fachausschuss 1.40 „Theoretische Verfahren der Regelungstechnik“, Anif/Salzburg, Austria, 2014, p. 128–154.
[BibTex]@InProceedings{Flixeder14a, author = {Flixeder, S. and Gl\"uck, T. and B\"ock, M. and Kugi, A.}, title = {Kombinierte {P}fad- und {I}mpedanzregelung f\"ur ein {P}ortalsystem}, booktitle = {Tagungsband GMA-Fachausschuss 1.40 "Theoretische Verfahren der Regelungstechnik"}, year = {2014}, month = {9}, pages = {128--154}, address = {Anif/Salzburg, Austria}, }
Anwendungsbereiche
- Luft- und Raumfahrt
- Automobilindustrie
- Maschinen- und Anlagenbau